Tyrystorowy napęd elektryczny
 W przemyśle szeroko stosowane są siłowniki ze sterowanymi zaworami półprzewodnikowymi - tyrystorami. Tyrystory są produkowane dla prądów do setek amperów, dla napięć do 1000 woltów lub więcej. Wyróżniają się wysoką wydajnością, stosunkowo niewielkimi rozmiarami, dużą prędkością obrotową oraz możliwością pracy w szerokim zakresie temperatur otoczenia (od -60 do +60°C).
W przemyśle szeroko stosowane są siłowniki ze sterowanymi zaworami półprzewodnikowymi - tyrystorami. Tyrystory są produkowane dla prądów do setek amperów, dla napięć do 1000 woltów lub więcej. Wyróżniają się wysoką wydajnością, stosunkowo niewielkimi rozmiarami, dużą prędkością obrotową oraz możliwością pracy w szerokim zakresie temperatur otoczenia (od -60 do +60°C).
Tyrystor nie jest urządzeniem w pełni sterowalnym, które jest włączane przez przyłożenie odpowiedniego potencjału do elektrody sterującej, a wyłączane jest tylko przez wymuszone przerwanie obwodu prądowego spowodowane napięciem przerywającym, jego naturalne przejście przez zero lub podanie tłumienia napięcie o przeciwnym znaku. Zmieniając czas podawania napięcia sterującego (jego opóźnienie) można regulować średnią wartość napięcia wyprostowanego, a tym samym prędkość obrotową silnika.
Średnia wartość napięcia wyprostowanego przy braku regulacji jest określana głównie przez obwód przełączający przetwornicy tyrystorowej. Obwody przetworników dzielą się na dwie klasy: zerowe i zmostkowane.
W instalacjach średniej i dużej mocy stosowane są głównie układy przekształtników mostkowych, które głównie z dwóch powodów:
-
mniejsze napięcie na każdym z tyrystorów,
-
brak stałej składowej prądu płynącej przez uzwojenia transformatora.
Obwody przetwornic mogą różnić się także liczbą faz: od jednej w instalacjach małej mocy do 12 — 24 w przetwornicach dużej mocy.
Wszystkie warianty przekształtników tyrystorowych wraz z pozytywnymi właściwościami, takimi jak mała bezwładność, brak elementów wirujących, mniejsze (w porównaniu z przekształtnikami elektromechanicznymi) rozmiary, mają szereg wad:
1. Twarde podłączenie do sieci: wszystkie wahania napięcia w sieci przenoszone są bezpośrednio do układu napędowego i wzrasta obciążenie, osie silnika są natychmiast przekazywane do sieci i powodują udary prądowe.
2. Niski współczynnik mocy przy obniżaniu napięcia.
3. Generowanie wyższych harmonicznych, obciążenie sieci elektroenergetycznej.
Charakterystykę mechaniczną silnika napędzanego przez przekształtnik tyrystorowy determinuje napięcie przyłożone do twornika oraz charakter jego zmian wraz z obciążeniem, czyli charakterystyka zewnętrzna przekształtnika oraz parametry przekształtnika i silnika.
Urządzenie i zasada działania tyrystora
Tyrystor (ryc. 1, a) jest czterowarstwowym krzemowym półprzewodnikiem z dwoma złączami pn i jednym złączem n-p. Wielkość prądu Azprzepływanie przez tyrystor pod działaniem napięcia anodowego Ua zależy od prądu Az podczas sterowania przechodzącego przez elektrodę sterującą pod działaniem napięcia sterującego Uy.
Jeśli nie ma prądu sterującego (Azy = 0), to wraz ze wzrostem napięcia U prąd A w obwodzie użytkownika P będzie wzrastał, pozostając jednak bardzo małą wartością (ryc. 1, b).

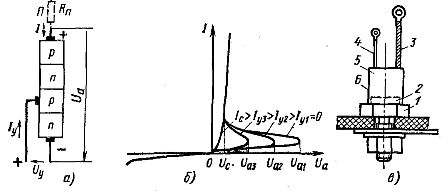
Ryż. 1. Schemat blokowy (a), charakterystyka prądowo-napięciowa (b) i budowa (c) tyrystora
W tym czasie złącze n-p włączone w kierunku nieprzewodzącym ma dużą rezystancję. Przy określonej wartości Ua1 napięcia anodowego, zwanego napięciem otwarcia, zapłonu lub przełączania, następuje lawinowe przebicie warstwy blokującej, jej rezystancja maleje, a natężenie prądu wzrasta do wartości określonej zgodnie z prawem Ohma rezystancją Rp użytkownika P.
Wraz ze wzrostem prądu Iu napięcie Ua maleje. Prąd Iu, przy którym napięcie Ua osiąga najniższą wartość, nazywany jest prądem I z poprawką.
Tyrystor zamyka się po usunięciu napięcia Ua lub zmianie jego znaku. Prąd znamionowy I tyrystora jest największą średnią wartością prądu płynącego w kierunku do przodu, który nie powoduje niedopuszczalnego przegrzania.
Napięcie znamionowe Un nazywane jest najwyższym dopuszczalnym napięciem amplitudowym, przy którym zapewniona jest dana niezawodność urządzenia.
Spadek napięcia ΔUnwywołany przez prąd znamionowy nazywany jest nominalnym spadkiem napięcia (zwykle ΔUn = 1 — 2 V).
Wartość natężenia prądu Ic korekcji waha się w granicach 0,1 — 0,4 A przy napięciu Uc 6 — 8 V.
Tyrystor niezawodnie otwiera się z czasem trwania impulsu 20 — 30 μs. Odstęp między impulsami nie powinien być mniejszy niż 100 μs. Gdy napięcie Ua spadnie do zera, tyrystor wyłącza się.
Zewnętrzna konstrukcja tyrystora pokazano na ryc.1, v… Na bazie miedzi 1 szesnasta krzemowa struktura czterowarstwowa 2 z gwintowanym ogonem, z mocą ujemną 3 i kontrolą 4 wyjść. Silikonowa konstrukcja jest chroniona cylindryczną metalową obudową 5. Izolator jest zamocowany w obudowie 6. Gwint w podstawie 1 służy do zamontowania tyrystora i podłączenia źródła napięcia anodowego do bieguna dodatniego.
Wraz ze wzrostem napięcia Ua zmniejsza się prąd sterujący wymagany do otwarcia tyrystora (patrz ryc. 1, b). Prąd otwarcia sterowania jest proporcjonalny do napięcia otwarcia sterowania uyo.
Jeśli Uа zmienia się zgodnie z prawem sinusoidalnym (ryc. 2), to wymagane napięcie i otwarcie 0 można przedstawić linią przerywaną. Jeżeli przyłożone napięcie sterujące Uy1 jest stałe i jego wartość jest mniejsza od minimalnej wartości napięcia uuo, to tyrystor nie otwiera się.
Jeśli napięcie sterujące zostanie zwiększone do wartości Uy2, tyrystor otworzy się, gdy tylko napięcie Uy2 stanie się większe od napięcia uyo. Zmieniając wartość uu, można zmienić kąt otwarcia tyrystora w zakresie od 0 do 90°.
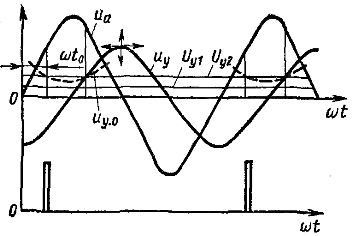
Ryż. 2. Sterowanie tyrystorowe
Aby otworzyć tyrystor pod kątem powyżej 90 °, stosuje się zmienne napięcie sterujące uy, które zmienia się na przykład sinusoidalnie. Przy napięciu odpowiadającym przecięciu fali sinusoidalnej tego napięcia z krzywą przerywaną uuo = f (ωt) tyrystor otwiera się.
Przesuwając sinusoidę uyo poziomo w prawo lub w lewo, można zmienić kąt otwarcia tyrystora ωt0. To sterowanie kątem otwarcia nazywa się poziomym. Odbywa się to za pomocą specjalnych przełączników faz.
Przesuwając tę samą falę sinusoidalną pionowo w górę lub w dół, możesz również zmienić kąt otwarcia. Takie zarządzanie nazywa się pionowym. W takim przypadku przy zmiennym sterowaniu napięciem tyy dodaj algebraicznie stałe napięcie, na przykład napięcie Uy1... Kąt otwarcia reguluje się poprzez zmianę wielkości tego napięcia.
Po otwarciu tyrystor pozostaje otwarty do końca dodatniego półcyklu, a napięcie sterujące nie wpływa na jego działanie. Umożliwia to również zastosowanie sterowania impulsowego poprzez okresowe stosowanie impulsów dodatniego napięcia sterującego w odpowiednim czasie (ryc. 2 na dole). Zwiększa to przejrzystość sterowania.
Zmieniając kąt otwarcia tyrystora w taki czy inny sposób, można przykładać do użytkownika impulsy napięcia o różnych kształtach. Powoduje to zmianę wartości średniego napięcia na zaciskach użytkownika.
Do sterowania tyrystorami stosuje się różne urządzenia. Na schemacie pokazanym na ryc. 3 napięcie sieciowe prądu przemiennego podawane jest na uzwojenie pierwotne transformatora Tp1.
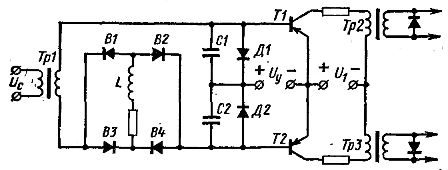
Ryż. 3. Tyrystorowy obwód sterujący
W obwodzie wtórnym tego transformatora znajduje się prostownik pełnookresowy B.1, B2, B3, B4 o znacznej indukcyjności L w obwodzie prądu stałego. Praktyczny prąd falowy jest praktycznie wyeliminowany. Ale taki prąd stały można uzyskać tylko przez pełnookresowe prostowanie prądu przemiennego o postaci pokazanej na ryc. 4, A.
Zatem w tym przypadku prostownik B1, B2, B3, B4 (patrz ryc. 3) jest konwerterem w postaci prądu przemiennego. Na tym schemacie kondensatory C1 i C2 naprzemiennie szeregowo z prostokątnymi impulsami prądu (ryc. 4, a).W tym przypadku na płytkach kondensatorów C1 i C2 (ryc. 4, b) powstaje poprzeczne napięcie piłokształtne, przyłożone do podstaw tranzystorów T1 i T2 (patrz ryc. 3).
Napięcie to nazywane jest napięciem odniesienia. Napięcie stałe Uy działa również w obwodzie głównym każdego tranzystora. Kiedy napięcie piły wynosi zero, napięcie Uy tworzy dodatnie potencjały na podstawach obu tranzystorów. Każdy tranzystor otwiera się prądem bazy przy ujemnym potencjale bazy.
Dzieje się tak, gdy ujemne wartości napięcia odniesienia piły okazują się większe niż Uy (ryc. 4, b). Warunek ten jest spełniony w zależności od wartości Uy przy różnych wartościach kąta fazowego. W tym przypadku tranzystor otwiera się na różne okresy czasu, w zależności od wielkości napięcia Uy.
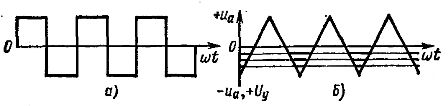
Ryż. 4. Schematy napięć sterujących tyrystorami
Kiedy jeden lub drugi tranzystor otwiera się, prostokątny impuls prądu przechodzi przez uzwojenie pierwotne transformatora Tr2 lub Tr3 (patrz ryc. 3). Kiedy przednia krawędź tego impulsu przechodzi, w uzwojeniu wtórnym pojawia się impuls napięcia, który jest przykładany do elektrody sterującej tyrystora.
Kiedy tył impulsu prądu przechodzi przez uzwojenie wtórne, pojawia się impuls napięcia o przeciwnej biegunowości. Impuls ten jest zamykany przez diodę półprzewodnikową, która omija uzwojenie wtórne i nie jest doprowadzana do tyrystora.
Gdy tyrystory są sterowane (patrz ryc. 3) za pomocą dwóch transformatorów, generowane są dwa impulsy przesunięte fazowo o 180 °.
Układy sterowania silnikami tyrystorowymi
W tyrystorowych układach sterowania silnikami prądu stałego zmiana napięcia twornika prądu stałego silnika służy do sterowania jego prędkością. W takich przypadkach zwykle stosuje się wielofazowe schematy rektyfikacji.
na ryc. 5, a najprostszy schemat tego rodzaju jest pokazany linią ciągłą. W tym obwodzie każdy z tyrystorów T1, T2, T3 jest połączony szeregowo z uzwojeniem wtórnym transformatora i zworą silnika; NS. itp. c. uzwojenia wtórne są poza fazą. Dlatego impulsy napięcia, które są przesunięte względem siebie w fazie, są przykładane do twornika silnika podczas sterowania kątem otwarcia tyrystorów.
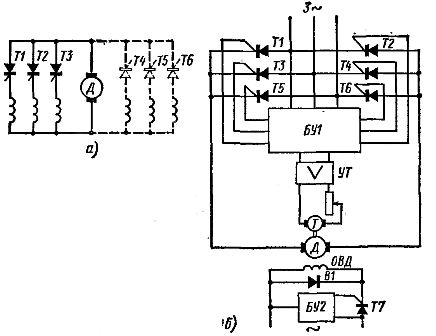
Ryż. 5. Obwody napędu tyrystorowego
W obwodzie wielofazowym przez twornik silnika mogą przepływać prądy przerywane i ciągłe, w zależności od wybranego kąta zapłonu tyrystorów. Odwracalny napęd elektryczny (ryc. 5, a, cały obwód) wykorzystuje dwa zestawy tyrystorów: T1, T2, T3 i T4, T5, T6.
Otwierając tyrystory określonej grupy, zmieniają kierunek prądu w tworniku silnika elektrycznego i odpowiednio kierunek jego obrotu.
Odwrócenie silnika można również uzyskać poprzez zmianę kierunku prądu w uzwojeniu wzbudzenia silnika. Takie odwrócenie stosuje się w przypadkach, gdy nie jest wymagana duża prędkość, ponieważ uzwojenie wzbudzenia ma bardzo dużą indukcyjność w porównaniu z uzwojeniem twornika. Taki skok wsteczny jest często stosowany w tyrystorowych napędach ruchu głównego maszyn do cięcia metalu.
Drugi zestaw tyrystorów umożliwia również realizację trybów hamowania wymagających zmiany kierunku prądu w tworniku silnika elektrycznego.Tyrystory w rozpatrywanych obwodach napędowych służą do włączania i wyłączania silnika oraz ograniczania prądów rozruchu i hamowania, eliminując konieczność stosowania styczników, a także reostatów rozruchu i hamowania.
W tyrystorowych układach napędowych prądu stałego niepożądany jest transformator mocy, który zwiększa gabaryty i koszt instalacji, dlatego często stosuje się układ pokazany na rys. 5 B.
W tym obwodzie zapłon tyrystora jest kontrolowany przez jednostkę sterującą BU1. Jest podłączony do sieci prądu trójfazowego, zapewniając w ten sposób zasilanie i dopasowując fazy impulsów sterujących do napięcia anodowego tyrystorów.
Napęd tyrystorowy zwykle wykorzystuje sprzężenie zwrotne prędkości silnika. W tym przypadku stosuje się tachogenerator T i pośredni wzmacniacz tranzystorowy UT. Używana jest również informacja zwrotna e-mail. itp. c. silnik elektryczny, realizowany przez jednoczesne działanie ujemnego sprzężenia zwrotnego na napięcie i dodatniego sprzężenia zwrotnego na prąd twornika.
Do regulacji prądu wzbudzenia stosuje się tyrystor T7 z jednostką sterującą BU2. Przy ujemnych półcyklach napięcia anodowego, gdy tyrystor T7 nie przepuszcza prądu, prąd w OVD nadal płynie z powodu e. itp. c. samozaindukowanie, zamykanie przez zawór obejściowy B1.
Tyrystorowe napędy elektryczne z regulacją szerokości impulsu
W rozważanych napędach tyrystorowych silnik zasilany jest impulsami napięcia o częstotliwości 50 Hz. Aby zwiększyć szybkość odpowiedzi, zaleca się zwiększenie częstotliwości pulsowania.Osiąga się to w napędach tyrystorowych z regulacją szerokości impulsu, gdzie prostokątne impulsy prądu stałego o różnym czasie trwania (szerokości geograficznej) z częstotliwością do 2-5 kHz przechodzą przez twornik silnika. Oprócz szybkiej reakcji, takie sterowanie zapewnia duży zakres regulacji prędkości silnika i wyższą wydajność energetyczną.
Przy sterowaniu szerokością impulsu silnik jest zasilany przez niesterowany prostownik, a tyrystor połączony szeregowo ze zworą jest okresowo zamykany i otwierany. W tym przypadku impulsy prądu stałego przechodzą przez obwód twornika silnika. Zmiana czasu trwania (szerokości geograficznej) tych impulsów powoduje zmianę prędkości obrotowej silnika elektrycznego.
Ponieważ w tym przypadku tyrystor działa przy stałym napięciu, do jego zamknięcia stosuje się specjalne obwody. Jeden z najprostszych schematów sterowania szerokością impulsu pokazano na ryc. 6.
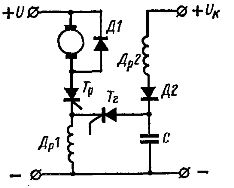
Ryż. 6. Tyrystorowy napęd elektryczny z regulacją szerokości impulsu
W tym obwodzie tyrystor Tr jest wyłączany, gdy tyrystor tłumiący Tr jest włączony. Kiedy ten tyrystor się otwiera, naładowany kondensator C rozładowuje się do przepustnica Dr1, tworząc znaczące e. itp. c. W tym przypadku na końcach dławika pojawia się napięcie większe od napięcia U prostownika i skierowane w jego stronę.
Poprzez prostownik i diodę bocznikową D1 napięcie to jest przykładane do tyrystora Tr i powoduje jego wyłączenie. Po wyłączeniu tyrystora kondensator C jest ponownie ładowany do napięcia przełączania Uc > U.
Ze względu na zwiększoną częstotliwość impulsów prądowych oraz bezwładność twornika silnika, impulsowy charakter zasilania praktycznie nie przekłada się na płynność obrotów silnika. Tyrystory Tr i Tr są otwierane przez specjalny obwód przesunięcia fazowego, który umożliwia zmianę szerokości impulsu.
Przemysł elektryczny produkuje różne modyfikacje w pełni regulowanych tyrystorowych napędów prądu stałego. Wśród nich są napędy z zakresami regulacji prędkości 1:20; 1: 200; 1:2000 przez zmianę napięcia, napędy nieodwracalne i odwracalne, z elektrycznym hamowaniem i bez. Sterowanie odbywa się za pomocą tranzystorowych urządzeń impulsowo-fazowych. Napędy wykorzystują ujemne sprzężenie zwrotne dotyczące prędkości obrotowej silnika i np. licznika itp. z
Zaletami napędów tyrystorowych są wysoka charakterystyka energetyczna, małe rozmiary i waga, brak jakichkolwiek maszyn wirujących poza silnikiem elektrycznym, duża prędkość i stała gotowość do pracy.Główną wadą napędów tyrystorowych jest ich wciąż wysoki koszt, znacznie przekraczający koszt napędów z maszyną elektryczną i wzmacniaczami magnetycznymi.
Obecnie istnieje stała tendencja do powszechnego zastępowania tyrystorowych napędów prądu stałego napędy prądu przemiennego o zmiennej częstotliwości.