Zmienny napęd elektryczny jako sposób oszczędzania energii
 Przejście od nieregulowanego napędu elektrycznego do regulowanego jest jednym z głównych sposobów oszczędzania energii w napędzie elektrycznym iw polu technologicznym za pomocą napędu elektrycznego.
Przejście od nieregulowanego napędu elektrycznego do regulowanego jest jednym z głównych sposobów oszczędzania energii w napędzie elektrycznym iw polu technologicznym za pomocą napędu elektrycznego.
Z reguły konieczność sterowania prędkością lub momentem obrotowym napędów elektrycznych mechanizmów produkcyjnych podyktowana jest wymaganiami procesu technologicznego. Np. prędkość posuwu frezu decyduje o czystości obróbki przedmiotu na tokarce, zmniejszenie prędkości windy jest niezbędne do dokładnego pozycjonowania wagonu przed zatrzymaniem, konieczność regulacji momentu obrotowego wału naciągowego podyktowana jest warunki utrzymania stałej siły naprężenia zranionego materiału itp.
Istnieje jednak szereg mechanizmów, które nie wymagają zmiany prędkości w zależności od warunków technologicznych lub do regulacji stosuje się inne (nieelektryczne) metody oddziaływania na parametry procesu technologicznego.
Przede wszystkim obejmują mechanizmy transportu ciągłego do przemieszczania produktów stałych, płynnych i gazowych: przenośniki, wentylatory, wentylatory, zespoły pompowe. W przypadku tych mechanizmów obecnie z reguły stosuje się nieregulowane asynchroniczne napędy elektryczne, które wprawiają ciała robocze w ruch ze stałą prędkością, niezależnie od obciążenia mechanizmów. Przy częściowym obciążeniu tryby pracy przy stałej prędkości charakteryzują się wzrostem określone zużycie energii w porównaniu z trybem nominalnym.
Zmniejszenie wydajności NSC, wydajność przenośnika spada, ponieważ względny udział zużytej mocy pokonuje moment bezczynności. Bardziej ekonomiczny jest tryb zmiennej prędkości, który zapewnia taką samą wydajność, ale ze stałym składnikiem siły uciągu.
na ryc. Na rys. 1 przedstawiono zależności mocy wału silnika dla przenośnika o momencie jałowym Mx = 0, ЗМв dla stałych (v — const) i regulowanych (Fg = const) prędkości ruchu ładunków. Zacieniony obszar na rysunku przedstawia oszczędności energii uzyskane dzięki regulacji prędkości.
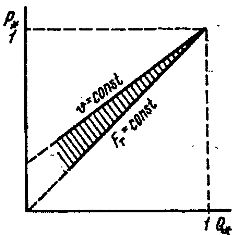
Ryż. 1. Zależność mocy wału silnika elektrycznego od wydajności przenośnika
Jeśli więc prędkość przenośnika zostanie zmniejszona do 60% wartości nominalnej, to moc na wale silników zmniejszy się o 10% w stosunku do wartości nominalnej. Efekt regulacji prędkości jest tym większy, im większy jest moment obrotowy na biegu jałowym i tym bardziej zmniejsza się wydajność przenośnika.
Zmniejszenie prędkości mechanizmów transportu ciągłego z niedociążeniem pozwala wykonać wymaganą ilość pracy przy niższym jednostkowym zużyciu energii, tj. rozwiązać czysto ekonomiczny problem zmniejszenia energochłonności w procesie technologicznym przemieszczania produktów.
Zwykle wraz ze zmniejszeniem prędkości takich mechanizmów pojawia się również efekt ekonomiczny dzięki poprawie właściwości eksploatacyjnych urządzeń technologicznych. Tak więc, gdy prędkość spada, zmniejsza się zużycie korpusu przenośnika, zwiększa się żywotność rurociągów i armatury ze względu na spadek ciśnienia wytwarzanego przez maszyny do dostarczania cieczy i gazów, a także eliminowane jest nadmierne zużycie tych produktów.
Efekt w dziedzinie techniki często okazuje się znacznie większy niż wynikający z oszczędności energii, dlatego z gruntu błędne jest decydowanie o celowości zastosowania sterowanego napędu elektrycznego do takich mechanizmów oceniając jedynie aspekt energetyczny.
Kontrola prędkości maszyn łopatowych.
Mechanizmy odśrodkowe do dostarczania cieczy i gazów (wentylatory, pompy, wentylatory, sprężarki) są głównymi ogólnoprzemysłowymi mechanizmami o największym potencjale w całym kraju do znacznego obniżenia jednostkowego zużycia energii. Szczególną pozycję mechanizmów odśrodkowych tłumaczy ich masywność, duża moc, z reguły z długim trybem pracy.
Uwarunkowania te decydują o znaczącym udziale tych mechanizmów w bilansie energetycznym kraju.Łączna moc zainstalowana silników napędowych pomp, wentylatorów i sprężarek to około 20% mocy wszystkich elektrowni, przy czym same wentylatory zużywają około 10% całej energii elektrycznej produkowanej w kraju.
Właściwości eksploatacyjne mechanizmów odśrodkowych przedstawiono w postaci zależności wysokości podnoszenia H od natężenia przepływu Q oraz mocy P od natężenia przepływu Q. W trybie pracy stacjonarnej wysokość podnoszenia wytwarzana przez mechanizm odśrodkowy jest równoważona przez ciśnienie sieci hydro- lub aerodynamicznej, w której dostarcza ciecz lub gaz.
Składowa statyczna ciśnienia jest określana dla pomp — przez geodezyjną różnicę poziomów użytkownika i pompy; dla fanów — atrakcja przyrodnicza; dla wentylatorów i sprężarek — od ciśnienia sprężonego gazu w sieci (zbiorniku).
Punkt przecięcia charakterystyk Q-H pompy i sieci określa parametry H-Hn i Q — Qn. Regulacja wydatku Q pompy pracującej ze stałą prędkością odbywa się zwykle za pomocą zaworu na wylocie i prowadzi do zmiany charakterystyki sieci, w wyniku czego natężenie przepływu QA * <1 odpowiada punkt przecięcia z charakterystyką pompy.
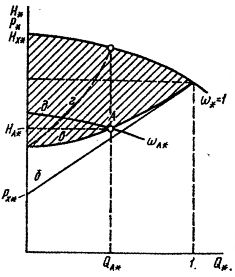
Ryż. 2. Charakterystyka Q-H zespołu pompującego
Analogicznie do obwodów elektrycznych, regulacja przepływu przez zawór jest podobna do regulacji prądu poprzez zwiększenie rezystancji elektrycznej obwodu. Oczywiście ten sposób sterowania nie jest efektywny energetycznie, gdyż towarzyszą mu bezproduktywne straty energii w elementach regulacyjnych (rezystor, zawór). Utratę zaworu charakteryzuje zacieniony obszar na ryc. 1.
Podobnie jak w przypadku obwodu elektrycznego bardziej ekonomiczna jest regulacja źródła energii niż jej użytkownika. W tym przypadku prąd obciążenia zmniejsza się w obwodach elektrycznych z powodu spadku napięcia źródła. W sieciach hydraulicznych i aerodynamicznych podobny efekt uzyskuje się poprzez zmniejszenie ciśnienia wytwarzanego przez mechanizm, co jest realizowane poprzez zmniejszenie prędkości jego wirnika.
Wraz ze zmianą prędkości zmieniają się charakterystyki działania mechanizmów odśrodkowych zgodnie z prawami podobieństwa, które mają postać: Q * = ω *, H * = ω *2, P * = ω *3
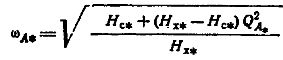
Prędkość wirnika pompy, przy której jego charakterystyka przejdzie przez punkt A:
Wyrażenie na moc pobieraną przez pompę podczas regulacji prędkości to:

Kwadratowa zależność momentu od prędkości jest charakterystyczna głównie dla wentylatorów, ponieważ składowa statyczna głowicy określona przez naturalny ciąg jest znacznie mniejsza niż Hx. W literaturze technicznej czasami stosuje się przybliżoną zależność momentu od prędkości, która uwzględnia tę właściwość mechanizmu odśrodkowego:
M* = ω *n
gdzie n = 2 w przy Hc = 0 i nHc> 0. Obliczenia i eksperymenty pokazują, że n=2 — 5, a jego duże wartości są charakterystyczne dla sprężarek pracujących w sieci o znacznym przeciwciśnieniu.
Z analizy trybów pracy pompy przy stałej i zmiennej prędkości obrotowej wynika, że nadwyżka energochłonności przy ω= const okazuje się bardzo znacząca. Na przykład wyniki obliczeń trybów pracy pompy z parametrami pokazano poniżej Hx * = 1,2; Px*= 0,3 w sieci o różnym przeciwciśnieniu Зс:
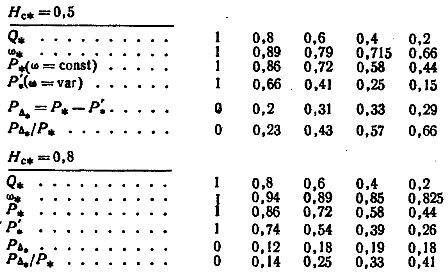
Z podanych danych wynika, że sterowany napęd elektryczny może znacznie zmniejszyć zużycie zużywanej energii elektrycznej: do 66% w pierwszym przypadku i do 41% w drugim przypadku. W praktyce efekt ten może okazać się jeszcze większy, gdyż z różnych przyczyn (brak lub awaria zaworów, ręczne uruchamianie) w ogóle nie stosuje się regulacji zaworami, co prowadzi nie tylko do wzrostu zużycia energii elektrycznej, ale także nadmiernych wysiłków i kosztów w sieci hydraulicznej.
Zagadnienia energetyczne mechanizmów odśrodkowych jednostronnego działania w sieci o stałych parametrach zostały omówione powyżej. W praktyce występuje równoległa praca mechanizmów odśrodkowych, a sieć często ma zmienne parametry. Na przykład opór aerodynamiczny sieci wydobywczej zmienia się wraz ze zmianą długości ścian, opór hydrodynamiczny sieci wodociągowych zależy od trybu zużycia wody, który zmienia się w ciągu dnia itp.
Przy równoległym działaniu mechanizmów odśrodkowych możliwe są dwa przypadki:
1) prędkość wszystkich mechanizmów jest regulowana jednocześnie i synchronicznie;
2) regulowana jest prędkość jednego mechanizmu lub części mechanizmów.
Jeżeli parametry sieci są stałe, to w pierwszym przypadku wszystkie mechanizmy można uznać za jeden odpowiednik, dla którego obowiązują wszystkie powyższe zależności. W drugim przypadku docisk części nieregulowanej mechanizmów ma taki sam wpływ na część regulowaną jak przeciwciśnienie i jest bardzo znaczny, dlatego oszczędność energii elektrycznej tutaj nie przekracza 10-15% mocy nominalnej maszyny.
Zmienne parametry sieci znacznie komplikują analizę współpracy mechanizmów odśrodkowych z siecią. W takim przypadku efektywność energetyczną sterowanego napędu elektrycznego można określić w postaci obszaru, którego granice odpowiadają wartościom granicznym parametrów sieci i prędkości mechanizmu odśrodkowego.
Zobacz też w tym temacie: Przetwornice częstotliwości VLT AQUA Drive do agregatów pompowych