Przykłady programów w języku LAD dla programowalnych sterowników logicznych
Jeden z głównych i dość powszechnych języków programowania przemysłowe sterowniki logiczne (PLC) to język logiki drabinkowej — schemat drabinkowy (ang. LD, inż. LAD, rosyjski RKS).
Ten graficzny język programowania oparty jest na reprezentacji schematów przełączania i jest wygodny dla inżyniera elektryka, ponieważ normalnie zamknięte i normalnie otwarte elementy stykowe języka LAD mogą być podłączone do normalnie zamkniętych i normalnie otwartych przełączników w obwodach elektrycznych.
Od połowy XX wieku systemy automatyki przekaźnikowej są szeroko stosowane w przemyśle od wieków. Na początku lat 70. maszyny przekaźnikowe zaczęto stopniowo zastępować programowalnymi sterownikami. Przez pewien czas obaj pracowali jednocześnie i byli obsługiwani przez tych samych ludzi. W ten sposób pojawiło się zadanie „przeniesienia” obwodów przekaźnikowych do PLC.
Prawie wszyscy wiodący producenci sterowników PLC stworzyli różne opcje programowej implementacji obwodów przekaźnikowych.Ze względu na prostotę prezentacji LAD zyskał zasłużoną popularność, co było głównym powodem włączenia go do normy IEC.
Składnia poleceń LAD jest bardzo podobna do składni języka opisu Ladder. Ta reprezentacja pozwala prześledzić „przepływ energii” między oponami, gdy przechodzi ona przez różne styki, komponenty i elementy wyjściowe (cewki).
Elementy obwodu przełączającego, takie jak styki normalnie otwarte i normalnie zamknięte, są pogrupowane w segmenty. Jeden lub więcej segmentów tworzy sekcję kodu bloku logicznego.
Interfejs programu, napisany w języku LAD, jest przejrzysty i prosty, ponieważ program sterujący LAD jest cykliczny i składa się z wierszy połączonych z lewej strony szyną pionową, a przepływ lub brak prądu w obwodzie odpowiada wynikowi operacja logiczna (true — prąd płynie; false — brak prądu).
Na rysunkach 1 i 2 przedstawiono fragmenty programu opisujące dwie akcje sterowania silnikiem przenośnika w języku LAD:
-
naciśnięcie dowolnego przycisku «Start» uruchamia silnik;
-
naciśnięcie dowolnego przycisku «Stop» lub aktywacja czujnika spowoduje wyłączenie silnika.

Ryż. 1. Uruchomienie silnika po naciśnięciu dowolnego przycisku «Start»
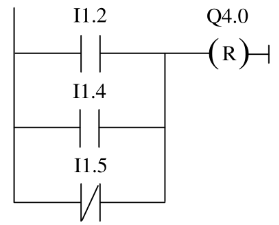
Ryż. 2. Wyłączenie silnika po naciśnięciu dowolnego przycisku „Stop” lub zadziałaniu czujnika
Drugim zadaniem jest określenie kierunku ruchu taśmy przenośnika. Załóżmy, że na taśmie są zainstalowane dwa czujniki fotoelektryczne (REV 1 i REV 2), które określają kierunek ruchu obiektu. Oba działają jako styki normalnie otwarte.
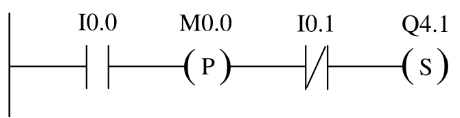
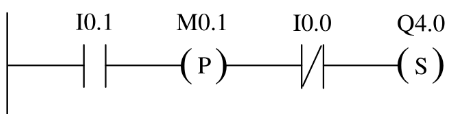
na ryc. 3 — 4 przedstawiono fragmenty programów językowych LAD dla trzech działań:
-
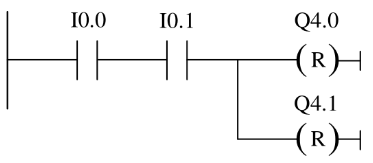
jeżeli na wejściu 10.0 sygnał zmieni się z „0” na „1” (zbocze narastające), a stan sygnału na wejściu I0.1 jest równy „0”, to obiekt taśmowy przesuwa się w lewo;
-
jeżeli na wejściu 10.1 sygnał zmieni się z „0” na „1” (zbocze narastające), a stan sygnału na wejściu I0.0 jest równy „0”, to obiekt taśmowy przesuwa się w prawo;
-
jeśli oba fotosensory są zasłonięte, oznacza to, że obiekt znajduje się między czujnikami.
Ryż. 3. Ruch obiektu w lewo, jeżeli wejście I0.0 zmieni stan z «0» na «1», a wejście I0.1 jest równe «0»
Ryż. 4. Przesuń obiekt w prawo, jeśli wejście I0.1 zmieni się z «0» na «1», a wejście I0.0 jest równe «0»
Ryż. 5. Znalezienie obiektu między czujnikami
na ryc. 3 — 4 przyjęty zapis:
-
wejście 1.0 (REV 1) — fotosensor nr 1;
-
wejście 10.1 (REV 2) — fotosensor nr 2;
-
M0.0 (PMV 1) — znacznik czasu nr 1;
-
М0.1 (РМВ 2) — znacznik czasu nr 2;
-
wyjście Q4.0 (LEWO) — wskaźnik ruchu w lewo;
-
wyjście Q4.1 (PRAWO) — wskaźnik ruchu w prawo.
na ryc. 6 — 9 przedstawiają najprostsze programy czasowe z czterema działaniami:
-
jeśli timer T1 atus jest równy «0», wartość czasu 250 ms w T1 rozpoczyna się, a T1 rozpoczyna się jako rozszerzony timer impulsowy;
-
stan timera jest tymczasowo przechowywany w tokenie pomocniczym;
-
jeśli stan timera T1 to „1”, przejdź do etykiety M001;
-
gdy upłynie czas timera T1, słowo znacznika 100 jest zwiększane o «1».
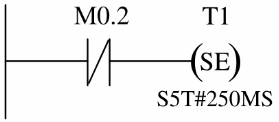
Ryż. 6. Rozszerzony timer startu impulsu

Ryż. 7… Tymczasowe przechowywanie stanu timera w tagu pomocniczym
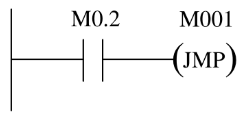
Ryż. 8… Przejdź do etykiety

Ryż. 9… Zwiększ znacznik o «1», gdy upłynie czas timera T1
Przykładowy program w języku LAD dla sterownika LOGO
Uniwersalny moduł logiczny LOGO! to kompaktowy, kompletny funkcjonalnie produkt przeznaczony do rozwiązywania najprostszych zadań automatyzacji z logicznym przetwarzaniem informacji.

Ryż. 10. Moduł LOGO
Korzystanie z modułu LOGO! rozwiązany problem zarządzania Jestem systemem grzewczym w kabinach prysznicowych budynku administracyjno-produkcyjnego.
Skład systemu grzewczego obejmuje następujące elementy:
-
trzy kotły grzewcze wykorzystywane do ogrzewania pomieszczeń;
-
trzy pompy, które cyrkulują płyn chłodzący;
-
rejestry rurociągów i ogrzewania.
System sterowania musi kontrolować temperaturę w kabinach prysznicowych, ciśnienie (pierwszy poziom jest niski, przy którym możliwa jest dalsza praca pod warunkiem, że system napełniania jest włączony, oraz drugi poziom krytyczny, przy którym dalsza praca jest zabroniona) , a także kontrola temperatury czynnika chłodzącego w systemie grzewczym, brak zasobów energetycznych (prąd, gaz).
Ponadto w systemie grzewczym można zapewnić dodatkowe źródła ogrzewania, na przykład grzejniki elektryczne. Niech grzejniki elektryczne włączają się trzy razy dziennie: od 600 do 800; od 1500 do 1700; od 2300 do 0100… Jeśli z jakiegoś powodu temperatura jest poniżej normy w czasie, gdy pracownicy odwiedzają prysznice, wówczas dodatkowo włączane są grzejniki elektryczne.
Jako wejścia i wyjścia używane są:
-
AI1 — sygnał wejściowy z czujnika ciśnienia dla krytycznego poziomu ciśnienia płynu chłodzącego;
-
AI2 — sygnał wejściowy z czujnika ciśnienia dla niskiego poziomu ciśnienia płynu chłodzącego, który umożliwia dalszą pracę;
-
AI3 — sygnał wejściowy z czujnika temperatury, aby zwiększyć temperaturę roboczą płynu chłodzącego;
-
wejście 13 — sygnał wejściowy braku prądu;
-
wejście 14 — sygnał wejściowy braku gazu ziemnego;
-
wyjście Q1 — sygnał wyjściowy załączający instalację grzewczą (pompa obiegowa nr 1);
-
wyjście Q2 — sygnał wyjściowy włączający układ napełniania;
-
wyjście Q3 jest sygnałem wyjściowym wyłączającym kotły instalacji grzewczej (kocioł grzewczy nr 1);
-
wyjście Q4 jest sygnałem wyjściowym przerywającym dopływ gazu do kotłów;
-
wyjście Q5 — sygnał wyjściowy załączający instalację grzewczą (pompa obiegowa nr 2);
-
wyjście Q6 — sygnał wyjściowy załączający instalację grzewczą (pompa obiegowa nr 3);
-
wyjście Q7 jest sygnałem wyjściowym wyłączającym kotły instalacji grzewczej (kocioł grzewczy nr 2);
-
wyjście Q8 jest sygnałem wyjściowym wyłączającym kotły instalacji grzewczej (kocioł grzewczy nr 3);
-
C2 — przycisk startu.
-
B001 to siedmiodniowy timer z trzema trybami.
W przypadku grzejników elektrycznych:
-
AI1 — sygnał wejściowy z czujnika temperatury dla temperatury w prysznicach;
-
wyjście Q1 — sygnał wyjściowy załączający grzałki elektryczne (grzałka elektryczna nr 1);
-
wyjście Q2 — sygnał wyjściowy załączający grzałki elektryczne (grzałka elektryczna nr 3);
-
wyjście Q3 jest sygnałem wyjściowym włączającym grzałki elektryczne (grzałka elektryczna nr 3).
Program do automatycznego sterowania ogrzewaniem napisany w języku programowania w postaci symboli styków przekaźnika (LAD) w pakiecie oprogramowania «LOGO! Miękki komfort » pokazany na rys. 11 i 12.
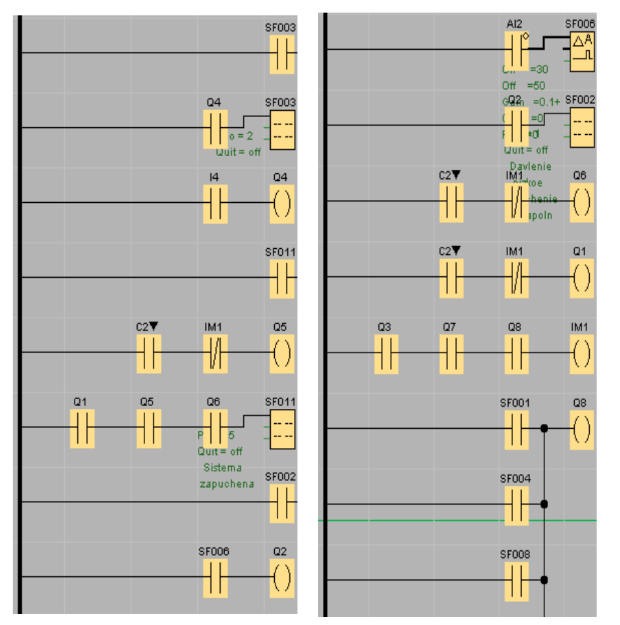
Ryż. jedenaście. First FraG program językowy LAD
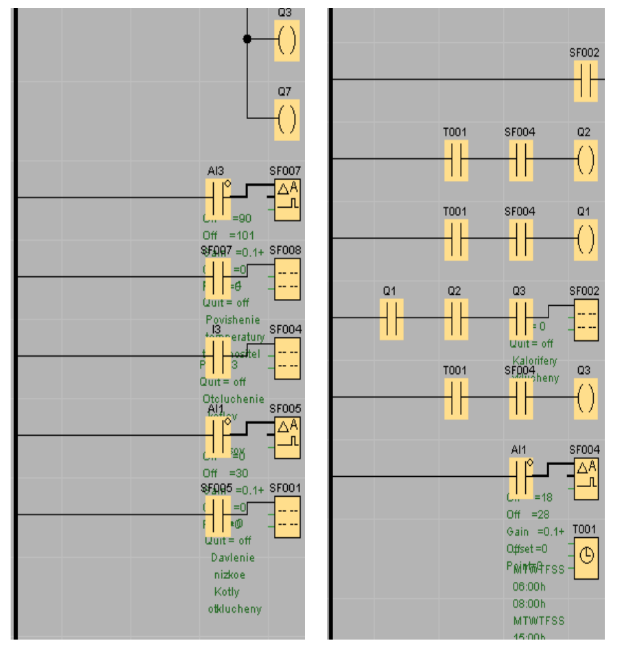
Ryż.12… Drugi fragment programu językowego LAD