Wpływ obciążenia silnika elektrycznego na sprawność i moc
Rezerwa mocy w ogóle lub niedociążenie silnika elektrycznego powoduje degradację sprawności i mocy. Czasami konieczna jest znajomość rzeczywistych wartości tych współczynników w celu określenia wartości mocy czynnej i biernej pobieranej przez silnik elektryczny z sieci.
Sprawność silników elektrycznych przy obciążeniach mniejszych niż nominalne można określić ze wzoru:
gdzie ηnom jest nominalną sprawnością silnika elektrycznego.
Aby określić β, użyj wzoru:

gdzie Kz jest stosunkiem rzeczywistego obciążenia do nominalnego (współczynnik obciążenia);
α — współczynnik przyjęty jako równy:
• dla silników prądu stałego ze wzbudzeniem szeregowym - od 0,5 (dla małych obrotów) do 1 (dla dużych obrotów);
• dla silników elektrycznych o wzbudzeniu równoległym – od 1 (dla małych obrotów) do 2 (dla dużych obrotów);
• dla asynchronicznych silników elektrycznych — od 0,5 do 1; dla dźwigów i synchronicznych silników elektrycznych — do 2.
Wartości współczynnik mocy Silnik indukcyjny zależy od wielu czynników i, ściśle mówiąc, jest inny dla każdego silnika elektrycznego, nawet tego samego typu.
Jednak w warunkach projektowych wystarczy znać tylko przybliżone średnie wartości współczynnika mocy w zależności od oczekiwanych obciążeń.
Z uproszczonego wykresu kołowego uzyskuje się następującą zależność:

Oznaczenia — patrz rys. 1.
gdzie tgφ1, jest tangensem kąta fazowego odpowiadającego rzeczywistemu obciążeniu silnika elektrycznego P1, kW; tanφnom — tangens kąta przesunięcia fazowego odpowiadającego nominalnemu obciążeniu silnika elektrycznego PH0M (określony przez cosφnom podany w paszporcie silnika); σ-stosunek momentu wywracającego do nominalnego (mieszczący się w wąskich granicach 1,8-2);

K3 — współczynnik obciążenia.
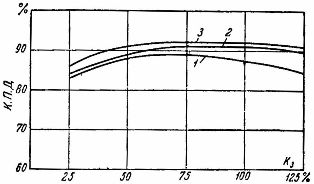
Ryż. 1. Krzywe sprawności różnych asynchronicznych silników elektrycznych w zależności od obciążenia.
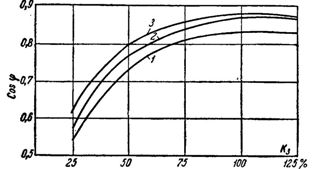
Ryż. 2. Krzywe współczynnika mocy asynchronicznych silników elektrycznych w zależności od obciążenia.
Krzywe zależności η i cosφ od obciążenia dla najpowszechniejszych typów asynchronicznych silników elektrycznych podano na rys. 1 i 2.