Zasada działania i rodzaje przekaźników czasowych
Do przełączania obwodów elektrycznych w celu realizacji algorytmu działania sprzętu, w schematach automatyki i po prostu do włączania lub wyłączania z opóźnieniem - często są używane przekaźniki czasowe... Przekaźniki czasowe można zlokalizować zarówno na podstawie elementy elektroniczne i elektromechanicznych. W tym artykule porozmawiamy o elektronicznych obwodach przekaźników czasowych, które są szeroko rozpowszechnione w dzisiejszym przemyśle.
Przede wszystkim musisz zrozumieć, że przekaźnik czasowy powoduje pewne opóźnienie w działaniu bezpośrednich urządzeń przełączających, które mogą być zarówno elektroniczne, jak i mechaniczne. Ale sam obwód przekaźnika czasowego jest takim elektronicznym zegarem.
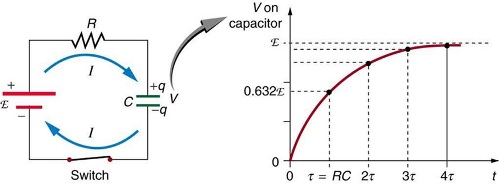
W najprostszej formie, aby ustawić opóźnienie, użyj obwodu RC, w którym podczas ładowania lub rozładowywania kondensatora przez rezystor napięcie w nim zmienia się wykładniczo w czasie, a określony obwód RC ma określoną stałą czasową, która zależy od wartości rezystora i kondensatora w nim zawartego.
Im większa pojemność kondensatora obwodu i im większa rezystancja rezystora, tym dłuższy jest proces ładowania lub rozładowania kondensatora, a zatem tym dłuższy jest wzrost lub spadek napięcia kondensatora.
W praktyce jednorazowe opóźnienie przy użyciu obwodu RC jest ograniczone do 30 sekund, wynika to z końcowej rezystancji płytki drukowanej, ale to ograniczenie nie dotyczy przekaźników mikrokontrolera, o czym będzie mowa później.
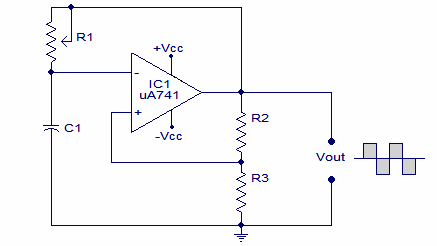
Aby nie ograniczać się czasem pojedynczego przejścia w obwodzie RC, konieczne jest pewne skomplikowanie zasady organizacji opóźnienia, aby przekaźnik był wielocyklowy, a mianowicie przekształcenie obwodu RC w generatora RC, a następnie policz impulsy z generatora, a czas trwania impulsu zostanie ponownie ustawiony na stały czas obwodu RC w generatorze. W ten sposób można znacznie wydłużyć czas trwania opóźnienia w przekaźniku czasowym.
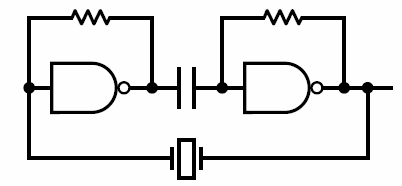
Dokładniejszy wynik i większa stabilność pozwolą uzyskać oscylator nie z obwodu RC, ale z rezonatora kwarcowego, ponieważ rezonator kwarcowy ma bardzo dokładną i stabilną częstotliwość, która nie zależy zbytnio od wahań temperatury zewnętrznej , czego nie można powiedzieć o kondensatorach i rezystorach.
Tak więc, zgodnie z liczbą cykli operacyjnych, elektroniczne przekaźniki czasowe są warunkowo podzielone na wielocyklowe i jednocyklowe.
Jednorazowy obwód przekaźnika czasowego
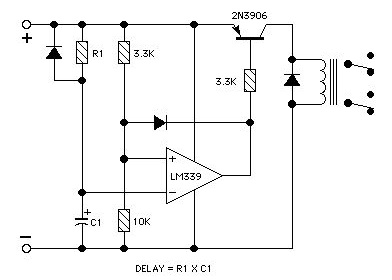
W obwodach jednorazowych sygnał sterujący (taki jak naciśnięcie przycisku lub po prostu podanie zasilania do obwodu) jest konwertowany na pasujące urządzenie, w którym poziom napięcia lub prądu jest konwertowany do przetwarzania w urządzeniu wyzwalającym.
Urządzenie startowe wysyła sygnał do urządzenia początkowego, które z kolei uruchamia urządzenie wykonawcze lub ładuje obwód RC. Obwody RC można przełączać, wybierając w ten sposób czas opóźnienia z dostępnego zakresu.
W procesie ładowania (rozładowywania) kondensatora obwodu napięcie w nim rośnie (spada) wykładniczo, podczas gdy jest ono w sposób ciągły porównywane z napięciem odniesienia komparatora analogowego.
Gdy tylko napięcie kondensatora wzrośnie powyżej (poniżej) napięcia odniesienia, przetwornica wyjściowa uruchomi obwód wykonawczy. Oczywiście przedział czasowy zależy nie tylko od stałej czasowej obwodu RC, ale także od wartości napięcia odniesienia ustawionego na drugim wejściu komparatora.
Wielocyklowy obwód przekaźnika czasowego
Schematy przekaźników do synchronizacji wielocyklowej pozwalają rozszerzyć zakres czasu, ponieważ, jak wspomniano powyżej, w schematach wielocyklowych bierze się pod uwagę kilka cykli działania obwodu RC lub kilka cykli działania generatora impulsów, tj. odstępy są dłuższe.
Obwody wielocyklowe, podobnie jak jednocyklowe, odbierają sygnał z wyzwalacza, ale sygnał ten trafia do bloku resetowania, gdzie przywraca część cyfrową do stanu początkowego. Następnie uruchamiany jest generator, który wysyła serię impulsów do licznika.Liczbę impulsów zliczoną na liczniku porównuje się z liczbą ustawioną na komparatorze cyfrowym, po osiągnięciu określonej liczby impulsów następuje wyzwolenie przetwornicy wyjściowej, która uruchomi obwód wykonawczy np. stycznik mocy.
Zmieniając częstotliwość generatora impulsów i wartość w komparatorze cyfrowym (lub w uproszczonej wersji na wyjściu licznika) wybiera się czas opóźnienia przekaźnika czasowego. Takie bloki można wygodnie zaimplementować na programowalnych mikrokontrolerach z wykorzystaniem elementów dyskretnych lub cyfrowych układów scalonych.
Tak więc najprostszy przekaźnik wielocyklowy zawiera następujące podstawowe bloki: cyfrowy generator impulsów z przełączanymi obwodami RC, licznik impulsów, komparator może być nieobecny, a wyjście licznika z wybranego rozładowania można podłączyć bezpośrednio do obwód kontrolny. Stosując „reset” do części cyfrowej, włącza się przekaźnik czasowy.
Schemat przekaźnika czasowego mikrokontrolera
Obecnie obwody czasowe mikrokontrolerów są bardzo powszechne, w których wiele bloków jest zaimplementowanych w oprogramowaniu. Za taktowanie zegara odpowiada rezonator kwarcowy, a ustawienia czasu dokonuje się za pomocą bloku przycisków podłączonych do odpowiednich wyjść, których funkcje konfiguruje się w programie jako wejścia.
Na wyjściu sterującym — przełącznik tranzystorowy, który steruje urządzeniem wykonawczym. Dla wskazania dostępny jest wyświetlacz, na którym można osobiście zobaczyć, jak odliczany jest czas.

Przekaźniki czasowe mikrokontrolerów są dziś coraz bardziej popularne ze względu na niski koszt mikrokontrolerów, ich niewielkie rozmiary oraz dostępność sprzętu i oprogramowania.Ponadto mikrokontrolery zużywają mało energii elektrycznej, a jeśli taka konstrukcja zostanie opracowana na elementach dyskretnych, to okaże się znacznie bardziej uciążliwa i zużywająca znacznie więcej energii.
Aby zmienić przekaźnik czasowy na programowalnym mikrokontrolerze, wystarczy zaktualizować oprogramowanie i nie trzeba niczego lutować. Ponadto cyfrowe interfejsy mikrokontrolerów ułatwiają parowanie ich z zewnętrznymi wskaźnikami i klawiszami, a także między sobą oraz z wieloma blokami różnego sprzętu, nie mówiąc już o interakcji z komputerem.
Dzisiejszy trend jednoznacznie skierowany jest na szerokie zastosowanie programowalnych mikrokontrolerów w układach przekaźników czasowych i automatyce zarówno w produkcji przemysłowej jak iw życiu codziennym.