Charakterystyki silników indukcyjnych jednofazowych
Jednofazowe silniki asynchroniczne są szeroko stosowane w technice i życiu codziennym. Produkcja jednofazowych asynchronicznych silników elektrycznych od ułamka wata do setek watów to ponad połowa produkcji wszystkich maszyn małej mocy, a ich moc stale rośnie.
Silniki jednofazowe są ogólnie podzielone na dwie kategorie:
-
silniki ogólnego zastosowania «, które obejmują silniki elektryczne przemysłowe i domowe;
-
silniki urządzeń automatyki — sterowane i niesterowane silniki prądu przemiennego oraz specjalistyczne maszyny elektryczne małej mocy (tachogeneratory, transformatory obrotowe, selsyny itp.).
Znaczna część asynchronicznych silników elektrycznych to silniki ogólnego przeznaczenia, które są przeznaczone do pracy w jednofazowej sieci prądu przemiennego. Istnieje jednak dość obszerna grupa uniwersalnych asynchronicznych silników elektrycznych przeznaczonych do pracy zarówno w sieciach jednofazowych, jak i trójfazowych.
Konstrukcja silników uniwersalnych praktycznie nie różni się od tradycyjna konstrukcja trójfazowych maszyn asynchronicznych… Podczas pracy w sieci trójfazowej silniki te mają charakterystykę podobną do silników trójfazowych.
Silniki jednofazowe posiadają wirnik klatkowy, a uzwojenie stojana może być wykonane w różnych wersjach. Najczęściej na stojanie umieszcza się uzwojenie robocze wypełniające dwie trzecie żłobków i uzwojenie rozruchowe wypełniające pozostałą jedną trzecią żłobków. Cewka biegowa jest obliczona na pracę ciągłą, a cewka rozruchowa tylko na okres rozruchu. Dlatego jest wykonany z drutu o małym przekroju i zawiera znaczną liczbę zwojów. Aby wytworzyć moment rozruchowy, uzwojenie początkowe zawiera elementy przesuwające fazę - rezystory lub kondensatory.
Silniki asynchroniczne małej mocy mogą być dwufazowe, gdy uzwojenie robocze umieszczone na stojanie ma dwie fazy przemieszane w przestrzeni o 90°. W jednej z faz stale znajduje się element przesuwający fazę - kondensator lub rezystor Top, zapewniający pewne przesunięcie fazowe między prądami cewki.
Zwykle nazywa się to silnikiem z kondensatorem podłączonym na stałe do jednej z faz kondensator… Pojemność kondensatora przesuwającego fazę może być stała, ale w niektórych przypadkach wartość pojemności może być różna dla trybu rozruchu i dla trybu pracy.
Cechą charakterystyczną jednofazowych silników asynchronicznych jest możliwość obracania wirnika w różnych kierunkach. Kierunek obrotu jest określony przez kierunek początkowego momentu obrotowego.
Dlatego przy niskiej rezystancji wirnika (Ccr < 1) silnik jednofazowy nie może pracować w trybie rewersyjnym. Tryb pracy silnika odpowiada obrotom wirnika 0 <n <nc przy większej prędkości następuje tryb generatora.
Cechą charakterystyczną silników jednofazowych jest to, że ich maksymalny moment obrotowy zależy od rezystancji wirnika. Wraz ze wzrostem rezystancji czynnej wirnika maksymalny moment obrotowy maleje i przy dużych wartościach rezystancji Skr > 1 staje się ujemny.
Przy wyborze rodzaju silnika elektrycznego do napędzania urządzenia lub mechanizmu konieczna jest znajomość jego charakterystyk, z których najważniejsze to charakterystyki momentu obrotowego (początkowy moment rozruchowy, moment maksymalny, moment minimalny), częstotliwość obrotów, charakterystyki wibroakustyczne. W niektórych przypadkach wymagane są również charakterystyki energetyczne i wagowe.
Na przykład charakterystykę silnika jednofazowego oblicza się z następującymi parametrami:
-
liczba faz — 1;
-
częstotliwość sieci — 50 Hz;
-
napięcie sieciowe — 220 V;
-
rezystancja czynna uzwojenia stojana — 5 omów;
-
rezystancja indukcyjna uzwojenia stojana — 9,42 Ohm;
-
rezystancja indukcyjna uzwojenia wirnika — 5,6 Ohm;
-
długość osiowa maszyny — 0,1 m;
-
liczba zwojów w uzwojeniu stojana -320;
-
promień otworu stojana — 0,0382 m;
-
liczba kanałów — 48;
-
szczelina powietrzna — 1,0 x 103 m.
-
współczynnik indukcyjności wirnika 1,036.
Uzwojenie jednofazowe wypełnia dwie trzecie żłobków stojana.
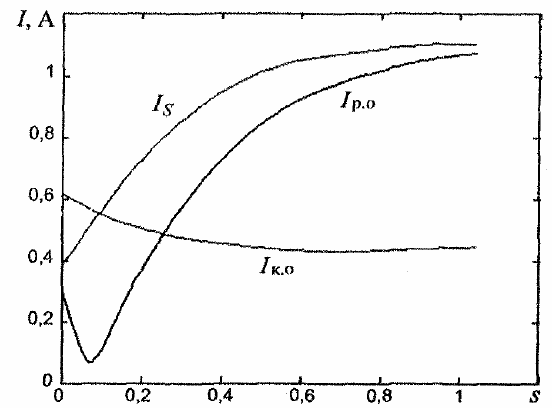
na ryc. 1 przedstawia zależności prądu jednofazowego silnika elektrycznego od elektromagnetycznego momentu poślizgu. W idealnym stanie jałowym prąd silnika pobierany przez sieć, głównie do wytworzenia pola magnetycznego, ma stosunkowo dużą wartość.
Dla symulowanego silnika wielkość prądu magnesującego wynosi około 30% prądu początkowego, dla silników trójfazowych o tej samej mocy - 10-15%.Moment elektromagnetyczny w idealnym stanie jałowym ma wartość ujemną, która wzrasta wraz ze wzrostem rezystancji obwodu wirnika. Na potknięcie się C= 1 moment elektromagnetyczny wynosi zero, co potwierdza poprawność działania modelu.
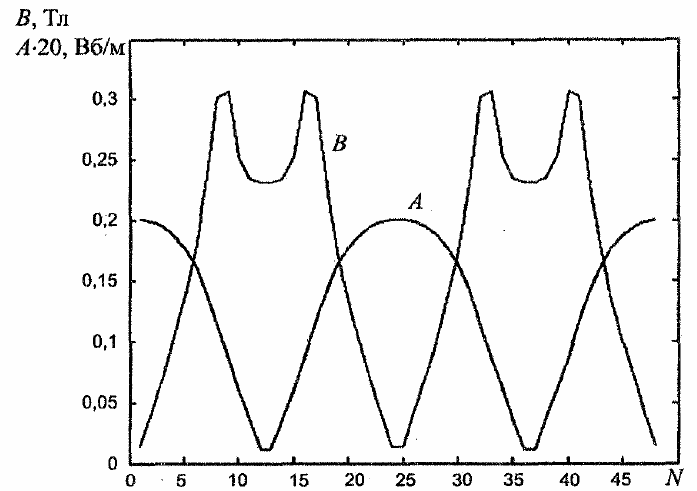
Figa. 1. Obwiednie potencjału wektorowego i indukcji magnetycznej w szczelinie silnika podczas poślizgu s = 1
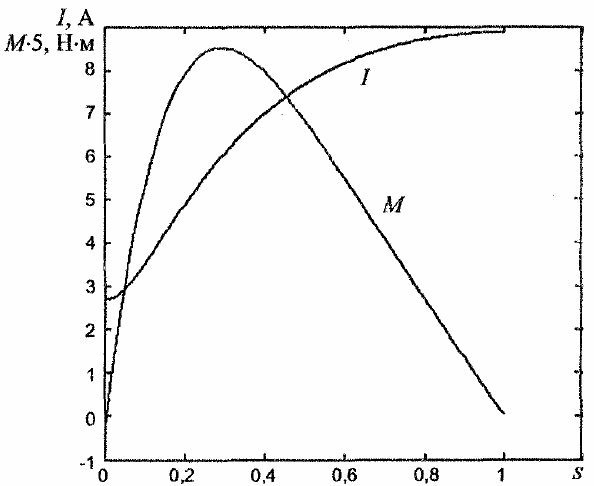
Ryż. 2. Zależność prądu i momentu elektromagnetycznego jednofazowego silnika asynchronicznego od poślizgu
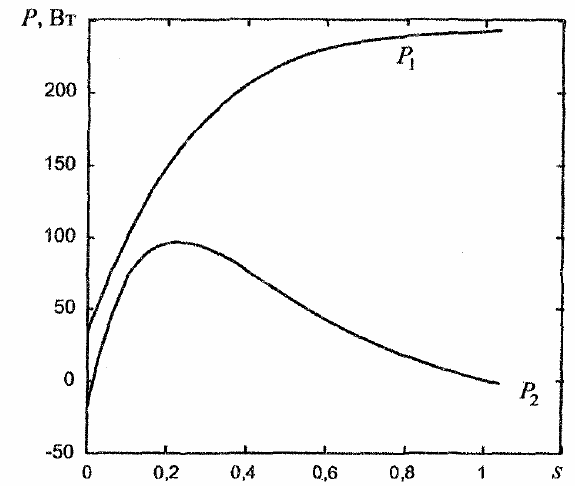
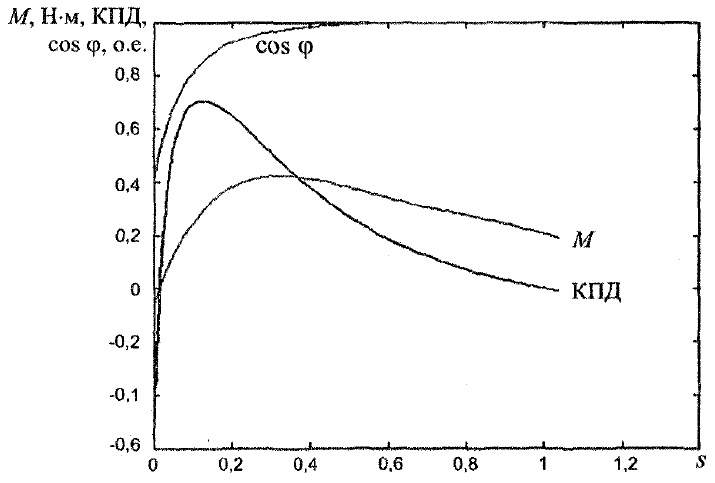
Zależności mocy użytecznej i pobieranej od poślizgu (rys. 3) mają charakter tradycyjny. Sprawność silnika na biegu jałowym idealnym ma znak ujemny odpowiadający ujemnemu momentowi obrotowemu, a współczynnik mocy w tym trybie jest bardzo niski (0,125 dla symulowanego silnika).
Niższa wartość współczynnika mocy w porównaniu z silnikami trójfazowymi wynika z dużej wartości prądu magnesującego. Wraz ze wzrostem obciążenia wartość współczynnika mocy wzrasta i staje się porównywalna z wartością dla silników trójfazowych (rys. 4).
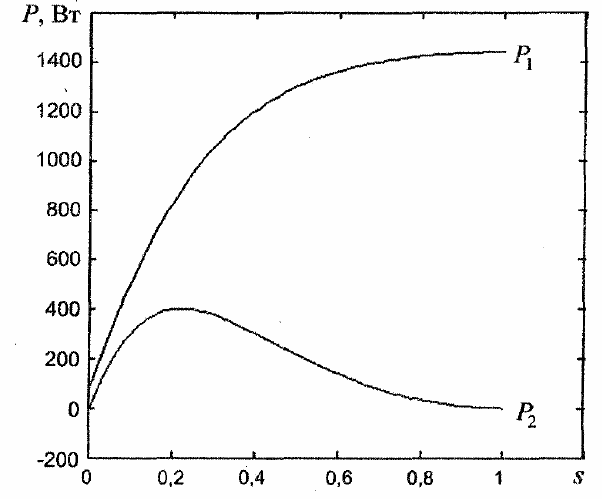
Ryż. 3. Zależność mocy użytecznej i pobieranej przez jednofazowy silnik asynchroniczny od poślizgu
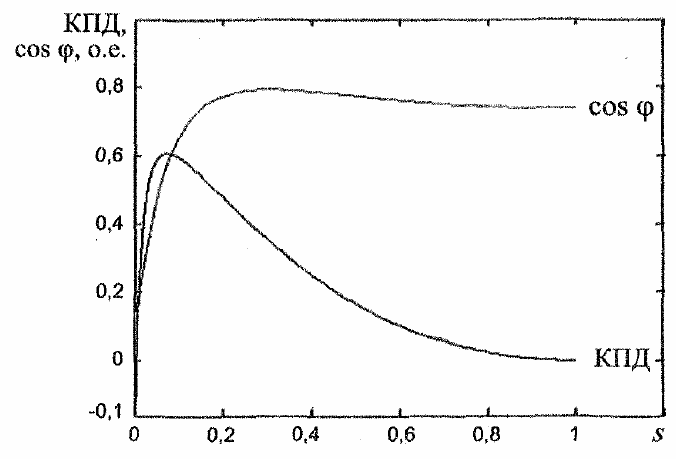
Ryż. 4. Zależność współczynnika działania użytecznego i mocy jednofazowego silnika asynchronicznego od poślizgu
Wraz ze wzrostem czynnej rezystancji wirnika wielkość momentu elektromagnetycznego maleje, a przy krytycznych poślizgach powyżej jedności staje się ujemna.
na ryc. 5 przedstawia zależność momentu elektromagnetycznego jednofazowego silnika poślizgowego dla różnych wartości przewodnictwa elektrycznego ośrodka wtórnego silnika.
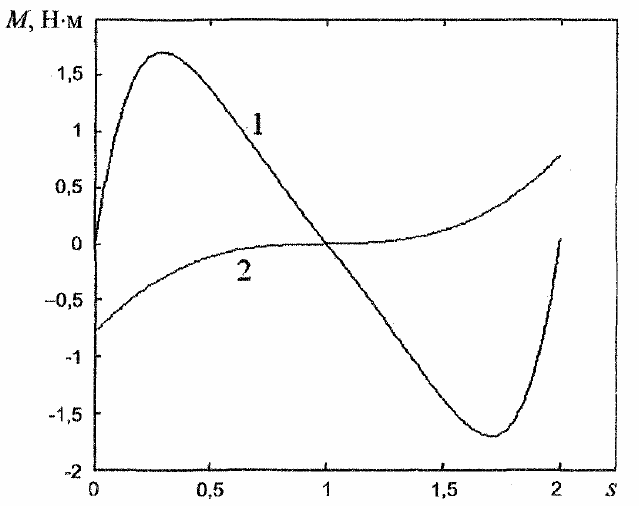
Ryż. 5.Zależność momentu elektromagnetycznego jednofazowego silnika poślizgowego przy różnych rezystancjach wirnika (1 — 17 x 106 Cm/m, 2 — 1,7 x 106 Cm/m)
Silniki kondensatorowe mają dwa uzwojenia podłączone na stałe do sieci. Jeden z nich jest podłączony bezpośrednio do sieci, drugi jest połączony szeregowo z kondensatorem, który zapewnia niezbędne przesunięcie fazowe.
Oba uzwojenia zajmują tę samą liczbę żłobków na stojanie, a liczba ich zwojów i pojemność kondensatora są obliczane w taki sposób, aby z pewnym poślizgiem zapewnić kołowe wirujące pole magnetyczne. Najczęściej poślizg nominalny jest akceptowany jako taki. W tym przypadku jednak początkowy moment obrotowy okazuje się znacznie mniejszy od nominalnego.
Pole magnetyczne w trybie początkowym jest eliptyczne; duży wpływ mają przeciwbieżne składowe pola magnetycznego.Jeśli pojemność kondensatora zostanie zwiększona poprzez wybranie go z warunku uzyskania pola kołowego podczas rozruchu, wówczas następuje spadek momentu obrotowego i spadek wskaźników energetycznych przy nominalnym poślizgu.
Możliwy jest również trzeci wariant, gdy pole kołowe odpowiada poślizgowi o większej wielkości niż w trybie nominalnym. Ale ta ścieżka również nie jest optymalna, ponieważ wzrostowi momentu obrotowego towarzyszy znaczny wzrost strat. Zwiększenie momentu rozruchowego silnika kondensatorowego można osiągnąć poprzez zwiększenie czynnej rezystancji wirnika. Metoda ta prowadzi do wzrostu strat z każdym poślizgiem, w wyniku czego spada sprawność silnika.
Ryż. 6.Zależność prądów silnika kondensatora poślizgowego (Azp.o — prąd cewki roboczej, Azk.o — prąd cewki kondensatora, E — prąd silnika)
Ryż. 7. Zależność od zużywanej P1 i użytecznej mocy poślizgu P2 kondensatora
Ryż. 8. Zależność współczynnika działania użytecznego i mocy od momentu elektromagnetycznego silnika z kondensatorem poślizgowym
Silnik kondensatorowy ma całkiem zadowalającą wydajność energetyczną, wysoki współczynnik mocy, którego wartość przewyższa współczynnik mocy silnika trójfazowego, a przy zwiększonej rezystancji wirnika i znacznej pojemności, wysoki moment rozruchowy. Jednocześnie, jak wspomniano powyżej, silnik ma obniżoną wartość sprawności.
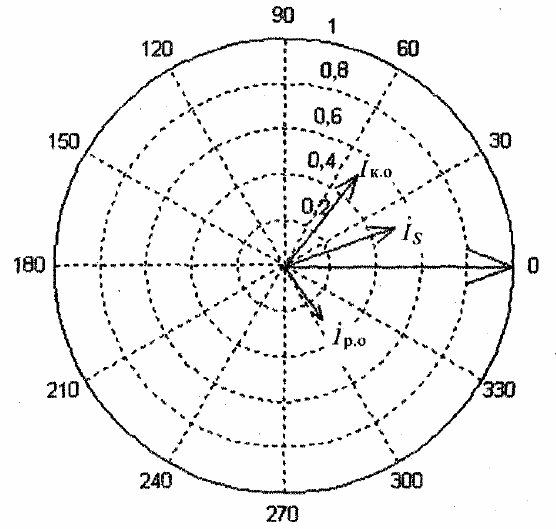
Ryż. 9. Schemat wektorowy silnika kondensatorowego przy poślizgu s = 0,1
Z wykresu wektorowego (rys. 9) wynika, że przy wybranej wartości pojemności kondensatora prąd cewki kondensatora wyprzedza napięcie sieciowe, a prąd cewki roboczej jest opóźniony. Diagram pokazuje również, że przy zbliżaniu się do wartości nominalnej pole magnetyczne silnika jest eliptyczne. Aby uzyskać pole kołowe, wartość pojemności kondensatora należy zmniejszyć tak, aby prądy w obu cewkach były równe co do wielkości.
Zobacz też w tym temacie:Wielobiegowe jednofazowe silniki kondensatorowe