Tyrystorowe regulatory napięcia
 Tyrystorowe regulatory napięcia to urządzenia przeznaczone do sterowania prędkością i momentem obrotowym silników elektrycznych. Regulacja prędkości i momentu obrotowego odbywa się poprzez zmianę napięcia dostarczanego do stojana silnika i odbywa się poprzez zmianę kąta otwarcia tyrystorów. Ten sposób sterowania silnikiem nazywany jest sterowaniem fazowym. Metoda ta jest rodzajem sterowania parametrycznego (amplitudy).
Tyrystorowe regulatory napięcia to urządzenia przeznaczone do sterowania prędkością i momentem obrotowym silników elektrycznych. Regulacja prędkości i momentu obrotowego odbywa się poprzez zmianę napięcia dostarczanego do stojana silnika i odbywa się poprzez zmianę kąta otwarcia tyrystorów. Ten sposób sterowania silnikiem nazywany jest sterowaniem fazowym. Metoda ta jest rodzajem sterowania parametrycznego (amplitudy).
Tyrystorowe regulatory napięcia mogą być realizowane zarówno z zamkniętymi, jak i otwartymi układami sterowania. Regulatory z otwartą pętlą nie zapewniają zadowalającej wydajności regulacji prędkości. Ich głównym celem jest regulacja momentu obrotowego w celu uzyskania pożądanego trybu pracy napędu w procesach dynamicznych.
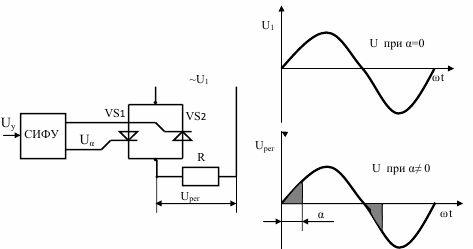
Uproszczony schemat tyrystorowego regulatora napięcia
Sekcja mocy jednofazowego tyrystorowego regulatora napięcia zawiera dwa sterowane tyrystory, które zapewniają przepływ prądu elektrycznego na obciążeniu w dwóch kierunkach przy sinusoidalnym napięciu wejściowym.
Sterowniki tyrystorowe z zamkniętą pętlą stosuje się z reguły z ujemnym sprzężeniem zwrotnym prędkości, co pozwala na uzyskanie wystarczająco sztywnych charakterystyk mechanicznych napędu w obszarze małych prędkości obrotowych.
Najbardziej efektywne wykorzystanie regulatorów tyrystorowych do regulacji prędkości i momentu obrotowego asynchroniczne silniki wirnikowe.
Obwody zasilania regulatorów tyrystorowych
na ryc. 1, a-e pokazują możliwe schematy włączania elementów prostownika regulatora do jednej fazy. Najczęstszym z nich jest schemat na ryc. 1, za. Można go zastosować do dowolnego schematu połączeń uzwojeń stojana. Dopuszczalny prąd płynący przez obciążenie (wartość skuteczna) w tym obwodzie w trybie prądu ciągłego wynosi:

gdzie Azt jest dopuszczalną średnią wartością prądu płynącego przez tyrystor.
Maksymalne napięcie tyrystora do przodu i do tyłu

gdzie kzap — współczynnik bezpieczeństwa dobrany z uwzględnieniem możliwych przepięć łączeniowych w obwodzie; — wartość skuteczna napięcia sieciowego.
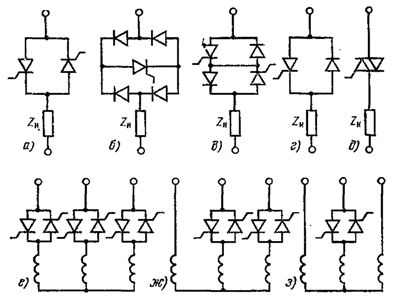
Ryż. 1. Schematy obwodów mocy tyrystorowych regulatorów napięcia.
Na schemacie rys. 1b, w przekątnej mostka diod niesterowanych znajduje się tylko jeden tyrystor. Stosunek między prądami obciążenia i tyrystorów dla tego obwodu wynosi:

Niekontrolowane diody są wybierane dla prądu o połowę mniejszego niż tyrystor. Maksymalne napięcie przewodzenia do tyrystora
Napięcie wsteczne tyrystora jest bliskie zeru.
Schemat na ryc. 1b ma pewne różnice w stosunku do schematu z fig. 1, ale do budowy systemu zarządzania. Na schemacie rys. 1, a impulsy sterujące dla każdego z tyrystorów muszą być zgodne z częstotliwością zasilania. Na schemacie rys.1b częstotliwość impulsów sterujących jest dwukrotnie większa.
Schemat na ryc. 1, c, składający się z dwóch tyrystorów i dwóch diod, jeśli to możliwe, sterowanie, obciążenie, prąd i maksymalne napięcie przewodzenia tyrystorów jest podobne do schematu na ryc. 1, za.
Napięcie wsteczne w tym obwodzie z powodu bocznikowania diody jest bliskie zeru.
Schemat na ryc. 1d pod względem prądu i maksymalnego napięcia do przodu i do tyłu tyrystorów jest podobny do obwodu z ryc. 1, za. Schemat na ryc. 1, d różni się od rozważanych wymagań, aby układ sterowania zapewniał niezbędny zakres zmian kąta sterowania tyrystorem.Jeżeli kąt jest liczony od napięcia fazy zerowej, to dla obwodów na ryc. 1, a-c, relacja
gdzie φ- kąt fazowy obciążenia.
Dla obwodu z rys. 1, d, podobny stosunek przyjmuje postać:
Konieczność zwiększenia zakresu zmiany kąta komplikuje układ sterowania tyrystorowego… Schemat na ryc. 1, d można zastosować, gdy uzwojenia stojana są połączone w gwiazdę bez przewodu neutralnego iw trójkąt z prostownikami zawartymi w przewodach linii. Zakres tego schematu jest ograniczony do nieodwracalnych i odwracalnych napędów elektrycznych ze stykiem odwrotnym.
Schemat na ryc. 4-1, e w swoich właściwościach jest podobny do schematu na ryc. 1, za. Prąd triaka jest tutaj równy prądowi obciążenia, a częstotliwość impulsów sterujących jest równa dwukrotności częstotliwości napięcia zasilania. Wada obwodu triaka jest znacznie mniejsza niż w przypadku konwencjonalnych tyrystorów, dopuszczalne wartości du / dt i di / dt.
W przypadku regulatorów tyrystorowych najbardziej racjonalny schemat przedstawiono na ryc. 1, ale z dwoma tyrystorami połączonymi antyrównolegle.
Obwody mocy regulatorów realizowane są tyrystorami antyrównoległymi we wszystkich trzech fazach (układ trójfazowy symetryczny), w dwóch i jednej fazie silnika, jak pokazano na rys. odpowiednio 1, f, g i h.
W regulatorach stosowanych w napędach elektrycznych dźwigów najbardziej rozpowszechniony jest symetryczny obwód przełączający pokazany na rys. 1, e, który charakteryzuje się najniższymi stratami z wyższych prądów harmonicznych. Większe straty w obwodach z czterema i dwoma tyrystorami wynikają z nierównowagi napięć w fazach silnika.
Podstawowe dane techniczne regulatorów tyrystorowych serii PCT
Regulatory tyrystorowe serii PCT są urządzeniami służącymi do zmiany (zgodnie z zadanym prawem) napięcia dostarczanego do stojana silnika indukcyjnego z uzwojonym wirnikiem. Sterowniki tyrystorowe serii PCT są wykonane zgodnie z symetrycznym trójfazowym obwodem przełączającym (ryc. 1, e). Zastosowanie regulatorów podanej serii w napędach elektrycznych żurawi umożliwia regulację częstotliwości obrotów w zakresie 10:1 oraz regulację momentu obrotowego silnika w trybach dynamicznych podczas rozruchu i zatrzymania.
Regulatory tyrystorowe serii PCT przeznaczone są do prądów ciągłych 100, 160 i 320 A (prądy maksymalne odpowiednio 200, 320 i 640 A) oraz napięć 220 i 380 V AC. Regulator składa się z trzech zasilaczy zamontowanych na wspólnej ramie (zgodnie z ilością faz połączonych antyrównolegle tyrystorów), zespołu czujnika prądu oraz zespołu automatyki. W zasilaczach zastosowano tyrystory tabletkowe z chłodnicami z wytłaczanego profilu aluminiowego. Chłodzenie powietrzem — naturalnie. Blok automatyki jest taki sam dla wszystkich wersji regulatorów.
Regulatory tyrystorowe produkowane są w stopniu ochrony IP00 i przeznaczone są do montażu na standardowych ramkach sterowników magnetycznych typu TTZ, zbliżonych konstrukcyjnie do sterowników serii TA i TCA. Wymiary gabarytowe oraz wagę regulatorów serii PCT przedstawiono w tabeli. 1.
Tabela 1 Wymiary gabarytowe i masa regulatorów napięcia serii PCT

Sterowniki magnetyczne TTZ wyposażone są w styczniki kierunkowe do nawrotu silnika, styczniki obwodu wirnika oraz inne elementy przekaźnikowo-stykowe napędu elektrycznego, które komunikują sterownik z regulatorem tyrystorowym. Budowę układu sterowania regulatora widać na schemacie funkcjonalnym napędu elektrycznego pokazanym na rys. 2.
Trójfazowy symetryczny blok tyrystorowy T jest sterowany przez układ kontroli fazy SFU. Za pomocą regulatora KK w regulatorze zmienia się zadana prędkość obrotowa BZS Poprzez blok BZS w funkcji czasu sterowany jest akcelerator KU2 w obwodzie wirnika. Różnica między sygnałami odniesienia a tachogeneratorem TG jest wzmacniana przez wzmacniacze U1 i UZ.Do wyjścia wzmacniacza UZ podłączony jest przekaźnik logiczny, który ma dwa stany stabilne: jeden odpowiada załączeniu stycznika kierunku jazdy do przodu KB, drugi - do załączenia stycznika do przodu w kierunku wstecznym KN.
Równocześnie ze zmianą stanu urządzenia logicznego następuje odwrócenie sygnału w obwodzie sterowania rozdzielnicy. Sygnał ze wzmacniacza dopasowującego U2 jest sumowany z sygnałem sprzężenia zwrotnego opóźnionego prądu stojana silnika, który pochodzi z bloku ograniczenia prądu TO i jest podawany na wejście SFU.
Na blok logiczny BL oddziałuje również sygnał z czujnika prądu DT i modułu obecności prądu NT, co uniemożliwia załączenie styczników kierunkowych pod napięciem. Jednostka BL wykonuje również nieliniową korekcję układu stabilizacji prędkości w celu zapewnienia stabilności napędu. Regulatory mogą być stosowane w napędach elektrycznych mechanizmów podnoszących i jezdnych.
Regulatory serii PCT wykonane są z układem ograniczania prądu. Poziom ograniczenia prądu dla zabezpieczenia tyrystorów przed przeciążeniem i dla ograniczenia momentu obrotowego silnika w trybach dynamicznych zmienia się płynnie od 0,65 do 1,5 prądu znamionowego regulatora, poziom ograniczenia prądu dla zabezpieczenia nadprądowego — od 0,9 do. 2,0 prąd znamionowy regulatora. Szeroki zakres nastaw zabezpieczeń pozwala na współpracę regulatora tej samej wielkości standardowej z silnikami różniącymi się mocą około 2-krotnie.
Ryż. 2. Schemat funkcjonalny napędu elektrycznego z regulatorem tyrystorowym typu PCT: KK — sterownik rozkazowy; TG — tachogenerator; KN, KB — styczniki kierunkowe; BZS — blok nastawy prędkości; BL — blok logiczny; U1, U2. USA — wzmacniacze; SFU — układ kontroli fazy; DT — czujnik prądu; IT — obecna jednostka obecności; TO — jednostka ograniczająca prąd; MT — jednostka ochronna; KU1, KU2 — styczniki przyspieszenia; KL — stycznik liniowy: R — wyłącznik.
Ryż. 3. Tyrystorowy regulator napięcia PCT
Czułość systemu obecności prądu wynosi 5-10 A rms prądu w fazie. Regulator zapewnia również ochronę: zerową, przed przepięciami łączeniowymi, przed zanikiem prądu w co najmniej jednej z faz (bloki IT i MT), przed zakłóceniami w odbiorze radiowym.Bezpieczniki szybkie typu PNB 5M zapewniają ochronę przed prądami zwarciowymi.