Elektryczne grzejniki kontaktowe
 Elektryczne nagrzewanie styków przez rezystancję stosuje się do nagrzewania, zgrzewania styków, laminowania w renowacji zużytych części oraz ogrzewania rurociągów.
Elektryczne nagrzewanie styków przez rezystancję stosuje się do nagrzewania, zgrzewania styków, laminowania w renowacji zużytych części oraz ogrzewania rurociągów.
Przez nagrzewanie jest stosowana jako główna metoda nagrzewania części i detali do ich późniejszej obróbki ciśnieniowej lub cieplnej, a także jako integralna część nagrzewania technologicznego w połączeniu z innymi operacjami w produkcji półwyrobów lub gotowych części. Poprzez ogrzewanie energia elektryczna jest zamieniana na energię cieplną bezpośrednio w częściach lub detalach wchodzących w skład obwodu elektrycznego. Do ogrzewania można ogólnie stosować zarówno prąd stały, jak i przemienny.
W elektrycznych instalacjach stykowych szeroko stosuje się prąd przemienny, ponieważ prądy potrzebne do ogrzewania w tysiącach i dziesiątkach tysięcy amperów przy napięciu kilku woltów można najłatwiej uzyskać tylko za pomocą transformatorów prądu przemiennego. Instalacje do elektrycznego podgrzewania stykowego części lub detali dzielą się na jednostanowiskowe i wielopozycyjne (rys. 1).
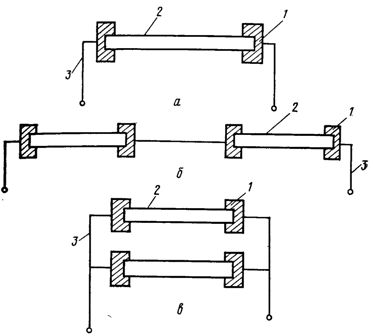
Ryż. 1. Schematy urządzeń jednopozycyjnych (a) i wielopozycyjnych z szeregowym (b) i równoległym (c) włączeniem szczegółów w obwód elektryczny: 1-styk zaciskowy dla prądu; 2 — podgrzewany detal; 3 — przewód zasilający.
W zależności od wymaganej szybkości ogrzewania i wydajności linii technologicznej stosuje się jeden lub inny schemat. Ze względów technicznych i ekonomicznych najkorzystniejsze jest zastosowanie schematu miopozycji z szeregowym podłączeniem nagrzanych przedmiotów do obwodu elektrycznego, ponieważ w tym przypadku dowolna prędkość dostarczania nagrzanych przedmiotów jest zapewniona przez stopniowy wzrost ich temperatury do z góry określonej wartości, przesuwając szczegóły z jednej pozycji do drugiej.
Niezależnie od schematu włączania nagrzanych części do obwodu elektrycznego, obciążenie prądowe w punktach styku styków przewodzących prąd z nagrzanym przedmiotem ma duży wpływ na wskaźniki technologiczne, elektryczne i techniczne oraz ekonomiczne elektrycznych instalacji stykowych . Obciążenie prądowe jest redukowane poprzez chłodzenie i zwiększanie ciśnienia styków, a także stosowanie cęgów ze stykami promieniowymi i końcowymi.
Jednofazowe i trójfazowe instalacje styków elektrycznych mogą być stosowane w przedsiębiorstwach naprawczych. Instalacje trójfazowe są bardziej wydajne niż jednobiegunowe instalacje jednofazowe o tej samej wydajności, ponieważ zapewniają równomierne obciążenie faz sieci zasilającej i zmniejszają obciążenie prądowe każdej fazy.
W zależności od konkretnych warunków dobierana jest opcja elektrycznego ogrzewania stykowego oraz instalacji grzewczej.
Główne charakterystyki elektryczne elektrycznych kontaktowych instalacji grzewczych
Dla każdej instalacji styku elektrycznego określa się następujące parametry projektowe:
-
moc transformatora mocy,
-
wymagany prąd elektryczny w obwodzie wtórnym,
-
nacisk na nagrzaną część lub przedmiot obrabiany,
-
efektywność
-
Współczynnik mocy.
Wstępne dane do obliczania instalacji styków elektrycznych to:
-
klasa materiału,
-
masa nagrzanej części i jej wymiary geometryczne
-
napięcie zasilania,
-
czas i temperaturę grzania.
Moc pozorna, V ∙ A, transformatora mocy dla urządzenia jednopozycyjnego:

gdzie kz = 1,1 ...1,3 — współczynnik bezpieczeństwa; F — przepływ ciepła użytkowego; ηtotal — ogólna sprawność instalacji: ηe — sprawność elektryczna; ηt — sprawność cieplna; ηtr — sprawność transformatora mocy.
Natężenie prądu, A, w obwodzie wtórnym, gdy przedmiot obrabiany jest podgrzewany do temperatury powyżej punktu konwersji magnetycznej
gdzie ρ jest gęstością materiału przedmiotu obrabianego, kg / m3; ΔT = T2 — T1 jest różnicą między końcową T2 i początkową temperaturą T1 nagrzewania przedmiotu obrabianego, K; σ2 - pole przekroju przedmiotu obrabianego, m2.
Czas nagrzewania zależy od średnicy przedmiotu obrabianego oraz różnicy temperatur na długości i przekroju. Zgodnie z warunkami technologicznymi różnica temperatur między warstwą wewnętrzną i wierzchnią nagrzewanego przedmiotu nie powinna przekraczać ΔТП = 100 K. Obliczone i eksperymentalne zależności graficzne do wyznaczania czasu nagrzewania podano w literaturze przedmiotu.
W praktycznych obliczeniach czas nagrzewania s cylindrycznych półwyrobów o średnicy d2 = 0,02 … 0, l m s ΔTP = 100 K można wyznaczyć ze wzoru empirycznego

Jeżeli przedmiot obrabiany jest podgrzewany do temperatury poniżej punktu konwersji magnetycznej, to przy określaniu prądu w obwodzie wtórnym należy wziąć pod uwagę efekt powierzchniowy, którego stopień wpływu zależy od przenikalności magnetycznej.
W odniesieniu do nagrzewania styków elektrycznych empiryczna zależność określająca zależność między prądem I2, względną przenikalnością magnetyczną μr2 przedmiotu obrabianego i jego średnicą ma postać
W praktycznych obliczeniach podaje się je zwykle z różnymi wartościami μr2, a natężenie prądu I2 określają wzory. Ta sama wartość natężenia określona na podstawie podanych wzorów (2) i (4) będzie wartością pożądaną w danym momencie. Zgodnie z obliczonymi wartościami I2 i Z2 napięcie, V, w obwodzie wtórnym jest podane przez wyrażenie

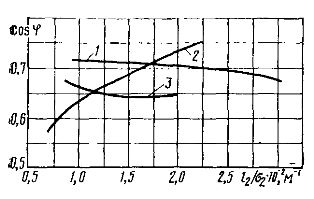
Ryż. 2. Zależność cosφ instalacji styków elektrycznych od stosunku l2 / σ2: 1 — dla instalacji dwupozycyjnej ze zmiennym ogrzewaniem dwóch półfabrykatów; 2 — do instalacji dwustanowiskowej z jednoczesnym ogrzewaniem dwóch wsadów; 3 — do montażu jednopozycyjnego.
Przy określaniu głównych charakterystyk elektrycznych instalacji stykowej należy wziąć pod uwagę, że parametry fizyczne części oraz parametry elektryczne instalacji zmieniają się w trakcie procesu nagrzewania. Ciepło właściwe cm i opór elektryczny przewodnika ρт zmieniają się w zależności od temperatury, a cosφ, η i t — w zależności od temperatury, konstrukcji i technologii instalacji oraz liczby miejsc grzewczych.
Zgodnie z graficznymi zależnościami eksperymentalnymi (rys. 2, 3) wyznacza się cosφ i ηtotal w zależności od stosunku długości przedmiotu obrabianego l2 do σ2. Wymagane wartości S, l2 i U2 można uzyskać podstawiając odpowiednie wartości wielkości zmiennych we wzorach (1), (2), (4) i (5). W praktycznych obliczeniach zwykle podstawiamy do wzorów średnie wartości cm, ρt, η, t i cosφ i wyznacza się średnią wartość mocy, prądu lub napięcia w założonym przedziale temperatur grzania.
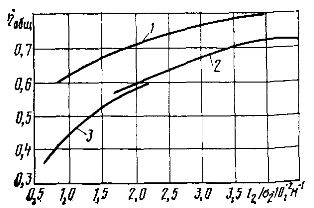
Ryż. 3. Zależność ogólnej sprawności instalacji elektrostykowych od stosunku l2 / σ2: 1 — dla instalacji dwustanowiskowej ze zmiennym nagrzewaniem dwóch detali; 2 — do montażu dwustanowiskowego z jednoczesnym ogrzewaniem dwóch detali; 3 — do montażu jednopozycyjnego.
Transformatory mocy elektrycznych instalacji stykowych pracują w trybie okresowym, który charakteryzuje się względnym czasem załączenia
gdzie tn to czas ogrzewania półfabrykatów, s; t3 — czas operacji wyładunkowych i transportowych, sek.
Całkowita moc znamionowa, kVA, transformatora mocy, z uwzględnieniem εx, jest określona przez wyrażenie
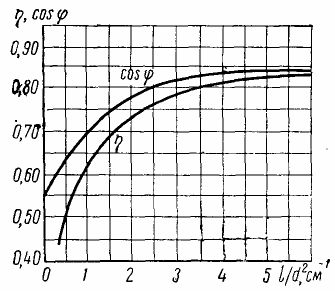
Ryż. 4. Zależność sprawności i współczynnika mocy elektrycznej instalacji grzewczej styków od wymiarów części