Czujniki parametrów technologicznych — siły, ciśnienia, momentu obrotowego
Do realizacji zautomatyzowanej i bardzo dokładnej kontroli procesów technologicznych zawsze niezbędne jest posiadanie informacji o aktualnych wartościach kluczowych parametrów technologicznych. Zwykle stosuje się do tego celu różne czujniki: siły, ciśnienia, momentu obrotowego itp. Przyjrzyjmy się trzem rodzajom czujników, poznajmy zasadę ich działania.

Przede wszystkim zauważamy, że w konstrukcji czujników siły lub momentu obrotowego stosuje się elementy czułe, których pewne właściwości zmieniają się zgodnie z aktualnym stopniem odkształcenia wynikającym z takiego czy innego wpływu zewnętrznego.
Mogą to być sprężyste metalowe płytki, sprężyny lub wałki, których odkształcenie jest przenoszone na element magnetostrykcyjny, piezoelektryczny lub półprzewodnikowy, którego parametry elektryczne lub magnetyczne będą bezpośrednio zależały od stopnia odkształcenia. Wystarczy zmierzyć ten parametr, aby zorientować się w wielkości odkształcenia i odpowiednio siły (ciśnienia, momentu obrotowego).
Tensometryczne czujniki tensometryczne

Najprostszy tensometr oparty na konwerter drutu tensometru obejmuje mechaniczny element elastyczny, który jest poddawany odkształcaniu oraz przymocowany do niego tensometr, którego odkształcenie jest przetwarzane bezpośrednio na sygnał elektryczny.
Cienki (o średnicy od 15 do 60 mikronów) drut nichromowy, konstantanowy lub ellinwarowy, który jest zwinięty wężem i zamocowany na podłożu foliowym, działa jako czujnik tensometryczny. Taki przetwornik przykleja się do powierzchni, której odkształcenie ma być mierzone.
Odkształcenie sprężystego elementu mechanicznego prowadzi do rozciągnięcia lub ściśnięcia drutu na całej jego długości, podczas gdy jego przekrój zmniejsza się lub zwiększa, co wpływa na zmianę rezystancji przekształtnika na prąd elektryczny.
Mierząc tę rezystancję (spadek napięcia na niej), uzyskujemy wyobrażenie o wielkości odkształcenia mechanicznego i odpowiednio siły, pod warunkiem, że znane są parametry mechaniczne odkształconego elementu.
Czujniki momentu obrotowego manometru

Do pomiaru momentu siły stosuje się czułe elementy sprężyste w postaci sprężyn lub cienkich wałków, które w procesie technologicznym są skręcane. Sprężyste odkształcenie kątowe, czyli względny kąt początku i końca sprężyny, jest mierzone i przetwarzane na sygnał elektryczny.
Element elastyczny jest zwykle zamknięty w rurze, której jeden koniec jest nieruchomy, a drugi jest połączony z czujnikiem przemieszczenia kątowego, który mierzy kąt rozbieżności między końcami rurki a elementem odkształcalnym.
W ten sposób uzyskuje się sygnał, który niesie informację o wielkości momentu obrotowego.Aby usunąć sygnał ze sprężyny, druty elementu oporowego są połączone pierścieniami ślizgowymi ze szczotkami.
Czujniki siły magnetostrykcyjnej
Istnieją również czujniki siły z tensometrycznymi przetwornikami magnetostrykcyjnymi. Używany tutaj zjawisko odwrotnej magnetostrykcji (efekt Villari), polegający na tym, że pod wpływem nacisku na rdzeń wykonany ze stopu żelazowo-niklowego (takiego jak permaloid) zmienia się jego przenikalność magnetyczna.
Wzdłużna kompresja rdzenia prowadzi do ekspansji jego pętle histerezy, stromość pętli maleje, co prowadzi do zmniejszenia odpowiednio wartości przenikalności magnetycznej — do zmniejszenia indukcyjności lub wzajemnej indukcyjności uzwojeń czujnika.
Ponieważ charakterystyki magnetyczne są nieliniowe, a także ze względu na fakt, że w znacznym stopniu wpływa na nie temperatura, konieczne staje się zastosowanie układu kompensacyjnego.
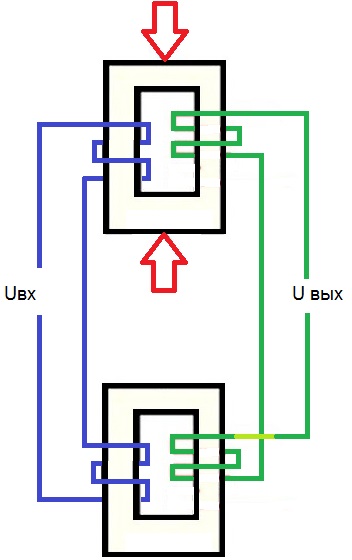
W przypadku odszkodowania obowiązuje następujący ogólny schemat. Zamknięty magnetostrykcyjny rdzeń magnetyczny wykonany z ferrytu niklowo-cynkowego poddawany jest działaniu mierzalnej siły. Na taki rdzeń nie działa siła nacisku, ale uzwojenia dwóch drutów są ze sobą połączone, więc następuje zmiana całkowitego pola elektromagnetycznego.
Uzwojenia pierwotne są identyczne i połączone szeregowo, zasilane są prądem przemiennym o częstotliwości w granicach dziesięciu kiloherców, podczas gdy uzwojenia wtórne (również takie same) są włączone przeciwnie, a przy braku siły odkształcającej całkowita siła elektromotoryczna wynosi 0. Jeśli ciśnienie na pierwszym rdzeniu wzrosło, całkowita siła elektromotoryczna na wyjściu jest niezerowa i proporcjonalna do odkształcenia.