Dobór asynchronicznego silnika elektrycznego do pracy w trybie hamowania dynamicznego przez samowzbudzenie
 Asynchroniczny silnik elektryczny z uzwojonym wirnikiem o najprostszym schemacie sterowania — włączenie rezystancji do obwodu wirnika ma wyjątkowo niskie właściwości regulacyjne. Dlatego przed pojawieniem się na rynku przetwornic częstotliwości opracowano różne schematy uzyskiwania zmniejszonej prędkości w trybie obniżania prędkości.
Asynchroniczny silnik elektryczny z uzwojonym wirnikiem o najprostszym schemacie sterowania — włączenie rezystancji do obwodu wirnika ma wyjątkowo niskie właściwości regulacyjne. Dlatego przed pojawieniem się na rynku przetwornic częstotliwości opracowano różne schematy uzyskiwania zmniejszonej prędkości w trybie obniżania prędkości.
Właściwie nie ma ich tak dużo. Za granicą powszechne stało się stosowanie dodatkowej maszyny elektrycznej - hamulca wirowego zamontowanego na tym samym wale co silnik główny. Schemat pozwala uzyskać wystarczająco sztywne właściwości mechaniczne podczas opuszczania ładunku, ale taki napęd elektryczny ma wyjątkowo niską charakterystykę energetyczną (energia hamowania jest uwalniana w hamulcu wirowym). Ponadto hamulec wirowy ma dość wysoki koszt i znacznie komplikuje układ części mechanicznej.
Dlatego w celu uzyskania prędkości lądowania w mechanizmach podnoszących opartych na silniku asynchronicznym z wirnikiem fazowym w zakładzie Dynamo pod koniec lat 70. zespół projektowy kierowany przez E.M. Pevzner wprowadził samowzbudne hamowanie dynamiczne.
Taki napęd elektryczny jest szeroko stosowany w dźwigach domowych (panele typu TSD, TSDI, KSDB do suwnic mostowych, bramowych i bramowych, panele sterowania do żurawi wieżowych KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). Mówimy więc o dziesiątkach tysięcy działających żurawi.
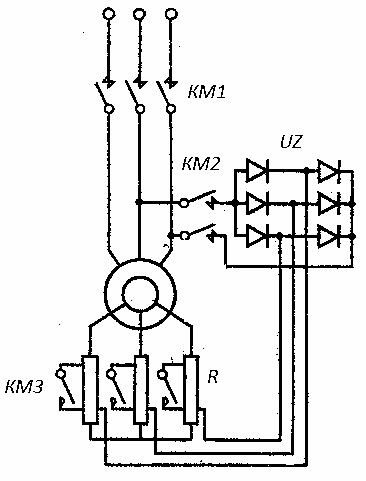
Ryż. 1. Schemat włączenia silnika asynchronicznego w tryb hamowania dynamicznego przez samowzbudzenie
Zasada hamowania dynamicznego z samowzbudzeniem jest następująca:
Obwód wirnika obejmuje prostownik trójfazowy UZ (ryc. 1). Silnik elektryczny jest odłączany od sieci za pomocą stycznika KM1. Napięcie wyprostowane jest podłączone do uzwojenia stojana przez stycznik KM2. Styki stycznika KM3 są zamknięte. Po zwolnieniu hamulca (nie pokazano na schemacie) wał silnika zaczyna się obracać pod wpływem spadającego ciężaru.
W uzwojeniu wirnika indukowana jest siła elektromotoryczna, pod wpływem której zaczyna płynąć prąd w obwodzie wirnik-stojan. Silnik rozwija moment hamowania, ładunek jest opuszczany ze stałą prędkością. Wartość prędkości jest określona przez wartość rezystancji obwodu wirnika. Im większy opór, tym większa prędkość opadania. Aby zwiększyć prędkość, stycznik KM3 jest wyłączony.
W trybie hamowania dynamicznego z samowzbudzeniem napęd elektryczny pobiera energię z sieci tylko do zasilania popychacza hydraulicznego hamulca i wyposażenia przekaźnikowo-stycznikowego. Jako przykład, ryc. 7 przedstawia charakterystykę mechaniczną napędu elektrycznego z panelem TSD.
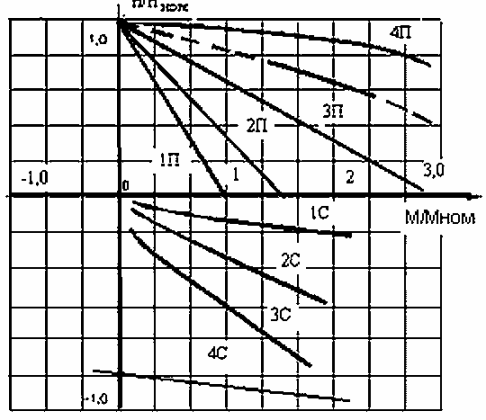
Ryż. 2. Charakterystyki mechaniczne napędu elektrycznego mechanizmu podnoszącego z panelem TSD
Charakterystyki hamowania dynamicznego są oznaczone jako 1C, 2C, 3C. Można zauważyć, że cechy mają wystarczającą twardość. Regulacja prędkości odbywa się w zakresie 1:8, co w większości przypadków jest wystarczające dla kranów masowych.
Warunkiem samowzbudzenia silnika elektrycznego jest:
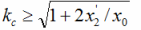
Gdzie x '2- rezystancja indukcyjna uzwojenia wirnika, Ohm; хо- rezystancja indukcyjna obwodu magnesującego. om
Gdzie ks — współczynnik schematu
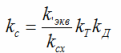
kd — współczynnik redukcji prądu wirnika do prądu stojana; kcx — współczynnik korekcyjny obwodu, dla trójfazowego obwodu mostkowego kx = 0,85; kt to współczynnik transformacji silnika ze stojana na wirnik
Współczynnik kd zależy od schematu połączeń uzwojeń stojana, które są połączone z gwiazdą w silnikach baterii domowych przy napięciu sieciowym 380 V.
Współczynnik kt zależy od współczynnika transformacji, tj. stosunku napięcia stojana do napięcia wirnika, który zależy od typu silnika. Na przykład dla kilku silników elektrycznych serii MT i 4MT zestawiono wartości i powiązane parametry. 1.
Tabela 1.
Typ silnika elektrycznego Moc, kWt Napięcie wirnika, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 290 1,31 1,31 0,197 3,73 1,05 MTN512-6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0,9 0,7 0,083 2,98 1,02
Warunek кс ≥ √(1 + 2х '2/хо) jest spełniony dla silników typu MTN412-6, 4MTN225L6, które można nazwać „wzbudzonymi”. Takie silniki elektryczne wchodzą w tryb samowzbudzenia bez podejmowania dodatkowych decyzji obwodu. Jednak w kompletnych urządzeniach niskonapięciowych (rozdzielnicach niskonapięciowych lub tablicach sterowniczych) przeznaczonych do współpracy z takimi silnikami, dla niezawodnej pracy przewidziano niewielkie wzbudzenie wstępne.
Wstępne wzbudzenie odbywa się poprzez podanie stałej, tzw Niewielka wartość „prądu zasilania” (zwykle nie więcej niż 10% prądu znamionowego silnika) z prostownika półfalowego. W przypadku silników wzbudzonych jest to w każdym przypadku wystarczające do niezawodnego przejścia do trybu samowzbudnego hamowania dynamicznego.
Silniki elektryczne MTN512-6, 4MTN280M6, dla których warunek кс ≥ √(1 + 2х '2/хо) nie jest spełniony, są „niewzbudzone”. Nie oznacza to, że takie silniki nie mogą pracować w trybie hamowania dynamicznego z samowzbudzeniem, ale wartość wymaganego dla nich dodatkowego prądu sięga 50% prądu znamionowego stojana.Powoduje to konieczność stosowania specjalnych NKU (paneli sterowniczych) dla silników elektrycznych niewzbudzonych. …
Silnik elektryczny typu 4MTN280L10 o кс = √(1 + 2х '2/хо) znajduje się na granicy samowzbudzenia i jakakolwiek przypadkowa zmiana parametrów może naruszyć warunek samowzbudzenia. Dlatego taki silnik można również sklasyfikować jako niewzbudzający.
Głównymi parametrami wpływającymi na zdolność silnika elektrycznego do samowzbudzenia jest napięcie znamionowe wirnika E2nom. Krytyczną wartość E2nom, przy której samowzbudzenie nie występuje bez dużego prądu zasilającego, należy przyjąć jako 300 V.
Ta cecha samowzbudnego trybu hamowania dynamicznego została wzięta pod uwagę przez fabrykę Dynamo i Sibelektromotor PO podczas opracowywania serii silników elektrycznych do dźwigów 4MT we wczesnych latach 80-tych.
W szczególności wartość E2nom dla niektórych silników elektrycznych została zmniejszona w porównaniu z poprzednią serią MT, aby silniki były wzbudzane.
Na przykład dla silnika elektrycznego 4MTN225L6, szeroko stosowanego w napędzie elektrycznym żurawi wieżowych, E2nom zostało zmniejszone w porównaniu z poprzednim silnikiem serii MTN512-6 z 340 do 290 V, co spowodowało samowzbudzenie silnika. Później OJSC „Sibelelectromotor” rozpoczął produkcję silnika elektrycznego 4MTM225L6 o tych samych parametrach.
Z czasem silniki elektryczne o podobnym przeznaczeniu zaczęły być produkowane przez innych producentów.
Rzhevsky Crane Construction Plant produkuje silnik elektryczny MKAF225L6, Siberian Electrotechnical Company produkuje silnik elektryczny 4MTM225L6 PND.Mimo odmiennego wyglądu od pierwowzoru związanego z możliwościami technologicznymi każdego z producentów, wszystkie te silniki elektryczne posiadają takie same parametry elektryczne oraz wymiary montażowe i są całkowicie wymienne.
Różnica w nazwach silników pozwala użytkownikowi na świadomy wybór jednego lub drugiego producenta, kierując się własnymi preferencjami, ceną, terminem dostawy itp. Jednocześnie należy mieć absolutną pewność, że wymiana silnika elektrycznego jednego producenta baterii na silnik elektryczny innego producenta nie doprowadzi do awarii baterii lub wypadku.
Jednak w ostatniej dekadzie na rynku krajowym pojawiły się silniki elektryczne różnych producentów, których marka dokładnie odwzorowuje markę „oryginalnego” silnika elektrycznego produkowanego przez JSC „Sibelelectromotor”. Można przypuszczać, że geneza silników elektrycznych związana jest z dużym wschodnim sąsiadem naszego kraju. Ich cena jest nieco niższa niż u tradycyjnych producentów, więc zainteresowanie nimi ze strony dostaw przedsiębiorstw jest zrozumiałe.
Tak więc zamawiając silnik elektryczny do montażu na produkowanym żurawiu lub wymieniając uszkodzony silnik elektryczny w żurawiu na działający, można otrzymać silnik elektryczny nieznanego producenta, o E2nom innym niż silnik prototypowy.
Sytuacja przypomina nieco początek lat 90., kiedy kilka grup popowych o tej samej nazwie koncertowało po kraju w tym samym czasie.
Przypomnijmy jeszcze raz, że stosunek E2nom / I2nom jest najważniejszym parametrem silnika z uzwojonym wirnikiem, wpływającym na dobór rezystorów rozruchowych, wyposażenia przekaźnikowo-stycznikowego oraz, jak wspomniano powyżej, na warunek samowzbudzenia silnik elektryczny.
Często jednak na tabliczkach znamionowych sklonowanych silników w ogóle nie ma danych wirnika. Oto przykład:
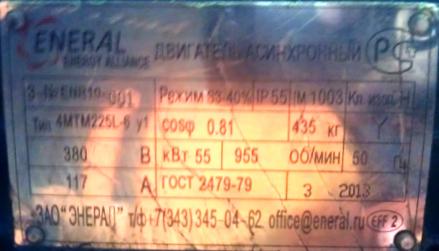
Ryż. 3. Tabliczka znamionowa silnika asynchronicznego żurawia wirnikowego
Nawiasem mówiąc, ten silnik elektryczny miał „poprawną” wartość E2nom, tylko teraz trzeba było ją ustalić empirycznie.
W katalogach innych producentów dla silnika elektrycznego 4MTM225L6 wskazywana jest wartość E2nom = 340 V, tj. silnik wzbudzony stał się silnikiem niewzbudzonym. Konsekwencją zastosowania takiego silnika elektrycznego jako części napędu elektrycznego z hamowaniem dynamicznym z samowzbudzeniem jest spadek obciążenia i rozdzielenie silnika elektrycznego z mechanicznym zniszczeniem uzwojeń wirnika i stojana.
Dokładnie taki obraz zaobserwował ostatnio autor w jednym z najstarszych rosyjskich przedsiębiorstw budowy maszyn, gdzie dostarczono nową suwnicę mostową ze sklonowanym silnikiem elektrycznym typu 4MTM225L6 o napięciu E2n = 340 V. Tylko dzięki szczęściu ludzie nie cierpieć. Dodatkowo właściciel dźwigu trzy (!) razy regeneruje silnik po wykonaniu uniku.
Inny producent klonów silników elektrycznych, najwyraźniej wielokrotnie doświadczający podobnych wypadków, teraz produkuje dwa silniki elektryczne pod tą samą marką (!). Jeden o E2nom = 340 V, drugi o E2nom = 264 V podany jest w katalogu z dopiskiem: „do zaczepów typu KB”, tj. żurawie wieżowe.
Taki silnik jest rzeczywiście najczęściej stosowany w żurawiach wieżowych, ale jest również montowany na suwnicach mostowych. Możesz więc usłyszeć dialog między Dostawcą a Klientem: „Do jakiego żurawia potrzebujesz silnika? Do podłogi. Następnie weź ten (E2nom = 340 V). » A w napędzie wciągników elektrycznych znajduje się pulpit sterowniczy z samowzbudnym hamowaniem dynamicznym. Wynik opisano powyżej.
Jednocześnie nikt nie twierdzi, że te silniki elektryczne są wadliwe lub zawodne i nie można ich używać w dźwigach. Im większy wybór na rynku, tym lepiej. Jak to mówią dobrych i różnych silników jest więcej. Po prostu ich marka wprowadza konsumenta w błąd, co może być obarczone niebezpiecznymi konsekwencjami.
Aby zastosować silnik elektryczny o parametrach wirnika innych niż pierwowzór, należy:
-
Zmierzyć E2nom, gdy obwód wirnika jest otwarty, a uzwojenie stojana jest podłączone do sieci;
-
Na podstawie pomiarów E2nom obliczyć, wybrać i zamówić rezystory balastowe;
-
Wybierz z katalogu panel sterowania do silników elektrycznych bez wzbudzenia i zamów.
Lub możesz po prostu zapytać o wartość E2nom przed zamówieniem silnika, który przyciąga swoją ceną i konkretnie uzgodnić to w umowie. Nie wyklucza to jednak pomiaru E2nom podczas sterowania wejściowego zamawianego silnika.
Podsumowując powyższe, możemy wyciągnąć następujące wnioski:
-
W napędzie elektrycznym kranów domowych opartym na silnikach elektrycznych z wirnikiem fazowym szeroko stosowane jest samowzbudne hamowanie dynamiczne. Działają dziesiątki tysięcy takich napędów elektrycznych. Nadal są wydawane.
-
Aby działać w trybie samowzbudnego hamowania dynamicznego, silnik elektryczny musi mieć określony stosunek E2nom / I2nom.
-
Głównym warunkiem samowzbudzenia silnika elektrycznego z uzwojonym wirnikiem jest wartość E2nom ≤ 300 V.
-
Stosowanie silników elektrycznych o E2nom > 300 V z panelami sterującymi przeznaczonymi do silników elektrycznych wzbudzonych może spowodować spadek obciążenia i zniszczenie silnika elektrycznego.