Zamknięte układy automatyki
 Zamknięte systemy automatycznej regulacji (ACS) różnią się od obwodów otwartych zastosowanym sprzętem i kompletnością automatyzacji. Przy otwartym ACS jednostka główna (w tym urządzenia sterujące) nie otrzymuje informacji o aktualnym trybie pracy instalacji elektrycznej (silnik napędowy, działająca maszyna).
Zamknięte systemy automatycznej regulacji (ACS) różnią się od obwodów otwartych zastosowanym sprzętem i kompletnością automatyzacji. Przy otwartym ACS jednostka główna (w tym urządzenia sterujące) nie otrzymuje informacji o aktualnym trybie pracy instalacji elektrycznej (silnik napędowy, działająca maszyna).
W zamkniętym ASUB-ie informacja przekazywana jest do elementów sterujących, czemu towarzyszy podanie odpowiednich sygnałów rozkazowych. Obwód, który przesyła takie informacje, zamyka pętlę sterowania, tworząc zamknięty ACS lub sprzężenie zwrotne ACS.
Różnicę między zamkniętym a otwartym ACS można wyjaśnić na przykładzie sterowania prędkością silnika elektrycznego w układzie generator-silnik (G-D). Przy otwartym ACS (ryc. 1, a) ustawioną prędkość silnika elektrycznego ustawia się ręcznie za pomocą potencjometru P. Regulacja prędkości odbywa się wizualnie za pomocą obrotomierza, który jest zasilany przez tachogenerator TG. Wszelkie odchylenia prędkości od wartości zadanej są eliminowane przez operatora poprzez działanie na suwak potencjometru.
W zamkniętym ACS (ryc.1, b) twornik tachogeneratora TG jest zawarty w obwodzie wzbudzenia generatora OVG, tworząc układ zamknięty lub sprzężenie zwrotne (w tym przypadku ze sprzężeniem zwrotnym prędkości).
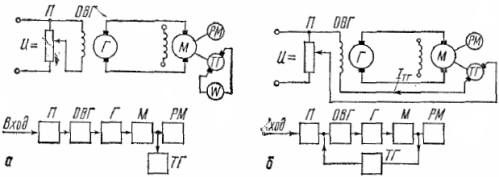
Ryż. 1. Obwód sterowania silnikiem elektrycznym w układzie G-M: a — SZP otwarty, b — SZP zamknięty
Prąd generowany przez tachogenerator (Aztg) w obwodzie zamkniętym skierowany na prąd potencjometru (Azn) i prąd wynikowy działa w obwodzie równy różnicy geometrycznej tych prądów. Za pomocą suwaka potencjometru operator ustawia wartość prądu wynikowego w cewce wzbudzenia OVG, przy której zapewniona jest odpowiednia prędkość silnika elektrycznego. Na tym kończy się rola operatora. W przyszłości system automatycznie utrzymuje ustawiony tryb pracy napędu elektrycznego z określoną dokładnością.
Załóżmy, że w wyniku skoku obciążenia prędkość silnika elektrycznego spadła w porównaniu z określoną. Zmniejszeniu prędkości towarzyszy odpowiednie zmniejszenie prędkości tachogeneratora i napięcia na jego zaciskach. To z kolei doprowadzi do zmniejszenia prądu Aztg w obwodzie sprzężenia zwrotnego, aw pewnym położeniu suwaka potencjometru - do wzrostu wynikowego prądu w uzwojeniu wzbudzenia generatora. Napięcie generatora i prędkość silnika odpowiednio wzrosną.
Proces zwiększania prędkości i napięcia będzie trwał do momentu, gdy prąd w pętli sprzężenia zwrotnego osiągnie zadaną wartość i prędkość silnika osiągnie zadaną wartość.
W analizie układów automatyki wykresy funkcji… Na ryc.2 schemat funkcjonalny przekładni ACS, na który składają się następujące elementy:
1 — urządzenie główne, które ustawia tryb pracy, wydaje polecenie, impuls startowy lub sygnał,
2 — element porównania. Zawiera sygnał X1 z mastera, sygnał X0, który określa prędkość lub poziom wartości kontrolowanej. Uwzględniając sygnał z dziewiątego głównego elementu sprzężenia zwrotnego, element 2 porównuje odebrane sygnały i wysyła dodatkowo skorygowany sygnał X2,
3 — element przekształcający, sygnał op przekształca go w inną formę, wygodniejszą do dalszej transmisji. Np. sygnał X2 dostarczany jest w postaci ciśnienia hydraulicznego (pneumatycznego, mechanicznego) Element 3 przetwarza go na prąd elektryczny. Ponieważ tego rodzaju transformacja może wymagać dodatkowej energii, element 3 jest podłączony do źródła energii PE,
4 — element dodający, otrzymuje dwa sygnały: X3 i X8 z elementu korygującego (elementu pamięciowego) 8. Sygnały te są sumowane przez element 4 i przesyłane do kolejnego elementu,
5 — element wzmacniający, sygnał wejściowy X1 może być słaby i musi zostać wzmocniony do późniejszej transmisji. Odbywa się to poprzez element 5, który jest podłączony do źródła zasilania PE,
6 — element wykonawczy, wykonuje odebrany sygnał (silnik elektryczny, przekaźnik elektromagnetyczny, serwomotor),
7 — regulowany przedmiot lub maszyna robocza.
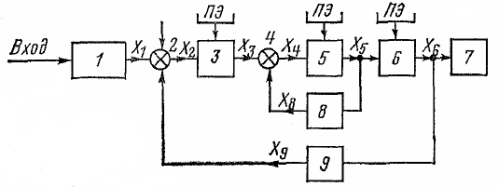
Ryż. 2. Schemat funkcjonalny ACS
Każdy element automatyki jest przetwornikiem energii, na którego wejście podawana jest wartość X', a wartość X jest usuwana z wyjścia. „Dla każdego elementu w stanie stacjonarnym istnieje pewna zależność X” (X'), zwana charakterystyką statyczną.
Zamknięty układ automatyki charakteryzuje się obecnością sprzężenia zwrotnego; ma co najmniej jedną pętlę sprzężenia zwrotnego łączącą wyjście systemu z jego wejściem. Dodatkowo może występować tzw. sprzężenie zwrotne wewnętrzne, łączące wyjście i wejście poszczególnych elementów ACS.
Feedback dzieli się na twardy i elastyczny. Ograniczenia twarde działają zarówno w przejściowych, jak i stacjonarnych trybach pracy systemu, elastyczne — tylko w przejściowych. Rozróżnij pozytywną i negatywną informację zwrotną. Wraz ze wzrostem regulowanej wartości dodatnie połączenie zwiększa ją jeszcze bardziej, a ujemne przeciwnie, maleje. Sprzężenia zwrotne mogą przesyłać sygnały proporcjonalne do kąta obrotu, prędkości, napięcia, prądu itp. i są odpowiednio nazywane sprzężeniami zwrotnymi kąta, prędkości, napięcia i prądu. Aby uzyskać więcej informacji, zobacz tutaj: Elementy układów automatyki
Zgodnie z zasadą działania ACS można podzielić na trzy grupy:
-
praca ciągła, w której nie zostaje zerwana zależność między wartościami kontrolowanymi i zadanymi,
-
działanie impulsowe, w którym w regularnych odstępach czasu następuje połączenie pomiędzy wartościami kontrolowanymi i zadanymi,
-
działanie przekaźnika, w którym komunikacja występuje tylko wtedy, gdy wartość osiągnie określoną wartość.
W zależności od prawa, według którego dana wartość zmienia się w czasie, ACS można również podzielić na trzy grupy:
-
systemy o stałej lub niskiej wartości zadanej, w których automatycznie regulowana wartość jest utrzymywana na stałym poziomie. Są to systemy stabilizacji, które zasadniczo są systemami automatycznego sterowania (ACS),
-
systemy, w których wartość docelowa jest zmieniana według określonego, z góry ustalonego programu. Jest to system zarządzania oprogramowaniem,
-
systemy, w których dana wartość może się znacznie różnić i zgodnie z arbitralnym prawem, tj. systemy śledzenia.