Maszyny i urządzenia do zgrzewania oporowego
Zgrzewanie ciśnieniowe
 Zgrzewanie ciśnieniowe obejmuje różne metody spawania, w których łączone części są ściskane siłą mechaniczną, dzięki czemu uzyskuje się ciągłość i wytrzymałość połączenia.
Zgrzewanie ciśnieniowe obejmuje różne metody spawania, w których łączone części są ściskane siłą mechaniczną, dzięki czemu uzyskuje się ciągłość i wytrzymałość połączenia.
W większości przypadków zgrzewanie ciśnieniowe odbywa się poprzez ogrzewanie spawanych części w taki czy inny sposób, a tylko w niektórych szczególnych przypadkach spawanie odbywa się bez ogrzewania (na przykład spawanie na zimno, spawanie wybuchowe). Spośród wszystkich metod zgrzewania ciśnieniowego najbardziej rozpowszechnione jest zgrzewanie elektryczne.
Zgrzewanie stykowe lub oporowe nazywane jest metodą spawania elektrycznego, w której nagrzewanie następuje z powodu dominującego uwalniania ciepła w punktach styku spawanych części, gdy przepływa przez nie prąd elektryczny (ryc. 1).
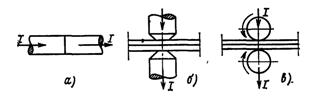
Ryż. 1. Główne rodzaje zgrzewania oporowego: a — czołowy, 6 — punktowy, b — rolkowy, I — kierunek prądu spawania.
Odporność na zgrzewanie charakteryzuje się lokalną koncentracją mocy cieplnej, a co za tym idzie, wysoką temperaturą w rejonie złącza spawanych części, co wynika ze znacznej rezystancji styku złącza w porównaniu z rezystancją samych części . Pod tym względem zgrzewanie oporowe jest bardzo ekonomicznym i celowym rodzajem spawania.
 Zgrzewanie oporowe można wykonywać zarówno prądem stałym, jak i przemiennym, ale w praktyce stosuje się prawie wyłącznie prąd przemienny, ponieważ prądy wymagane do spawania rzędu tysięcy, a nawet dziesiątek tysięcy amperów przy napięciach kilku woltów mogą być najbardziej łatwo uzyskać za pomocą transformatorów. dedykowane do tego celu źródła prądu stałego byłyby zbyt drogie, trudne w produkcji i mniej niezawodne w działaniu.
Zgrzewanie oporowe można wykonywać zarówno prądem stałym, jak i przemiennym, ale w praktyce stosuje się prawie wyłącznie prąd przemienny, ponieważ prądy wymagane do spawania rzędu tysięcy, a nawet dziesiątek tysięcy amperów przy napięciach kilku woltów mogą być najbardziej łatwo uzyskać za pomocą transformatorów. dedykowane do tego celu źródła prądu stałego byłyby zbyt drogie, trudne w produkcji i mniej niezawodne w działaniu.
Zgrzewanie doczołowe
W zgrzewaniu doczołowym końce łączonych części stykają się, po czym przez te części przepływa znaczny prąd, podgrzewając złącze do temperatury wymaganej do spawania. Wzdłużna siła ściskająca osiąga wtedy bezpośrednią ciągłość połączenia.
Istnieją dwa rodzaje zgrzewania doczołowego: zgrzewanie bezrefleksyjne (zgrzewanie oporowe) i ponowne zgrzewanie.
Podczas zgrzewania oporowego części z obrobionymi końcami stykają się i ściskają ze znaczną siłą, następnie przepływa przez nie prąd i wskutek rezystancji stykowej złącza następuje skoncentrowane wydzielanie ciepła.
Po osiągnięciu temperatury wymaganej do zgrzewania w strefie czołowej następuje zgrzewanie plastyczne łączonych części pod wpływem siły docisku.Pod koniec cyklu zgrzewania prąd jest wyłączany, a następnie zwalniana jest siła ściskająca.
 Zgrzewanie oporowe odbywa się zwykle przy gęstości prądu 5-10 kA i mocy właściwej 10-15 kVA na 1 cm2 przekroju spawanych części. Ten rodzaj spawania jest zwykle używany do łączenia części o małych przekrojach (do około 300 mm2).
Zgrzewanie oporowe odbywa się zwykle przy gęstości prądu 5-10 kA i mocy właściwej 10-15 kVA na 1 cm2 przekroju spawanych części. Ten rodzaj spawania jest zwykle używany do łączenia części o małych przekrojach (do około 300 mm2).
W zgrzewaniu doczołowym z dogrzewaniem nagrzewanie części odbywa się w trzech lub dwóch następujących po sobie etapach - podgrzewanie wstępne, wypalanie i spęczanie końcowe lub tylko w dwóch ostatnich etapach.
W początkowej chwili spawania części przeznaczone do spawania stykają się z siłą ściskającą 5 — 20 MPa Następnie włączany jest prąd, który podgrzewa złącza do 600 — 800 ° C (dla stali), tak jak w zgrzewanie doczołowe bez topienia. Następnie siła nacisku zmniejsza się do 2 — 5 MPa, w wyniku czego wzrasta rezystancja styku i odpowiednio zmniejsza się prąd spawania.
Wraz ze zwolnieniem kompresji zmniejsza się rzeczywista powierzchnia styku końców części, prąd pędzi do ograniczonej liczby punktów styku i podgrzewa je do temperatury topnienia, a przy dalszym ogrzewaniu w tych warunkach metal przegrzewa się do temperaturę parowania w poszczególnych punktach.
Pod wpływem nadmiernego ciśnienia opary metalu są usuwane ze strefy styku spawacza i wypierają cząsteczki ciekłego metalu do powietrza w postaci wachlarza iskier, a część stopionego metalu spływa kroplami. Za zniszczonymi występami kolejne występy styków stykają się ze sobą, tworząc nowe ścieżki dla prądu spawania, aby powtórzyć ustawiony efekt.
Ten proces sekwencyjnego stapiania końców części wzdłuż elementarnych grzbietów trwa do momentu pokrycia końców spawanych części ciągłą warstwą półpłynnego metalu, po czym powstaje metaliczna ciągłość złącza spawanego przy stosunkowo niewielkiej sile niszczącej . W tym przypadku nadmiar stopionego metalu jest wyciskany ze styku w postaci otworu (obręczy).
Nagrzewanie wystających końców spawanych części odbywa się głównie przez przewodzenie ciepła ze styku spawalniczego, gdzie temperatura ma największe znaczenie. Nagrzewanie się części między elektrodą łączącą a elektrodą zasilającą w wyniku przepływu prądu podczas procesu przetapiania jest bardzo niewielkie.
Regulacja ilości energii dostarczanej przy danej rezystancji zestyku określonej warunkami procesu zgrzewania może odbywać się albo poprzez zmianę prądu spawania, albo przez zmianę czasu przepływu prądu.
Sposób działania zgrzewarki doczołowej pokazano na ryc. 2.
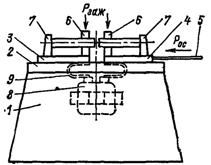
Ryż. 2. Schemat zgrzewarki doczołowej: 1 — łoże, 2 — prowadnice, 3 — płyta stała, 4 — płyta ruchoma, 5 — urządzenie podające, 6 — urządzenie dociskowe, 7 — ograniczniki, 8 — transformator, 9 — giętki przewód prądowy , Pzazh — siła docisku produktów, Ros — siła zakłócająca produktów.
Zgrzewarki doczołowe są klasyfikowane w następujący sposób.
1. Metodą spawania — do zgrzewania oporowego i obróbki blacharskiej (obróbka ciągła lub obróbka cieplna).
 2. Z rejestracją wstępną — powszechną i specjalistyczną.
2. Z rejestracją wstępną — powszechną i specjalistyczną.
3. Zgodnie z projektem mechanizmu napędowego — ze sprężyną, dźwignią, śrubą (od kierownicy), napędem pneumatycznym, hydraulicznym lub elektromechanicznym.
4.Ze względu na układ docisków — z dociskami mimośrodowymi, dźwigniowo-śrubowymi oraz dźwigniowo-śrubowymi, mogą być wykonywane ręcznie lub zmechanizowane z napędem pneumatycznym, hydraulicznym lub elektromechanicznym.
5. Według metody montażu i instalacji — stacjonarne i przenośne.
Zgrzewanie punktowe
W zgrzewaniu punktowym łączone części znajdują się zwykle pomiędzy dwiema elektrodami zamocowanymi w specjalnych uchwytach elektrod. Pod działaniem mechanizmu dociskowego elektrody mocno dociskają spawane części, po czym włącza się prąd.
W wyniku przepływu prądu części przeznaczone do spawania szybko nagrzewają się do temperatury zgrzewania, a największe wydzielanie ciepła występuje na powierzchniach łączonych, gdzie temperatura może przekraczać temperaturę topnienia części przeznaczonych do spawania.
na ryc. Na rycinie 3 przedstawiono rozkład temperatury wzdłuż przekroju zgrzewanych elementów, charakterystyczny dla końcowego etapu spawania stali.
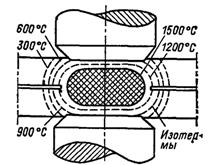
Ryż. 3. Pole temperatury w ostatnim etapie zgrzewania punktowego
Najwyższą temperaturę obserwuje się w centralnej zacienionej części miejsca spawania – rdzeniu.Powierzchnia styku części, która będzie spawana elektrodą (najczęściej z chłodzeniem wodnym) jest nagrzewana do stosunkowo niskiej temperatury, ale w obecności ciekły lub półpłynny rdzeń i sąsiadujący rdzeń metalowy z tworzywa sztucznego, siła ściskająca elektrod powoduje wgniecenia na powierzchni spawanych przedmiotów.
 Temperatura rdzenia w miejscu spawania jest zwykle nieco wyższa niż temperatura topnienia metalu.Średnica stopionego rdzenia określa średnicę miejsca spawania, zwykle równą średnicy powierzchni styku elektrody.
Temperatura rdzenia w miejscu spawania jest zwykle nieco wyższa niż temperatura topnienia metalu.Średnica stopionego rdzenia określa średnicę miejsca spawania, zwykle równą średnicy powierzchni styku elektrody.
Czas zgrzewania w jednym miejscu zależy od grubości i właściwości fizycznych materiału spawanych części, mocy zgrzewarki oraz siły docisku. Czas ten waha się od tysięcznych części sekundy (w przypadku bardzo cienkich kolorowych arkuszy) do kilku sekund (w przypadku grubych części stalowych). W przybliżeniu można przyjąć, że czas spawania jednego punktu stali miękkiej wynosi 1 s na 1 mm grubości spawanej blachy. Szybkość nagrzewania metalu do temperatury zgrzewania zależy istotnie od intensywności wydzielania ciepła.
Maszyna do zgrzewania punktowego
Spawanie rolkowe
W tego rodzaju spawaniu połączenie części ciągłym lub nieciągłym szwem odbywa się poprzez przejście przez spawane części, podawane za pomocą obracających się rolek (ryc. 4).
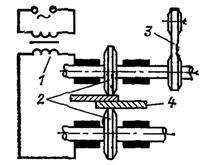
Ryż. 4. Zasada spawania rolkowego: 1 — transformator spawalniczy, 2 — elektrody rolkowe, 3 — napęd rolkowy, 4 — części spawane
Z natury procesu zgrzewanie rolkowe jest podobne do zgrzewania punktowego. Spawanie rolkowe jest często określane jako spawanie liniowe, co jest ściśle mówiąc błędne, ponieważ koncepcję spawania liniowego można rozszerzyć na prawie wszystkie rodzaje spawania.
Zgrzewarki rolkowe są zwykle wyposażone w dwa prądy zasilające, z których jeden jest napędzany, a drugi obraca się w wyniku tarcia podczas przesuwania spawanych części.
Zgrzewanie rolkowe jest najczęściej stosowane do łączenia części cienkościennych, na przykład przy produkcji zbiorników paliwa i beczek do transportu różnych materiałów.
Istnieją trzy tryby spawania rolkowego.
1. Ciągły ruch spawanych części względem rolek przy ciągłym dopływie prądu. Ta metoda jest stosowana podczas spawania części o całkowitej grubości nie większej niż 1,5 mm, ponieważ przy dużych grubościach połączenie wychodzące spod rolek, będąc w stanie plastycznym, może pęknąć z powodu rozwarstwienia. Ponadto przy ciągłym dostarczaniu prądu dochodzi do znacznego odkształcenia spawanych części.
2. Ciągły ruch spawanych części względem rolek przy przerywanym zasilaniu prądem. Ta najpowszechniejsza metoda zapewnia szwy z niewielkimi odkształceniami w produktach o niższym zużyciu energii.
3. Przerywany ruch zgrzewanych części względem rolek przy przerwanym zasilaniu prądem (zgrzewanie stopniowe).
Zgrzewanie rolkowe jest bardzo skuteczne w produkcji naczyń cienkościennych, w produkcji spawanych rur metalowych i wielu innych produktów.
 Głównymi elementami maszyn rolkowych są łoże, ramiona górne i dolne z elektrodami rolkowymi, mechanizm ściskający, napęd rolkowy oraz transformator spawalniczy z giętkim drutem prądowym.
Głównymi elementami maszyn rolkowych są łoże, ramiona górne i dolne z elektrodami rolkowymi, mechanizm ściskający, napęd rolkowy oraz transformator spawalniczy z giętkim drutem prądowym.
Transformatory maszyn rolkowych pracują w trybie intensywnym z PR = 50 — 60%, co wymaga wzmocnionego chłodzenia ich uzwojeń.
Zgrzewarki walcowe dzielą się: ze względu na rodzaj instalacji — na stacjonarne i mobilne, ze względu na przeznaczenie — na uniwersalne i specjalistyczne, ze względu na położenie rolek względem przodu maszyny — do zgrzewania poprzecznego, do zgrzewania wzdłużnego i uniwersalna z możliwością przesuwania rolek do położenia rolek względem produktu — z układem dwustronnym i jednostronnym, w zależności od sposobu obracania rolek — z napędem na jedną rolkę, z napędem dla obu rolek, z jedną rolką górną poruszającą się po wsporniku stałym oraz z jedną rolką i ruchomym trzpieniem dolnym, zgodnie z urządzeniem mechanizmu ściskającego — dźwigniowo-sprężynowego, napędzanego silnikiem elektrycznym, pneumatycznym i hydraulicznym, zgodnie z ilość rolek — w rolkach jednorolkowych, dwurolkowych i wielorolkowych.
Moc najpopularniejszych maszyn walcowych wynosi zwykle 100 — 200 kVA, podobnie jak zgrzewanie punktowe cienkich elementów, może być przeprowadzane za pomocą impulsów prądu rozładowania kondensatora, dla którego produkowane są różne typy maszyn rolkowych.

Ryż. 5. Zgrzewarka oporowa