Pośrednie regulatory elektryczne
 Sterowniki elektryczne i elektroniczne wykorzystują energię elektryczną do sterowania napędem.
Sterowniki elektryczne i elektroniczne wykorzystują energię elektryczną do sterowania napędem.
Do tworzenia pozycyjnych systemów automatycznego sterowania w odlewniach i warsztatach termicznych stosuje się szeregowe urządzenia o różnych modyfikacjach wyposażone w elektryczne urządzenia kontaktowe. Przetworniki przekaźnikowe (bimetaliczne, dylatometryczne itp.) mogą być używane do sterowania położeniem.
Obwód regulacji temperatury on-off
Na schemacie dwustopniowej regulacji temperatury w suszarce (rys. 1) układ grzania suszarni jest tak rozplanowany, że jeżeli temperatura w przestrzeni roboczej spadnie poniżej dopuszczalnej, to grzanie elementy EK1 muszą być włączone z dużą mocą, a jeśli temperatura wzrośnie powyżej dopuszczalnej, to elementy EK2 z małą mocą.
Jako element czuły zastosowano termometr oporowy 1 połączony z mostkiem elektronicznym 2 w obwodzie trójprzewodowym.Jeśli temperatura w piecu odbiega od ustawionej wartości, wówczas rezystancja elektryczna termometru zmieni się i na przekątnej mostka pojawi się sygnał niezrównoważenia.
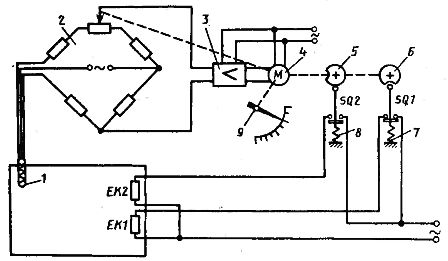
Ryż. 1. Schemat dwupozycyjnego elektrycznego regulatora temperatury
Sygnał wzmocniony przez wzmacniacz elektroniczny 3 napędza obrót silnika rewersyjnego 4. Kierunek jego obrotu zależy od znaku niezrównoważenia, to jest od znaku odchylenia temperatury od wartości zadanej. Dwie tarcze są połączone kinematycznie z wirnikiem silnika elektrycznego: 5 i b, których położenie zależy od kąta obrotu wirnika, a zatem od położenia drutu ślizgowego i strzałki 9 mostka.
Prowadnice styków SQ1 i SQ2 dociskane są do tarcz za pomocą sprężyn 7 i 8. Gdy tarcze się obracają, styk SQ2 zamyka się w przedziale odczytów przyrządu od początku podziałki do doliny tarczy 5 i jest otwarty w przedziale od doliny do maksimum skały. Styk SQ1, przeciwnie, jest otwarty od początku skali do doliny tarczy 6 i jest zamknięty w przedziale od doliny do maksimum skali.
Po osiągnięciu dolnej granicy temperatury styk SQ1 zamyka się i włączane są elementy grzejne dużej mocy EK1. Po osiągnięciu górnej granicy temperatury styk SQ2 zamyka się, a styk SQ1 otwiera się, powodując powolny spadek temperatury. Gdy tylko dolna granica temperatury zostanie osiągnięta, sytuacja się powtórzy i tak dalej.
na ryc. 2 przedstawia schemat ideowy dwustopniowej regulacji temperatury w przestrzeni roboczej pieca komorowego typu SNZ-4,0,8,0,2,6/10 z atmosferą ochronną. Piekarnik jest trójfazowy i podłączony do piekarnika za pomocą bezpieczników FU.Elementy grzejne są włączane i wyłączane za pomocą stycznika. Stabilizację temperatury zapewnia układ automatycznej regulacji (ACS).
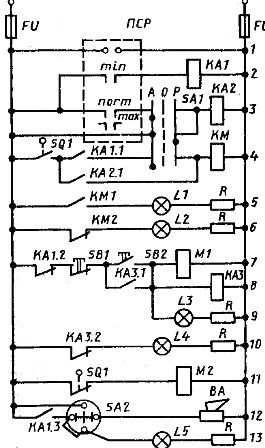
Ryż. 2. Obwód elektryczny do regulacji temperatury przestrzeni roboczej pieca elektrycznego komorowego z atmosferą ochronną
Obwód sterujący składa się z 13 obwodów. Ze względu na ich charakterystykę funkcjonalną można je podzielić na obwody sterowania, obwody zabezpieczające oraz obwody informacyjne. Sterowanie odbywa się poprzez: temperaturę w przestrzeni roboczej pieca (automatyczną i ręczną w przypadku awarii układu automatyki), doprowadzenie atmosfery ochronnej do pieca, doprowadzenie kurtyny gazowej. Schematy informacyjne służą do ostrzegania obsługi za pomocą sygnałów świetlnych i dźwiękowych o różnych trybach pracy pieca.
Piec posiada jedną strefę Regulacja temperatury odbywa się za pomocą automatycznego układu sterowania składającego się z termopary, przewodów kompensacyjnych, potencjometru PSR, przekaźników pośrednich KA1 i KA2, stycznika KM i wreszcie samego pieca SNZ-4,0,8,2,6/10. Potencjometr PSR jest podłączony do obwodu sterującego za pomocą obwodów 1, 2 i 3. Obwód 1 służy do zasilania samego urządzenia PSR.
Obwody 2 i 3 zawierają styki minimalne (min.) i normalne (normalne) termostatu PSR. Maksymalny styk (max) PSR nie jest używany w obwodzie. W obwodach 2 i 3 generowany jest sygnał sterujący, który za pomocą przekaźników pośrednich KA1 i KA2 jest wzmacniany do wartości wymaganej do wysterowania cewki napędowej (stycznik KM). Zatem KA1 i KA2 działają jako wzmacniacze sygnału mocy.
Obwody 3 i 4 mają uniwersalne trójpozycyjne styki przełączające: auto (A), off (O) i manualnie (P). Każda z tych pozycji odpowiada określonemu trybowi pracy pieca: automatyczna regulacja temperatury w piecu, piec jest wyłączony, ręczna regulacja temperatury (tylko podczas regulacji trybów lub w przypadku awarii układu automatycznego sterowania) .
Obwód 4 obejmuje stycznik, a zatem same grzejniki. Stycznik można włączyć tylko przy zamkniętych drzwiach piekarnika. To ostatnie zapewnia wprowadzenie w obwodzie 4 wyłącznika krańcowego SQ1, który wyłącza się po otwarciu drzwi piekarnika. Bezpośrednie włączenie cewki stycznika i odpowiednio jego styków odbywa się w następujący sposób: ze sterowaniem automatycznym - poprzez styki przekaźników pośrednich KA1 i KA2, ze sterowaniem ręcznym - tylko za pomocą styków KA2.1.
Wężownica KA1 załącza się dopiero wtedy, gdy temperatura w palenisku osiągnie wartość minimalną. Cewka KA2 jest podłączona do styku odpowiadającego normalnej temperaturze w piekarniku. Dlatego elementy grzejne pieca pozostają włączone nawet wtedy, gdy temperatura pieca osiągnie wartość zadaną. Grzałki są odłączane od sieci tylko wtedy, gdy temperatura w piekarniku wzrośnie powyżej normy. Tak zbudowane są obwody sterujące stabilizacją temperatury w piekarniku.
O tym, czy piekarnik jest w danej chwili włączony czy wyłączony, informują nas dwie lampki sygnalizacyjne: L1 i L2. Gdy elementy grzejne są włączone, świeci lampka sygnalizacyjna L1, a gdy grzałki są wyłączone, świeci lampka L2. Osiąga się to poprzez połączenie styków stycznika KM w obwodach 5 i b.Rezystory R w obwodach 5 i 5 są potrzebne do obniżenia napięcia w lampkach sygnalizacyjnych z 220 V do napięcia roboczego (rezystory w obwodach lamp pełnią rolę rezystorów obciążających). Obwody 7, 8 i 11 przeznaczone są do sterowania zasilaniem atmosfery ochronnej i kurtyny gazowej.
Obwód zawiera zawory elektromagnetyczne odpowiednio M1 i M2 do doprowadzenia atmosfery ochronnej i doprowadzenia gazu do utworzenia kurtyny gazowej w piecu.
Jak widać ze struktury obwodu 7, doprowadzenie atmosfery ochronnej do pieca jest możliwe tylko wtedy, gdy temperatura w piecu nie spadła do minimum (po włączeniu KA1 obwód 7 otwiera się przez styk KA1. 2 ). System ten jest systemem przeciwwybuchowym. Dopływ gazu do pieca sterowany jest ręcznie za pomocą przycisków SB1 i SB2. Przekaźnik KAZ został wprowadzony w celu zwielokrotnienia styków, ponieważ M1 nie ma styków blokujących.
Po włączeniu M1 (a także KAZ) jednocześnie zapala się lampka sygnalizacyjna L3, informując obsługę o otwarciu zaworu gazowego. Wyłączeniu gazu (przyciskiem SB1) towarzyszy zgaszenie i L3 oraz zaświecenie się kolejnej lampki sygnalizacyjnej — L4, która informuje o zamknięciu zaworu.
Obwody 12 i 13 mają charakter informacyjny. Za pomocą wyłącznika pakietowego SA2 można włączyć syrenę informującą obsługę, że temperatura w palenisku spadła do wartości minimalnej, co świadczy o jakiejś awarii (grzałki powinny się włączyć nawet przy normalnej temperaturze ).
Tak więc minimalny kontakt min PSR jest wykorzystywany w złym schemacie nie tylko jako czujnik stabilizacji temperatury w przestrzeni roboczej pieca, ale także jako czujnik w systemie automatycznego ostrzegania i ochrony.Automatyczny system ostrzegania można wyłączyć, przesuwając przełącznik do drugiej pozycji (obwód 13). Lampka L5 sygnalizuje wyłączenie automatycznego systemu ostrzegania.

Trójpozycyjny obwód regulacji temperatury
W regulatorze trójpołożeniowym regulator posiada trzecie położenie, w którym gdy wartość zmiennej regulowanej jest równa zadanej, obiekt otrzymuje taką ilość energii i materii jaka jest niezbędna do jego normalnej pracy .
Trójpołożeniowy obwód sterujący można uzyskać przez pewną konwersję rozważanego dwupołożeniowego obwodu sterującego (patrz ryc. 1), jeśli trzy przekaźniki pośrednie są sterowane za pomocą styków SQ1 i SQ2. Kiedy styk SQ1 jest zamknięty, przekaźnik K1 włącza się; gdy SQ2 jest zamknięty, przekaźnik K2 jest aktywowany. Jeśli oba styki SQ1 i SQ2 są rozwarte, to przekaźnik zwarciowy jest aktywowany. Za pomocą tych trzech przekaźników elementy grzejne można włączać trójkątem, gwiazdą lub wyłączać, czyli wykonywać trójstopniową regulację temperatury.
Do tworzenia automatycznych systemów sterowania, które stosują prawo sterowania proporcjonalnego, często stosuje się zrównoważony przekaźnik typu BR-3. Ten przekaźnik wykorzystuje dwa przesuwane przewody. Wartość wielkości sterowanej określa położenie suwaka jednego suwaka (czujnik), a stopień otwarcia korpusu regulacyjnego — położenie suwaka suwaka siłownika (sprzężenie zwrotne).
Zadaniem przekaźnika zbalansowanego jest takie oddziaływanie na napęd, aby położenia suwaków obu suwaków były symetryczne.
Na schemacie przekaźnika zbalansowanego BR-3 (ryc.3) głównymi elementami są przekaźnik spolaryzowany RP-5 oraz przekaźniki wyjściowe BP1 i BP2. Podczas gdy położenia suwaków są symetryczne, natężenia prądu płynącego w dwóch cewkach spolaryzowanego przekaźnika są równe, a zatem jego styki są rozwarte. Przekaźniki wyjściowe BP1 i BP2 są pozbawione napięcia, a ich styki wykonawcze są rozwarte.
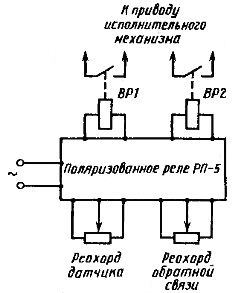
Ryż. 3. Uproszczony schemat blokowy przekaźnika zbalansowanego typu BR-3
W przypadku odchylenia wartości kontrolowanej (np. podczas zwiększania) zmienia się położenie suwaka suwaka czujnika. W rezultacie symetria mostka i równowaga prądu płynącego przez uzwojenia spolaryzowanego przekaźnika zostają zaburzone, a odpowiedni styk zostaje zwarty. W tym przypadku załączany jest przekaźnik wyjściowy, którego styki zawierają napęd, który przesuwa korpus nastawczy w kierunku zmniejszania wartości regulowanej. Równocześnie przesuwa się suwak suwaka sprzężenia zwrotnego.
Napęd działa do momentu, gdy suwak drutu suwaka sprzężenia zwrotnego zajmie pozycję koła suwakowego czujnika, po czym ponownie następuje równowaga. Styki przekaźnika otwierają się i napęd zatrzymuje się. Zapewnia to stałą zależność między wartością sterowanej zmiennej a pozycją regulatora.
Aby stworzyć automatyczne systemy sterowania, które stosują I-, PI- i inne prawa, stosuje się różne sterowniki elektroniczne, w tym regulatory typu IRM-240, VRT-2, EPP-17 itp.