Ogrzewanie i chłodzenie silników elektrycznych
 Prawidłowe określenie mocy silników elektrycznych dla różnych maszyn, mechanizmów i maszyn do obróbki metalu ma ogromne znaczenie. Przy niewystarczającej mocy niemożliwe jest pełne wykorzystanie możliwości produkcyjnych maszyny, przeprowadzenie zaplanowanego procesu technologicznego. Jeśli moc jest niewystarczająca, silnik elektryczny ulegnie przedwczesnej awarii.
Prawidłowe określenie mocy silników elektrycznych dla różnych maszyn, mechanizmów i maszyn do obróbki metalu ma ogromne znaczenie. Przy niewystarczającej mocy niemożliwe jest pełne wykorzystanie możliwości produkcyjnych maszyny, przeprowadzenie zaplanowanego procesu technologicznego. Jeśli moc jest niewystarczająca, silnik elektryczny ulegnie przedwczesnej awarii.
Przeszacowanie mocy silnika elektrycznego prowadzi do jego systematycznego niedoładowania, aw efekcie do niepełnego wykorzystania silnika, jego pracy z niską sprawnością i małym współczynnikiem mocy (dla silników asynchronicznych). Ponadto, gdy moc silnika jest przereklamowana, wzrastają koszty kapitałowe i operacyjne.
Moc wymagana do obsługi maszyny, a co za tym idzie moc wytwarzana przez silnik elektryczny, zmienia się podczas pracy maszyny. Obciążenie silnika elektrycznego można scharakteryzować za pomocą wykresu obciążenia (rys. 1), który jest zależnością mocy z wału silnika, jego momentu obrotowego lub prądu w czasie.Po zakończeniu obróbki przedmiotu maszyna jest zatrzymywana, przedmiot jest mierzony, a przedmiot jest wymieniany. Harmonogram załadunku jest następnie powtarzany ponownie (podczas obróbki części tego samego typu).
Aby zapewnić normalną pracę przy tak zmiennym obciążeniu, silnik elektryczny musi rozwijać najwyższą wymaganą moc podczas przetwarzania i nie przegrzewać się podczas ciągłej pracy zgodnie z tym harmonogramem obciążenia. Dopuszczalne przeciążenie silników elektrycznych jest określone przez ich właściwości elektryczne.
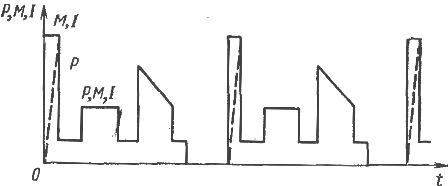
Ryż. 1. Załaduj harmonogram podczas obróbki części tego samego typu
Gdy silnik pracuje, straty energii (i mocy).powodując jego nagrzewanie. Część energii zużywanej przez silnik elektryczny zużywana jest na ogrzewanie jego uzwojeń, na ogrzewanie obwodu magnetycznego histereza oraz prądy wirowe przenoszące tarcie i tarcie powietrza. Nazywa się straty ciepła uzwojeń proporcjonalne do kwadratu prądu zmienny (ΔРtrans)... Pozostałe straty w silniku zależą trochę od jego obciążenia i są konwencjonalnie nazywane stałymi (ΔРpos).
Dopuszczalne nagrzewanie się silnika elektrycznego jest określone przez najmniej żaroodporne materiały jego budowy. Ten materiał jest izolacją jego cewki.
Do izolacji maszyn elektrycznych stosuje się:
• tkaniny bawełniane i jedwabne, przędze, papier i włókniste materiały organiczne nieimpregnowane związkami izolacyjnymi (klasa odporności cieplnej U);
• te same materiały, impregnowane (klasa A);
• syntetyczne folie organiczne (klasa E);
• materiały z azbestu, miki, włókna szklanego ze spoiwami organicznymi (klasa B);
• to samo, ale z syntetycznymi spoiwami i impregnatami (klasa F);
• te same materiały, ale ze spoiwami silikonowymi i impregnatami (klasa H);
• mika, ceramika, szkło, kwarc bez spoiw lub ze spoiwami nieorganicznymi (klasa C).
Klasy izolacji U, A, E, B, F, H dopuszczają odpowiednio temperatury maksymalne 90, 105, 120, 130, 155, 180°C. Graniczna temperatura klasy C przekracza 180°C i jest ograniczona właściwościami użyte materiały.
Przy takim samym obciążeniu silnika elektrycznego jego nagrzewanie będzie nierównomierne w różnych temperaturach otoczenia. Temperatura projektowa t0 otoczenia wynosi 40 ° C. W tej temperaturze określa się wartości mocy znamionowej silników elektrycznych. Wzrost temperatury silnika elektrycznego powyżej temperatury otoczenia nazywa się przegrzaniem:

Rozszerza się zastosowanie izolacji syntetycznej. W szczególności izolacje krzemowo-silikonowe zapewniają wysoką niezawodność maszyn elektrycznych podczas pracy w warunkach tropikalnych.
Ciepło wytwarzane w różnych częściach silnika wpływa na nagrzewanie się izolacji w różnym stopniu. Ponadto pomiędzy poszczególnymi częściami silnika elektrycznego zachodzi wymiana ciepła, której charakter zmienia się w zależności od warunków obciążenia.
Różne nagrzewanie poszczególnych części silnika elektrycznego i przenoszenie ciepła między nimi komplikuje analityczne badanie procesu. Dlatego dla uproszczenia warunkowo zakłada się, że silnik elektryczny jest ciałem jednorodnym termicznie i nieskończenie przewodzącym ciepło. Powszechnie uważa się, że ciepło wydzielane przez silnik elektryczny do otoczenia jest proporcjonalne do przegrzania.W tym przypadku promieniowanie cieplne jest pomijane, ponieważ bezwzględne temperatury ogrzewania silników są niskie. Rozważ proces nagrzewania się silnika elektrycznego przy danych założeniach.
Podczas pracy w silniku elektrycznym ciepło dq wydziela się w czasie dt. Część tego ciepła dq1 jest pochłaniana przez masę silnika elektrycznego, w wyniku czego wzrasta temperatura t i przegrzanie τ silnika. Pozostałe ciepło dq2 jest uwalniane z silnika do otoczenia. W ten sposób można zapisać równość
Wraz ze wzrostem temperatury silnika wzrasta ciepło dq2. Przy określonej wartości przegrzania do otoczenia zostanie oddane tyle ciepła, ile jest uwalniane w silniku elektrycznym; wtedy dq = dq2 i dq1 = 0. Temperatura silnika elektrycznego przestaje rosnąć i przegrzanie osiąga stałą wartość τу.
Przy powyższych założeniach równanie można zapisać następująco:

gdzie Q jest mocą cieplną spowodowaną stratami w silniku elektrycznym, J / s; A — przenoszenie ciepła z silnika, tj. ilość ciepła wydzielanego przez silnik do otoczenia w jednostce czasu przy różnicy temperatur między silnikiem a otoczeniem wynoszącej 1oC, J/s-deg; C to pojemność cieplna silnika, tj. ilość ciepła potrzebna do podniesienia temperatury silnika o 1 ° C, J / deg.
Oddzielając zmienne w równaniu mamy
Całkujemy lewą stronę równości w przedziale od zera do pewnej aktualnej wartości czasu t, a prawą stronę w przedziale od początkowego przegrzania τ0 silnika elektrycznego do aktualnej wartości przegrzania τ:
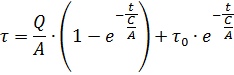
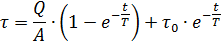
Rozwiązując równanie na τ, otrzymujemy równanie ogrzewania silnika elektrycznego:
Oznaczmy C / A = T i wyznaczmy wymiar tego stosunku:

Ryż. 2. Krzywe charakteryzujące nagrzewanie się silnika elektrycznego
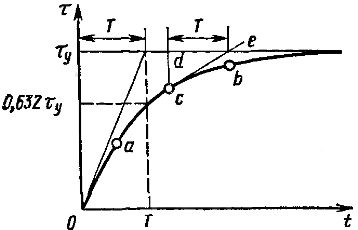
Ryż. 3. Wyznaczanie stałej czasowej grzania
Nazywa się to wielkością T, która ma wymiar stałej czasowej nagrzewania silnika elektrycznego. Zgodnie z tym zapisem równanie ogrzewania można zapisać jako
Jak widać z równania, gdy otrzymamy — ustaloną wartość przegrzania.
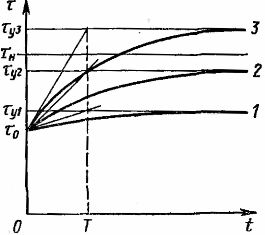
Gdy zmienia się obciążenie silnika elektrycznego, zmienia się wielkość strat, a tym samym wartość Q. Prowadzi to do zmiany wartości τу.
na ryc. 2 przedstawia krzywe grzania 1, 2, 3 odpowiadające ostatniemu równaniu dla różnych wartości obciążenia. Gdy τу przekroczy wartość dopuszczalnego przegrzania τn, ciągła praca silnika elektrycznego jest niedopuszczalna. Jak wynika z równania i wykresów (rys. 2), wzrost przegrzania jest asymptotyczny.
Gdy podstawimy do równania wartość t = 3T, otrzymamy wartość τ, która jest w przybliżeniu tylko o 5% mniejsza niż τy. Zatem w czasie t = 3T proces nagrzewania można praktycznie uznać za zakończony.
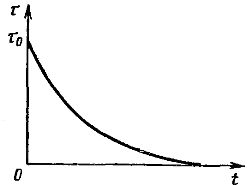
Jeżeli w dowolnym punkcie krzywej grzewczej (rys. 3) poprowadzimy styczną do krzywej grzewczej, następnie poprowadzimy pion przez ten sam punkt, a następnie odcinek de asymptoty, zamknięty między styczną a pionową, na skali osi odciętych jest równa T. Jeśli przyjmiemy Q = 0 w równaniu, otrzymamy równanie chłodzenia silnika:

Krzywa chłodzenia pokazana na rys. 4, odpowiada temu równaniu.
Stała czasowa nagrzewania zależy od wielkości silnika elektrycznego i formy jego zabezpieczenia przed wpływami środowiska. W przypadku otwartych i chronionych silników elektrycznych małej mocy czas nagrzewania wynosi 20-30 minut. W przypadku zamkniętych silników elektrycznych dużej mocy osiąga 2-3 godziny.
Jak wspomniano powyżej, podana teoria nagrzewania się silnika elektrycznego jest przybliżona i oparta na przybliżonych założeniach. Dlatego krzywa grzania zmierzona eksperymentalnie znacznie różni się od teoretycznej. Jeżeli dla różnych punktów doświadczalnej krzywej grzania konstrukcja pokazana na rys. 3 okazuje się, że wartości T rosną wraz ze wzrostem czasu. Dlatego wszystkie obliczenia wykonane zgodnie z równaniem należy traktować jako przybliżone. W obliczeniach tych wskazane jest użycie stałej T wyznaczonej graficznie dla punktu początkowego krzywej grzania. Ta wartość T jest najmniejsza i gdy jest używana, zapewnia pewien margines mocy silnika.
Ryż. 4. Krzywa chłodzenia silnika
Eksperymentalnie zmierzona krzywa chłodzenia różni się od teoretycznej jeszcze bardziej niż krzywa grzania. Stała czasowa chłodzenia odpowiadająca wyłączonemu silnikowi jest znacznie dłuższa niż stała czasowa ogrzewania ze względu na zmniejszoną wymianę ciepła przy braku wentylacji.