Jak określić poślizg silnika indukcyjnego podczas konfiguracji i pracy
Jeśli prędkość obrotowa silnika znacznie różni się od synchronicznie, mierzy się tachometrem lub tachogeneratorem, który jest podłączony bezpośrednio do wału silnika elektrycznego, a poślizg silnika określa wzór S = (n1 — n2) / n1, gdzie n1 = 60f / p — synchroniczny częstotliwość rotacji; n2 to rzeczywista prędkość.
Zalety tej metody wyznaczania poślizgu silnika elektrycznego: szybkość pomiaru oraz możliwość prowadzenia zarówno stałej, jak i zmiennej prędkości. Do wad tej metody pomiarowej należy zaliczyć małą dokładność konwencjonalnych tachometrów (błąd 1–8%) oraz trudność ich kalibracji. Ponadto obrotomierz nie może być używany do testowania silników elektrycznych małej mocy, ponieważ straty tarcia w mechanizmie obrotomierza stanowią zauważalne obciążenie.
Do wykonywania różnych pomiarów tachometr ręczny jest zwykle dostarczany z zestawem wymiennych końcówek o różnym kształcie i przeznaczeniu, które umieszcza się na końcu rolki (ryc. 1). Najszerzej stosowanym z tych końcówek jest gumowy stożek, który jest osadzony w metalowym wkładzie. Wszystkie te końcówki służą do kontaktu z zaostrzonym wgłębieniem na końcu wału maszyny elektrycznej. Gumowa środkowa końcówka jest używana do wysokich częstotliwości, stalowa końcówka do niskich i średnich częstotliwości.
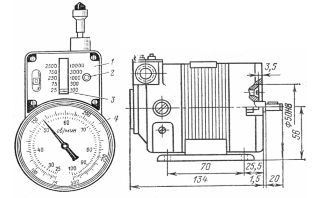 Ryż. 1. Widok ogólny obrotomierza odśrodkowego typu IO -10 i tachogeneratora: 1 — skala; 2 — przycisk przełącznika; 3 — wskaźnik limitu; 4 — wybierz
Ryż. 1. Widok ogólny obrotomierza odśrodkowego typu IO -10 i tachogeneratora: 1 — skala; 2 — przycisk przełącznika; 3 — wskaźnik limitu; 4 — wybierz
Jeśli w środku wału znajduje się wgłębienie, stosuje się przedłużkę, którą umieszcza się na wale obrotomierza, a odpowiednią końcówkę na przedłużeniu. W przypadku braku lub niedostatecznej ilości kłów stosuje się wałek, który jest dociskany od powierzchni bocznej (pierścień gumowy) do powierzchni obracającego się wału.
Zgodnie z określonymi warunkami pomiaru wybierz mocowanie (końcówkę przedłużającą). Przed przystąpieniem do pomiaru należy usunąć smar, brud, kurz ze środka rowka lub powierzchni wałka.
Aby zmierzyć prędkość obrotową silnika elektrycznego, należy najpierw ustawić niezbędny limit pomiaru obrotomierza. Jeśli kolejność pomiaru częstotliwości jest nieznana, pomiar należy rozpocząć od najwyższej granicy, aby uniknąć uszkodzenia obrotomierza.
Pomiar należy przeprowadzić przez krótki czas (3 — 5 s) ostrożnie dociskając końcówką obrotomierza do obracającego się wałka z lekkim naciskiem tak, aby oś wałka obrotomierza pokrywała się z osią wałka mierzonego lub, gdy za pomocą rolki jest do niej równoległa.

Jeśli poślizg nie przekracza 5%, prędkość można zmierzyć metodą stroboskopową przy użyciu lampy neonowej.
Na końcu wału silnika narysowana jest kredą linia średnicowa. Podczas pracy silnika jest on oświetlany przez neonówkę zasilaną z sieci o tej samej częstotliwości co silnik. Obserwator widzi na końcu wału nie linię, ale gwiazdę wolno obracającą się w kierunku przeciwnym do kierunku obrotu wału. Liczba promieni gwiazdy zależy od liczby biegunów silnika i położenia neonówki. Jeżeli światło z obu elektrod lampy pada na koniec trzonka, to liczba promieni widocznej gwiazdy wynosi 2 szt. Jeżeli koniec trzonka z linią kredową oświetla tylko jedna elektroda, liczba promieni widoczna gwiazda jest równa liczbie biegunów.
W czasie t (zwykle 30 s) odmierzonym przez stoper zliczana jest liczba promieni widocznej gwiazdy m przechodzącej przez pozycję pionową. Ponieważ liczba promieni widocznej gwiazdy wynosi 2p, poślizg
gdzie f1 jest częstotliwością sieci zasilającej neonówkę.
Przy f1 = 50 Hz.
Inny wariant metody stroboskopowej jest następujący. Jedna z tarcz mocowana jest na wale silnika od przodu (rys. 2). Zamontować łańcuch (rys. 3). W maszynie bipolarnej dysk oznaczony 2p = 2 jest zamocowany na wale i oświetlony lampą neonową z elektrodą krosową.

Ryż. 2… Obraz tarcz stroboskopowych w zależności od liczby biegunów silnika indukcyjnego
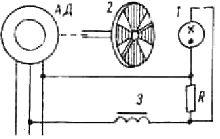
Ryż. 3… Schemat przełączania lampy neonowej dla stroboskopowej metody detekcji poślizgu: 1 — lampa neonowa, 2 — dysk stroboskopowy, 3 — cewka indukcyjna
Wirnik obraca się asynchronicznie i pozostaje w tyle za polem, więc dysk powoli obraca się w kierunku przeciwnym do obrotu wirnika.Jeżeli w czasie t m czarne sektory przechodzą przez nieruchomy punkt (strzałkę zamocowaną na łożysku), wartość poślizgu wyraża się wzorem
Zliczanie sektorów przechodzących przez stały punkt nie powinno rozpoczynać się od momentu uruchomienia stopera, ale od następnego przekroczenia znaku.
Aby uzyskać ostry obraz, do lampy należy przyłożyć napięcie, którego krzywą pokazano na ryc. 4… Lampka zapala się, gdy napięcie na jej zaciskach osiągnie wartość zwaną progiem zapłonu.
Ryż. 4... Schemat włączania lampy neonowej w celu uzyskania przebiegu o ostrym napięciu: 1 — lampa neonowa; 2 — cewka bierna z silnie nasyconym obwodem magnetycznym o rezystancji indukcyjnej X (spadki napięcia na rezystancjach R i X są w przybliżeniu takie same)
Wyznaczanie poślizgu silnika za pomocą cewki indukcyjnej. Metoda ta polega na monitorowaniu częstotliwości wirowania strumieni dyspersji wirnika Fr (rys. 5), które z częstotliwością proporcjonalną do poślizgu przecinają zwoje cewki indukcyjnej.
Ryż. 5. Schemat pomiaru poślizgu wirnika asynchronicznego silnika elektrycznego za pomocą cewki indukcyjnej
Czuły miliwoltomierz (najlepiej z zerem na środku skali) jest podłączony do zacisków cewki; cewka znajduje się na końcu wału wirnika. Obracając cewkę w różnych kierunkach, znajdują pozycję, w której obserwuje się maksymalne oscylacje strzałki instrumentu. Z liczby pełnych oscylacji k w czasie t obliczana jest wartość poślizgu

i przy f = 50 Hz.

Do obliczeń wygodnie jest policzyć 50 pełnych oscylacji i zanotować czas za pomocą stopera. Następnie: .
Jako cewkę indukcyjną można zastosować cewkę przekaźnika lub stycznik prądu stałego o 10-20 tysiącach zwojów (lub nawinąć cewkę o co najmniej 3000 zwojów). Aby zwiększyć strumień magnetyczny, do cewki wkłada się rdzeń wykonany z kilku pasków stali transformatorowej. Metoda cewki indukcyjnej jest bardzo prosta i odpowiednia dla wszystkich typów maszyn.
W silnikach asynchronicznych z uzwojonym wirnikiem, oprócz metod opisanych powyżej, poślizg można określić za pomocą amperomierza magnetoelektrycznego podłączonego do jednej z faz wirnika, a w przypadku obecności nieprzełącznej rezystancji w obwodzie wirnika za pomocą woltomierza podłączonego do pierścieni wirnika. Zaleca się stosowanie przyrządów z dwustronną skalą. Poślizg silnika indukcyjnego jest obliczany na podstawie liczby pełnych oscylacji igły urządzenia, podobnie jak w przypadku metody cewki indukcyjnej.
