Charakterystyki mechaniczne silnika indukcyjnego przy różnych trybach, napięciach i częstotliwościach
 Charakterystykę mechaniczną silników indukcyjnych można wyrazić jako n = f (M) lub n=e(I). Jednak charakterystyki mechaniczne silników asynchronicznych są często wyrażane w postaci zależności M = f(S), gdzie C — poślizg, S = (nc-n) / nc, gdzie ns — prędkość synchroniczna.
Charakterystykę mechaniczną silników indukcyjnych można wyrazić jako n = f (M) lub n=e(I). Jednak charakterystyki mechaniczne silników asynchronicznych są często wyrażane w postaci zależności M = f(S), gdzie C — poślizg, S = (nc-n) / nc, gdzie ns — prędkość synchroniczna.
W praktyce do graficznej konstrukcji charakterystyk mechanicznych stosuje się uproszczony wzór zwany wzorem Klossa:

tutaj: Mk — krytyczna (maksymalna) wartość momentu obrotowego. Ta wartość momentu odpowiada poślizgowi krytycznemu

gdzie λm = Mk / Mn
Wzór Klossa służy do rozwiązywania problemów związanych z napędem elektrycznym realizowanym za pomocą silnika indukcyjnego. Korzystając ze wzoru Klossa, możesz zbudować wykres właściwości mechanicznych zgodnie z danymi paszportowymi silnika indukcyjnego. W praktycznych obliczeniach przy określaniu krytycznego momentu przed pierwiastkiem należy wziąć pod uwagę tylko znak plus.
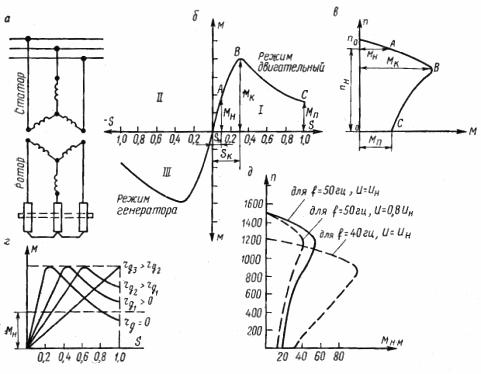
Ryż. 1.Silnik asynchroniczny: a — schemat ideowy, b — charakterystyka mechaniczna M = f (S) — naturalna w trybie silnikowym i prądnicowym, c — naturalna charakterystyka mechaniczna n = f (M) w trybie silnikowym, d — charakterystyka mechaniczna sztucznego reostatu, e — właściwości mechaniczne dla różnych napięć i częstotliwości.

Silnik indukcyjny klatkowy
Jak widać z rys. 1, charakterystyka mechaniczna silnika indukcyjnego zlokalizowanego w ćwiartce I i III. Część krzywej w I kwadrancie odpowiada dodatniej wartości poślizgu i charakteryzuje tryb pracy silnika asynchronicznego, aw III kwadrancie tryb generatorowy. Tryb silnika ma największe znaczenie praktyczne.
Wykres charakterystyki mechanicznej trybu silnika zawiera trzy charakterystyczne punkty: A, B, C i można go warunkowo podzielić na dwie sekcje: OB i BC (ryc. 1, c).
Punkt A odpowiada nominalnemu momentowi obrotowemu silnika i jest określony wzorem Mn = 9,55•103•(Strn /nn)
Ta chwila odpowiada poślizg nominalny, która dla silników ogólnego zastosowania przemysłowego przyjmuje wartość w przedziale od 1 do 7%, czyli Sn = 1 — 7%. Jednocześnie małe silniki mają większy poślizg, a duże mniej.
Silniki o wysokim poślizgu przeznaczone do obciążeń udarowych mają Сn~15%. Należą do nich na przykład silniki prądu przemiennego z pojedynczą serią.
Punkt C charakterystyki odpowiada początkowej wartości momentu obrotowego występującego na wale silnika podczas rozruchu. Ten moment Mp nazywany jest początkowym lub początkowym. W tym przypadku poślizg jest równy jedności, a prędkość wynosi zero. Moment rozruchowy łatwo to ustalić na podstawie danych z tabeli referencyjnej, która pokazuje stosunek momentu rozruchowego do nominalnego Mp / Mn.
Wielkość momentu rozruchowego przy stałych wartościach napięcia i częstotliwości prądu zależy od rezystancji czynnej w obwodzie wirnika. W tym przypadku początkowo wraz ze wzrostem rezystancji czynnej wzrasta wartość momentu rozruchowego, osiągając maksimum, gdy rezystancja czynna obwodu wirnika jest równa całkowitej rezystancji indukcyjnej silnika. Następnie, wraz ze wzrostem rezystancji czynnej wirnika, wartość początkowego momentu obrotowego maleje, dążąc do zera w granicy.
Punkt C (rys. 1, b i c) odpowiada maksymalnemu momentowi, który może rozwinąć silnik w całym zakresie obrotów od n = 0 do n = ns... Moment ten nazywany jest momentem krytycznym (lub wywracającym) Mk . Moment krytyczny odpowiada również poślizgowi krytycznemu Sk. Im mniejsza wartość poślizgu krytycznego Sk, a także wartość poślizgu nominalnego Сn, tym większa sztywność właściwości mechanicznych.
Momenty początkowe i krytyczne określane są przez momenty nominalne. Według GOST dla maszyn elektrycznych z silnikiem klatkowym musi być spełniony warunek Mn / Mn = 0,9 - 1,2, Mk / Mn = 1,65 - 2,5.
Należy zauważyć, że wartość momentu krytycznego nie zależy od rezystancji czynnej obwodu wirnika, natomiast poślizg krytyczny Сk jest wprost proporcjonalny do tej rezystancji.Oznacza to, że wraz ze wzrostem czynnej rezystancji obwodu wirnika wartość momentu krytycznego pozostaje niezmieniona, ale maksimum krzywej momentu obrotowego przesuwa się na rosnące wartości poślizgu (ryc. 1, d).
Wielkość krytycznego momentu obrotowego jest wprost proporcjonalna do kwadratu napięcia przyłożonego do stojana i odwrotnie proporcjonalna do kwadratu częstotliwości napięć i częstotliwości prądu w stojanie.
Jeżeli np. napięcie dostarczane do silnika jest równe 85% wartości znamionowej, to wielkość momentu krytycznego wyniesie 0,852 = 0,7225 = 72,25% momentu krytycznego przy napięciu znamionowym.
Przy zmianie częstotliwości obserwuje się coś przeciwnego. Jeżeli, na przykład, do silnika przeznaczonego do pracy z prądem o częstotliwości = 60 Hz, doprowadzony zostanie prąd o częstotliwości = 50 Hz, to moment krytyczny nadejdzie przy (60/50)2=1,44 razy większym niż oficjalna wartość jego częstotliwości (ryc. 1, e).
Moment krytyczny charakteryzuje chwilową przeciążalność silnika, czyli pokazuje, jaki moment (w ciągu kilku sekund) przeciążenia silnik jest w stanie wytrzymać bez żadnych szkodliwych konsekwencji.

Sekcja charakterystyki mechanicznej od zera do wartości maksymalnej (krytycznej) (patrz ryc. 1, biv) nazywana jest stabilną częścią charakterystyki, a sekcja BC (ryc. 1, c) — częścią niestabilną.
Podział ten tłumaczy się tym, że na rosnącej części charakterystyki OF wraz ze wzrostem poślizgu, tj. wraz ze spadkiem prędkości wzrasta moment obrotowy wytwarzany przez silnik.Oznacza to, że wraz ze wzrostem obciążenia, czyli wzrostem momentu hamowania, prędkość obrotowa silnika maleje, a moment przez niego zwiększony rośnie. Przeciwnie, gdy obciążenie maleje, prędkość wzrasta, a moment obrotowy maleje. Wraz ze zmianą obciążenia w całym zakresie stabilnej części charakterystyki zmieniają się prędkość obrotowa i moment obrotowy silnika.
Silnik nie może rozwinąć więcej niż krytyczny moment obrotowy, a jeśli moment hamowania jest większy, silnik musi nieuchronnie się zatrzymać. Jak to mówią, zdarza się przewrócenie silnika.
Charakterystykę mechaniczną przy stałych U i I oraz braku dodatkowej rezystancji w obwodzie wirnika nazywamy charakterystyką naturalną (charakterystyka silnika indukcyjnego klatkowego z uzwojonym wirnikiem bez dodatkowej rezystancji w obwodzie wirnika). Charakterystyki sztuczne lub reostatyczne nazywane są tymi, które odpowiadają dodatkowej rezystancji w obwodzie wirnika.
Wszystkie wartości momentu rozruchowego są różne i zależą od czynnej rezystancji obwodu wirnika. Suwaki o różnych wielkościach odpowiadają temu samemu nominalnemu momentowi obrotowemu Mn. Wraz ze wzrostem rezystancji obwodu wirnika zwiększa się poślizg, a tym samym zmniejsza się prędkość silnika.
Dzięki uwzględnieniu w obwodzie wirnika rezystancji czynnej, charakterystyka mechaniczna w części stabilnej jest rozciągnięta w kierunku narastającego poślizgu, proporcjonalnego do rezystancji.Oznacza to, że prędkość silnika zaczyna się znacznie zmieniać w zależności od obciążenia wału, a twarda charakterystyka staje się miękka.