Odwróć i zatrzymaj silnik indukcyjny klatkowy
Silnik indukcyjny jest maszyną odwracalną. Aby zmienić kierunek wirowania wirnika, konieczna jest zmiana kierunku wirowania pola magnetycznego (poprzez przełączenie przewodów zasilających na zaciski dwóch faz silnika) — Obwody rozruchu i hamowania silnika
Charakterystyki mechaniczne dla dwóch kierunków obrotów przedstawiono na rys. 1.
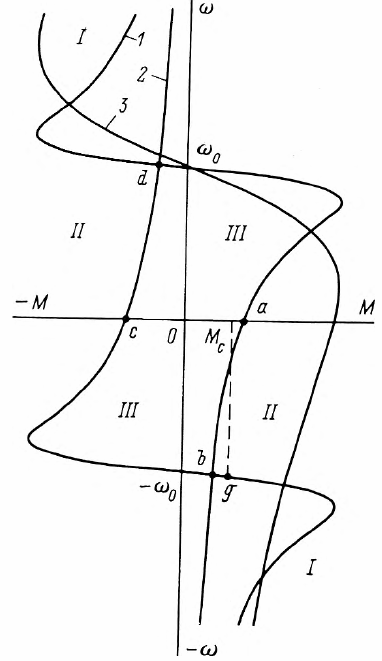
Ryż. 1. Rodzina charakterystyk mechanicznych silnika indukcyjnego do pracy rewersyjnej w stanie zatrzymania z zasilaniem sieci (I), trybu przeciwnego (II) i silnika (III) 1, 2 — naturalny; 3 — sztuczne.
Silnik indukcyjny klatkowy może służyć nie tylko jako silnik, ale także jako hamulec. W trybie zatrzymania każdy silnik elektryczny zawsze pracuje jako generator. W takim przypadku indukcyjny silnik elektryczny z wirnikiem klatkowym może mieć trzy tryby hamowania.
W trybie hamowania rekuperacyjnego maszyna pracuje z ujemnym poślizgiem. W tym przypadku prędkość wirnika przekracza prędkość wirowania pola magnetycznego.Oczywiście, aby przejść do tego trybu, należy przyłożyć zewnętrzny moment czynny na bok wału.
Tryb sprzężenia zwrotnego jest szeroko stosowany w instalacjach dźwigowych. Podczas opadania układ napędowy, dzięki energii potencjalnej ładunku, może osiągnąć prędkość przekraczającą prędkość wirowania pola magnetycznego, a opadanie nastąpi w stanie równowagi odpowiadającym pewnemu punktowi g na charakterystyce mechanicznej , gdy moment statyczny wywołany opadającym obciążeniem jest równoważony przez moment hamowania silnikiem.
W konwencjonalnych napędach z biernym momentem statycznym omawiany tryb jest realizowany tylko za pomocą specjalnych obwodów sterujących, które umożliwiają zmniejszenie prędkości wirowania pola magnetycznego. Charakterystyki mechaniczne maszyny indukcyjnej w trybie sprzężenia zwrotnego pokazano na tym samym rysunku. 1.
Jak pokazano, maksymalny moment obrotowy w trybie generatorowym jest nieco wyższy niż w trybie silnikowym, a poślizg krytyczny w wartości bezwzględnej jest taki sam.
Generatory asynchroniczne jako takie mają bardzo wąski zakres, a mianowicie elektrownie wiatrowe... Ponieważ siła wiatru nie jest stała, a zatem prędkość obrotowa urządzenia znacznie się zmienia, w tych warunkach preferowany jest generator asynchroniczny.
Najszerzej stosowany jest tryb hamowania — opór. Przejście do tego trybu silników asynchronicznych, a także silników prądu stałego, jest możliwe w dwóch przypadkach (ryc. 1): przy znacznym wzroście momentu statycznego (sekcja ab) lub przy przełączaniu uzwojenia stojana na inny kierunek obrotów ( sekcja cd).
W obu przypadkach silnik pracuje z poślizgiem większym niż 1, dopóki prądy nie przekroczą prądów rozruchowych. Dlatego w przypadku silnika klatkowego ten tryb może być używany tylko do szybkiego zatrzymania napędu.
Po osiągnięciu zerowej prędkości silnik musi zostać odłączony od sieci, w przeciwnym razie będzie miał tendencję do przyspieszania w przeciwnym kierunku.
Podczas hamowania silnikami z przeciwbieżnymi uzwojeniami, w obwód wirnika należy wprowadzić opornik rezystancyjny, aby ograniczyć prąd i zwiększyć moment hamowania.
Jest to również możliwe dynamiczny tryb hamowania… Rodzi to jednak pewne trudności. Gdy silnik jest odłączony od sieci, pole magnetyczne maszyny również zanika. Możliwe jest wzbudzenie maszyny indukcyjnej ze źródła prądu stałego, które jest podłączone do stojana odłączonego od sieci prądu przemiennego. Źródło powinno dostarczać prąd w uzwojeniu stojana zbliżony do znamionowego. Ponieważ prąd ten jest ograniczony jedynie przez rezystancję elektryczną cewki, napięcie źródła prądu stałego musi być niskie (zwykle 10–12 V).
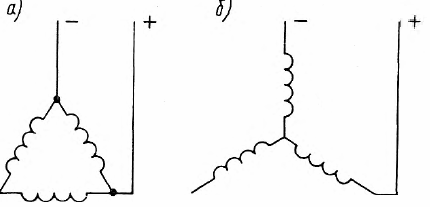
Ryż. 2. Podłączenie stojana silnika indukcyjnego do źródła prądu stałego w trybie hamowania dynamicznego przy połączeniu w trójkąt (a) i gwiazdę (b)
Samowzbudzenie jest również wykorzystywane do hamowania dynamicznego. Kondensatory są podłączone do odłączonego od sieci stojana.
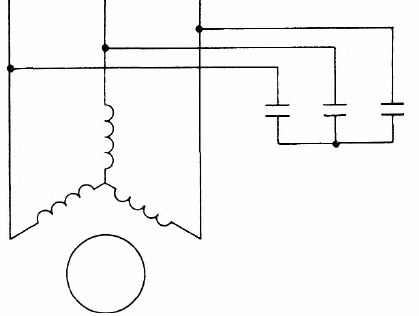
Ryż. 3. Schemat hamowania dynamicznego samowzbudnego silnika indukcyjnego
Gdy wirnik obraca się, w obwodzie stojana powstaje pole elektromagnetyczne w wyniku namagnesowania szczątkowego i przepływu prądu przez uzwojenia stojana oraz przez kondensatory.Gdy w obwodzie stojana zostanie osiągnięta pewna prędkość, zachodzą warunki rezonansowe: suma rezystancji indukcyjnych zrówna się z rezystancją pojemnościową. Rozpocznie się intensywny proces samowzbudzenia maszyny, co doprowadzi do wzrostu pola elektromagnetycznego. Tryb samowzbudzenia zakończy się, gdy EMF maszyny E i spadek napięcia na kondensatorach będą równe.
Maksymalny moment hamowania wraz ze wzrostem wydajności przesuwa się na niższe prędkości. Wadami rozważanego trybu hamowania jest występowanie hamowania tylko w określonej strefie prędkości oraz konieczność stosowania dużych kondensatorów do hamowania przy niskich prędkościach.
Plusem jest to, że nie jest wymagane żadne dodatkowe źródło energii elektrycznej. Tryb ten jest zawsze realizowany w instalacjach, w których do silnika podłączona jest bateria kondensatorów w celu poprawy współczynnika mocy sieci zasilającej.
Zobacz też w tym temacie: Obwody hamulcowe silników asynchronicznych