Charakterystyki mechaniczne napędów elektrycznych
 O wyborze napędu elektrycznego decydują wymagania maszyny roboczej. Napęd elektryczny musi zapewniać wykonywanie przez maszynę roboczą określonej technologii we wszystkich możliwych trybach: rozruch, przyjmowanie i rozładowywanie obciążenia, zatrzymywanie, zmiana prędkości, stałe obciążenie. Charakter tych trybów zależy głównie od właściwości mechanicznych silnika i maszyny roboczej... Jednym z głównych kryteriów oceny właściwości mechanicznych zarówno silnika, jak i maszyny roboczej jest ich charakterystyka mechaniczna.
O wyborze napędu elektrycznego decydują wymagania maszyny roboczej. Napęd elektryczny musi zapewniać wykonywanie przez maszynę roboczą określonej technologii we wszystkich możliwych trybach: rozruch, przyjmowanie i rozładowywanie obciążenia, zatrzymywanie, zmiana prędkości, stałe obciążenie. Charakter tych trybów zależy głównie od właściwości mechanicznych silnika i maszyny roboczej... Jednym z głównych kryteriów oceny właściwości mechanicznych zarówno silnika, jak i maszyny roboczej jest ich charakterystyka mechaniczna.
Charakterystyki mechaniczne silników elektrycznych
Charakterystyką mechaniczną silnika elektrycznego jest zależność prędkości obrotowej wału od momentu obrotowego wytwarzanego przez silnik ω=φ(Md) lub n = e(Md) gdzie ω — prędkość kątowa wału, rad / sec, n — prędkość obrotowa wału, obr./min
Charakterystykę mechaniczną silnika nazywa się naturalną zależnością n = f (M) uzyskuje się przy nominalnych parametrach sieci elektroenergetycznej, normalnym schemacie połączeń i bez dodatkowych rezystancji w obwodzie elektrycznym.
Jeżeli występują dodatkowe rezystancje lub silnik jest zasilany z sieci o napięciu lub częstotliwości innej niż nominalna, to charakterystykę mechaniczną silnika nazwiemy sztuczną... Oczywiście silnik ma nieskończoną ilość charakterystyk sztucznych i tylko jeden naturalny.
Większość silników elektrycznych pod obciążeniem zmniejsza prędkość wraz ze wzrostem momentu obrotowego. Nazywa się w tym przypadku charakterystykę opadanie... Stopień zmiany prędkości obrotowej silnika wraz ze zmianą momentu obrotowego szacuje się na podstawie tzw. sztywności charakterystyk mechanicznych, którą określa stosunek α = ΔM / Δω lub α = ΔM / Δn
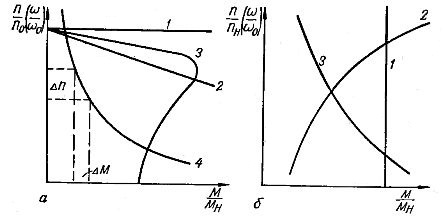
Ryż. 1. Różne typy charakterystyk mechanicznych: a — silniki elektryczne, b — maszyny produkcyjne.
Wartości zmiany momentu i szybkości spadku przy wyznaczaniu sztywności są zwykle przyjmowane w jednostkach względnych. Umożliwia to porównanie charakterystyk różnych typów silników.
W zależności od stopnia sztywności wszystkie właściwości mechaniczne silników są podzielone na następujące grupy.
1. Absolutnie ciężkie działanie przy wartości sztywności α = ∞… Silniki synchroniczne mają takie właściwości mechaniczne (krzywa 1, ryc. 1, a) przy ściśle stałej prędkości obrotowej.
2. Stałe charakterystyki ze stosunkowo niewielkim spadkiem prędkości wraz ze wzrostem momentu obrotowego i α = 40 — 10.Do tej grupy należą charakterystyki naturalne silników prądu stałego o wzbudzeniu niezależnym (krzywa 2) oraz charakterystyki silników indukcyjnych w przekroju liniowym (krzywa 3).
3. Miękkie charakterystyki mechaniczne z dużym względnym spadkiem prędkości wraz ze wzrostem momentu obrotowego i sztywnością do α = 10. Takie charakterystyki mają silniki prądu stałego ze wzbudzeniem szeregowym (krzywa 4), silniki ze wzbudzeniem niezależnym o dużej rezystancji twornika oraz silniki asynchroniczne z dodatkowymi rezystancjami w obwodzie wirnika.
Podczas pracy napędu elektrycznego, aby pokonać opory pracującej maszyny, silnik musi rozwinąć określony moment. Dlatego przy wyborze silnika należy najpierw określić zgodność właściwości silnika i pracującej maszyny.

Charakterystyki mechaniczne maszyn roboczych
Charakterystyka mechaniczna maszyny roboczej to zależność momentu statycznego oporu maszyny od prędkości obrotowej wału napędowego. Dla wygody konstrukcji złącza, zależność ta jest zwykle wyrażana w taki sam sposób, jak charakterystyka silnika, w postaci ω=φ(Ms -Ms) lub n =e(Miss).
Moment oporu statycznego Ms, w skrócie moment statyczny, to moment oporu, jaki tworzy maszyna na wale napędowym w trybie statycznym (stacjonarnym), gdy prędkość nie zmienia się.
Charakterystykę mechaniczną maszyny można uzyskać empirycznie lub obliczeniowo, jeżeli znany jest rozkład sił lub momentów statycznych na elementach schematu kinematycznego.Momenty statyczne maszyn mogą zależeć nie tylko od prędkości, ale także od innych wielkości, dlatego w praktycznych obliczeniach napędów elektrycznych konieczne jest rozpatrywanie każdego przypadku z osobna.
Momenty statyczne różnych maszyn roboczych dzielą się na grupy ze względu na charakter ich zależności od prędkości (charakterystyki mechaniczne). Najczęstsze w praktyce są następujące.
1. Moment statyczny zależy w niewielkim stopniu lub praktycznie nie zależy od prędkości (krzywa 1, ryc. 2, b). Takie cechy mają mechanizmy podnoszące, dźwigi, wciągarki, wciągniki, a także przenośniki taśmowe pod stałym obciążeniem.
2. Moment statyczny maszyny rośnie proporcjonalnie do kwadratu prędkości (krzywa 2). Ta charakterystyka, charakterystyczna dla wentylatorów osiowych, nazywana jest charakterystyką wentylatora i przedstawiana analitycznie w postaci wzoru: Mc = Mo + kn2, gdzie Mo jest początkowym momentem statycznym, najczęściej wywołanym siłami tarcia, które zwykle nie zależy od prędkości, k jest współczynnikiem doświadczalnym. Oprócz wentylatorów, pompy odśrodkowe i wirowe, separatory, wirówki, śmigła, turbosprężarki i obracające się koła pasowe bębna mają charakterystykę wentylatora.
3. Moment statyczny maleje wraz ze wzrostem prędkości (krzywa 3). Ta grupa obejmuje charakterystykę niektórych mechanizmów przenośnikowych i niektórych maszyn do cięcia metalu.
4. Moment statyczny zmienia się wraz z prędkością niejednoznacznie, z ostrym przejściem wynikającym ze specyfiki procesu technologicznego. Cechą charakterystyczną tej grupy są maszyny pracujące z częstymi dużymi przeciążeniami, które czasami prowadzą do całkowitego zatrzymania.Np. mechanizm czerpakowy do koparki jednonaczyniowej, przenośnika zgrzebłowego, pracujący pod blokowaniem transportowanej masy, kruszarki i inne maszyny.
Oprócz wymienionych, w praktyce istnieją inne rodzaje właściwości mechanicznych maszyn, na przykład pompy tłokowe i sprężarki, których momenty statyczne zależą od ścieżki.