Obciążenia statyczne silników głównych mechanizmów dźwignicowych
Moc i moment obrotowy wału silnika wciągnika w statycznym trybie podnoszenia ładunku można obliczyć ze wzorów
gdzie P jest mocą na wale silnika, kW; G to siła wymagana do podniesienia ładunku, N; G0 — siła podnoszenia urządzenia chwytającego, N; M to moment wału silnika, Nm; v to prędkość podnoszenia ładunku, m / s; D to średnica bębna wciągarki holowniczej, m; η — sprawność mechanizmu podnoszącego; i jest przełożeniem skrzyni biegów i wciągnika łańcuchowego.
W trybie opadania silnik żurawia rozwija moc równą różnicy między mocą tarcia Ptr a mocą wynikającą z działania ciężaru opadającego ładunku Pgr:
Podczas opuszczania średnich i ciężkich ładunków energia jest kierowana z wału przekładni do silnika, ponieważ Pgr >> Ptr (zwolnienie hamulca). W tym przypadku moc na wale silnika, kW, będzie wyrażona wzorem

Podczas opuszczania lekkich ładunków lub pustego haka mogą wystąpić przypadki, w których Pgr < Ptr.W tym przypadku silnik pracuje z momentem ruchu (spadek mocy) i rozwija moc, kW,

Na podstawie podanych wzorów można wyznaczyć moc silnika żurawia przy dowolnym obciążeniu haka. Przy obliczaniu należy pamiętać, że sprawność mechanizmu zależy od jego obciążenia (ryc. 1).
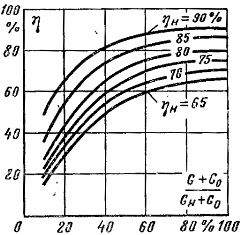
Ryż. 1. Zależność sprawności mechanizmu od obciążenia.
Moc i moment obrotowy na wale silników poziomych mechanizmów ruchu żurawia w statycznym trybie pracy można określić za pomocą wzorów

gdzie P jest mocą wału silnika mechanizmu ruchu dźwigu, kW; M jest momentem wału silnika mechanizmu ruchu, Nm; G — masa przewożonego ładunku, N; G1 — ciężar własny mechanizmu ruchu, N; v — prędkość ruchu, m / s; R to promień koła, m; r jest promieniem szyjki osi koła, m; μ — współczynnik tarcia ślizgowego (μ = 0,08-0,12); f — współczynnik tarcia tocznego, m (f = 0,0005 — 0,001 m); η — sprawność mechanizmu ruchu; k — współczynnik uwzględniający tarcie obrzeży kół o szyny; i — przełożenie reduktora podwozia.
W wielu mechanizmach podnoszących i transportowych ruch nie odbywa się w kierunku poziomym. Możliwy jest również wpływ obciążenia wiatrem itp. Wzór na określenie mocy w tym przypadku można przedstawić jako

Dodatkowo zaznaczono: α — kąt nachylenia prowadnic do płaszczyzny poziomej; F — określone obciążenie wiatrem, N / m2; S to obszar, na który działa ciśnienie wiatru pod kątem 90 °, m2.
W ostatnim wzorze pierwszy człon charakteryzuje moc na wale silnika potrzebną do pokonania tarcia podczas ruchu poziomego; drugi człon odpowiada sile nośnej, trzeci to składowa mocy z obciążenia wiatrem.
Wiele dźwigów ma obrotnicę, na której znajduje się sprzęt roboczy. Ruch platformy przenoszony jest przez zamontowane na niej koło zębate (obrotnica) o średnicy Dkp. Pomiędzy platformą a podstawą stałą znajdują się rolki (rolki) o średnicy dp. W tym przypadku moc i moment obrotowy silnika żurawia wywołane siłami tarcia znajdują się podobnie jak w przypadku ruchu posuwisto-zwrotnego, a mianowicie:

Tutaj oprócz znanych wartości: G2 to waga gramofonu z całym wyposażeniem, N; ωl — prędkość kątowa, platformy, rad/s; w — przełożenie przekładni mechanizmu wahadłowego i przekładni napędowej — obrotnica.

Przy określaniu mocy napędu elektrycznego żurawia w niektórych przypadkach konieczne jest uwzględnienie zmiany obciążenia podczas pracy na zboczu. Obciążenie wiatrem mechanizmów obrotowych określa się, biorąc pod uwagę różnicę sił wiatru działających na ładunek, wysięgnik żurawia i przeciwwagę.
Przy projektowaniu napędów elektrycznych mechanizmów dźwignicowych na końcu doboru silnika sprawdza się napęd elektryczny pod kątem dopuszczalnych wartości przyspieszeń, których dane podano w tabeli 1
Tabela 1 Nazwy mechanizmów i ich przeznaczenie
Nazwa mechanizmów i ich przeznaczenie Przyspieszenie, m / s2 Mechanizmy podnoszące przeznaczone do podnoszenia płynnych metali, delikatnych przedmiotów, produktów, różnych prac montażowych 0,1 Mechanizmy podnoszące parków montażowych i warsztatów metalurgicznych 0,2 — 0,5 Mechanizmy podnoszące dźwigów chwytających 0,8 Mechanizmy do ruch dźwigów przeznaczonych do precyzyjnych prac montażowych i transportu płynnych metali, delikatnych przedmiotów 0,1 - 0,2 Mechanizmy ruchu z siłą przyciągania grawitacyjnego przy pełnym obciążeniu 0,2 - 0,7 Wózki dźwigowe z pełną przyczepnością 0,8 — 1,4 Obroty żurawia 0,5 — 1,2