Wyposażenie elektryczne wind
 Winda to cykliczna maszyna podnosząca przeznaczona do pionowego podnoszenia osób i towarów. Po uzgodnieniu windy są podzielone na pasażerskie, towarowo-pasażerskie, szpitalne, towarowe.
Winda to cykliczna maszyna podnosząca przeznaczona do pionowego podnoszenia osób i towarów. Po uzgodnieniu windy są podzielone na pasażerskie, towarowo-pasażerskie, szpitalne, towarowe.
W zależności od prędkości samochodu windy dzielą się na wolnobieżne (do 0,71 m / s), szybkie (od 1 do 1,6 m / s), szybkie (od 2 do 4 m / s) i duża prędkość (4 — 10 m / s) ... Nośność wind pasażerskich wynosi od 320 do 1600 kg, wind towarowych - od 160-5000 kg. Przy prędkości do 1,6 m / s silnik elektryczny jest połączony z belką trakcyjną za pośrednictwem skrzyni biegów, jeśli prędkość jest wyższa, stosuje się bezprzekładniowe napędy elektryczne.

Dzięki szerokiej gamie opcji konstrukcyjnych wind pasażerskich i towarowych głównymi urządzeniami do nich są wciągnik, liny, samochód, przeciwwaga, hamulec mechaniczny i sprzęt kontrolny. Nowoczesne windy mają system zawieszenia przeciwwagi i linę przeciwwagi.

Kabina porusza się po pionowych szynach.Kabina jest zawieszona na linach, które otaczają linę holowniczą i prowadzą koła pasowe elektrycznego napędu wyciągarki. Na końcach liny znajduje się przeciwwaga, która porusza się po prowadnicach. Masa przeciwwagi jest równa sumie masy kabiny i (0,42 — 0,5) masy ładunku (lub połowy najbardziej prawdopodobnego obciążenia kabiny).
Napędy windy
W windach i windach towarowych rodzaje napędów elektrycznych dobiera się w zależności od prędkości poruszania się, ilości kondygnacji budynku oraz wymaganej dokładności hamowania. Obecnie w użyciu są następujące napędy elektryczne:
a) w przypadku budynków do 17 pięter stosuje się windy wolnobieżne i szybkobieżne o prędkości od 0,7 do 1,4 m / s o ładowności 320, 400 kg. Windy te wykorzystują napęd elektryczny z asynchronicznym dwubiegowym silnikiem elektrycznym z wirnikiem w klatce wiewiórki,
b) dla szybkich wind osobowych o prędkości 1,6 m/s, przeznaczonych dla budynków do 25 pięter, napęd elektryczny wg tyrystorowego układu regulacji napięcia (TRN) z dwubiegowym silnikiem asynchronicznym (TRN-ADD ) Jest używane.

Obecność regulowanego napędu elektrycznego zapewnia wysoką płynność procesów przyspieszania i zwalniania, dużą dokładność zatrzymania na podłodze (do 20 mm) oraz brak sekcji ze zmniejszoną prędkością przed zatrzymaniem. Drugie uzwojenie silnika służy do uzyskania niskich obrotów podczas remontu,
c) dla wind szybkobieżnych i szybkobieżnych stosuje się stałe napędy elektryczne według układu silnikowego przetwornicy tyrystorowej-TP-D i prądu przemiennego według układu przetwornica częstotliwości-zwarciowy asynchroniczny silnik elektryczny GGCH-AD.
Tyrystorowy napęd elektryczny z windy typu ULMP-25-16
Zasilanie napędu elektrycznego (rys. 1) realizowane jest przez rewersyjny tyrystorowy regulator napięcia UZ (TRN) przy rozruchu i ruchu równomiernym oraz przez oddzielny prostownik zmontowany zgodnie z jednofazowym obwodem mostkowym UZ1 do zasilania uzwojenie stojana podczas hamowania dynamicznego.
Układ zapewnia parametryczną kontrolę fazową prędkości obrotowej silnika indukcyjnego klatkowego. Układ automatycznego sterowania wykonany jest na jednoukładowym mikrokomputerze typu KR1816VB031, realizującym bezpośrednie cyfrowe sterowanie prędkością obrotową dwubiegowego asynchronicznego silnika elektrycznego.
Układ automatycznego sterowania zapewnia dużą dokładność utrzymania zadanej prędkości oraz zatrzymanie na poziomie wymaganego piętra bezpośrednio do zadanej bez odcinka z obniżoną prędkością. Drugie uzwojenie silnika jest włączane tylko podczas remontu.
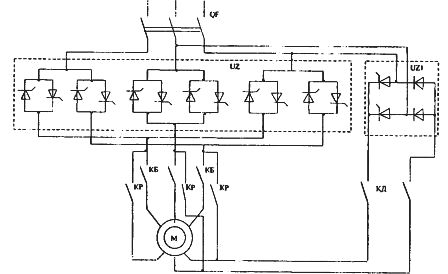
Ryż. 1. Schemat tyrystorowego napędu elektrycznego windy
Solenoidy hamulca
Mechanizmy podnoszące wind są wyposażone w specjalne urządzenia hamujące z elektromagnesami prądu stałego o krótkim i krótkim skoku, które są podłączone do sieci 220 lub 380 V za pośrednictwem prostownika.
Urządzenia sterujące windą
Przełączniki podłogowe przeznaczone do przełączania obwodów sterowania ruchem. Rejestrują położenie samochodu, automatycznie wybierają kierunek jazdy («w górę» lub «w dół») i wydają polecenie wyłączenia napędu elektrycznego podczas hamowania.Konstrukcyjnie są to trzypozycyjne (1-0-2) trzypunktowe przełączniki dźwigniowe (urządzenia do sterowania ruchem) mające styki ruchome (na dźwigni) do nieruchomych (na ciele).
Przełączniki podłogowe są zamontowane w szybie na poziomie podłogi, aw kabinie znajduje się uformowane odgałęzienie, które działa na dźwignię przełącznika podłogowego.
Kiedy kabina porusza się „w górę” obracając dźwignię, jedna grupa stałych styków zamyka się, a „w dół” - druga. Gdy samochód znajduje się na poziomie podłogi, przełącznik podłogowy znajduje się w położeniu neutralnym „O”, a stałe styki są rozwarte.

Przełączniki prędkości mają za zadanie dać impuls do zmniejszenia prędkości przed zatrzymaniem pojazdu. Stosowane są w windach szybkobieżnych z napędem elektrycznym o wykonaniu dwubiegowym. Są zbudowane na zasadzie przełączników podłogowych, ale mają inną konstrukcję. Wyłączniki prędkości montowane są w szybie kopalnianym jako komplet nad i pod spągiem w odległości od 0,5 do 0,6 m.
Przełączniki dźwigniowe są przeznaczone do obsługi kontrolowanych wind towarowych. Konstrukcyjnie są to trójpozycyjne przełączniki dźwigniowe z samoczynnym powrotem klamki do pozycji neutralnej („góra” -0- „dół”), montowane w kabinie. Obracając klamką, wybiera się kierunek ruchu, co uzyskuje się poprzez zamknięcie pary stałych styków. Po zwolnieniu uchwytu styki otwierają się, a silnik zatrzymuje się (wyłącza). Przełączniki są używane jednocześnie jako wyłączniki krańcowe w położeniach krańcowych kabiny. Osiąga się to poprzez działanie dźwigni na rolkę specjalnych prowadnic w szybie kopalni.
Czujniki indukcyjne przeznaczone do stosowania w windach szybkobieżnych. Schemat takich czujników dla prądu przemiennego i wyprostowanego pokazano na ryc. 2.
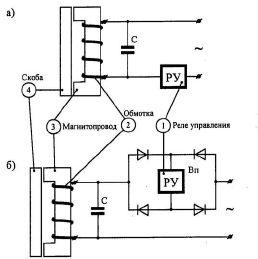
Ryż. 2. Schemat ideowy czujników indukcyjnych prądu przemiennego (a) i wyprostowanego (b).
W szybie górniczym zainstalowany jest laminowany obwód magnetyczny w kształcie litery U wykonany ze stali 3, a na kabinie znajduje się wspornik stalowy 4, który jest bocznikiem magnetycznym. Na obwodzie magnetycznym znajduje się cewka z uzwojeniem 2, do której podłączony jest przekaźnik sterujący 1 bezpośrednio lub poprzez prostownik Vp. Gdy zacisk opuszcza się (otwiera się obwód magnetyczny), rezystancja indukcyjna cewki jest niewielka, co zapewni działanie przekaźnika sterującego. Jeśli stalowy wspornik nachodzi na obwód magnetyczny, rezystancja indukcyjna cewki gwałtownie wzrasta i przekaźnik zostaje zwolniony.
Niezawodność i przejrzystość działania przekaźnika sterującego jest zapewniona przez włączenie równolegle do cewki pojemności C, która jest dobrana pod warunkiem uzyskania trybu zbliżonego do rezonansu prądów. Zastosowanie prostownika do zasilania przekaźnika sterującego zwiększa niezawodność działania układu magnetycznego przekaźnika.
Ponadto hermetyczne urządzenia kontaktowe (kontaktrony) są szeroko stosowane w czujnikach ruchu. Zastosowanie czujników indukcyjnych eliminuje takie wady przełączników podłogowych i przełączników prędkości, jak hałas i zakłócenia radiowe powstające w wyniku działania urządzeń stykowych.
Nakładanie magnetyczne to elektromagnetyczne urządzenie instalowane w kabinie i sterujące pracą zamków drzwi kopalnianych. Ogranicznik gałęzi magnetycznej jest podłączony do twornika elektromagnesu gałęzi.Gdy kabina znajduje się na podłodze, elektromagnes odgałęzienia jest odpowietrzany, sprężynowy zaczep zwalnia zatrzask zamka drzwi kopalni, umożliwiając ich otwarcie.
Podczas ruchu elektromagnes gałęzi jest zasilany - wprowadzany jest zatrzask, który uniemożliwia otwarcie drzwi. Zamki takie stosowane są w windach starej konstrukcji (lub modernizowanych) z ręcznym otwieraniem drzwi szybowych.

Automatyzacja wind
Główną różnicą między pracą wind i wyciągów jest ich wielopozycyjne położenie, co wyraża się tym, że mechanizmy mogą zajmować dużą liczbę stałych pozycji. Dlatego po każdym zatrzymaniu konieczne jest rozwiązanie logicznego problemu wyboru następnego ruchu. Rozwiązanie tego problemu jest obecnie realizowane za pomocą układów logicznych i mikroprocesorów. Dla schematu sterowania windą postawiono następujące zadania: kontrola położenia kabiny w szybie, automatyczny wybór kierunku ruchu, określenie czasu rozpoczęcia postoju, dokładne zatrzymanie kabiny na piętrze, automatyczne otwieranie i zamykania drzwi oraz zabezpieczenia napędów elektrycznych i windy.
Sygnały sterujące, które ustawiają program ruchu samochodu, dzielą się na dwa rodzaje: „rozkazy” pochodzące z samochodu i „wezwania” pochodzące z lądowiska. Polecenia wydawane są za pomocą przycisków umieszczonych odpowiednio w kokpicie i podłodze. W zależności od reakcji na polecenia i sposobów ich przetwarzania różnią się schematy sterowania odrębnego i zbiorowego.Dzięki odrębnej zasadzie sterowania obwód odbiera i wykonuje tylko jedno polecenie i podczas jego wykonywania nie odpowiada na inne rozkazy i wezwania.
Ten schemat jest najprostszy do wdrożenia, ale ogranicza możliwe charakterystyki windy i dlatego jest stosowany tylko w windach w budynkach mieszkalnych o wysokości do dziewięciu pięter ze stosunkowo małym przepływem pasażerów. Zgodnie z zasadą kontroli zbiorowej obwód otrzymuje jednocześnie kilka poleceń i wykonuje je w określonej kolejności, zwykle w kolejności pięter.

Podstawą systemu sterowania windą jest pomiar zegara podłogowego. Badaniem zegara może być wahadło, gdy mocowanie odbywa się w dwóch kierunkach, od dołu do góry i od góry do dołu, oraz w jednym kierunku, na przykład tylko od góry do dołu. Huśtawka wahadła jest używana częściej.