Maszyny elektryczne prądu przemiennego
Maszyny elektryczne służą do przetwarzania energii mechanicznej na energię elektryczną (generatory AC i DC) i odwrotnie (silniki elektryczne).
We wszystkich tych przypadkach wykorzystuje się zasadniczo trzy główne odkrycia w dziedzinie elektromagnetyzmu: zjawisko mechanicznego oddziaływania prądów odkryte przez Ampere'a w 1821 r., zjawisko indukcji elektromagnetycznej odkryte przez Faradaya w 1831 r. oraz teoretyczne podsumowanie tych zjawisk dokonane przez Lenz (1834) w swoim dobrze znanym prawie kierunku prądu indukowanego (w rzeczywistości prawo Lenza przewidywało prawo zachowania energii dla procesów elektromagnetycznych).

Aby zamienić energię mechaniczną na energię elektryczną lub odwrotnie, konieczne jest wytworzenie względnego ruchu obwodu przewodzącego z prądem i polem magnetycznym (magnesem lub prądem).
W maszynach elektrycznych przeznaczonych do pracy ciągłej wykorzystuje się ruch obrotowy części ruchomej maszyny (wirnika maszyny prądu przemiennego) znajdującej się wewnątrz części nieruchomej (stojana).Cewka maszyny, która służy do wytwarzania pola magnetycznego, nazywana jest cewką indukcyjną, a cewka, w której płynie prąd roboczy, nazywana jest twornikiem. Oba te ostatnie terminy są również używane w odniesieniu do maszyn prądu stałego.
W celu zwiększenia indukcji magnetycznej uzwojenia maszyny umieszcza się na ferromagnetycznych elementach (stal, żeliwo).
Wszystkie maszyny elektryczne mają właściwość odwracalności, to znaczy mogą być używane zarówno jako generatory energii elektrycznej, jak i jako silniki elektryczne.

Silniki asynchroniczne
Stosowane są silniki asynchroniczne jeden z przejawów indukcji elektromagnetycznej… Na kursach fizyki demonstruje się to w następujący sposób:
Pod miedzianym dyskiem, który może obracać się wokół pionowej osi przechodzącej przez jego środek, umieszczony jest pionowy magnes w kształcie podkowy, który obraca się wokół tej samej osi (wyklucza się mechaniczne oddziaływanie między dyskiem a magnesem). W takim przypadku dysk zaczyna się obracać w tym samym kierunku co magnes, ale z mniejszą prędkością. Jeśli zwiększysz mechaniczne obciążenie tarczy (na przykład poprzez zwiększenie tarcia osi o łożysko oporowe), wówczas jej prędkość obrotowa maleje.
Fizyczne znaczenie tego zjawiska można łatwo wytłumaczyć teorią indukcji elektromagnetycznej: gdy magnes się obraca, powstaje wirujące pole magnetyczne, które indukuje w dysku prądy wirowe, których wielkość zależy, przy pozostałych rzeczach niezmienionych, od prędkość względna pola i dysku.
Zgodnie z prawem Lenza dysk musi obracać się w kierunku pola. W przypadku braku tarcia dysk musi uzyskać prędkość kątową równą prędkości magnesu, po czym indukowany emf zniknie. W prawdziwym życiu tarcie jest nieuniknione i dysk staje się wolniejszy.Jego wielkość zależy od mechanicznego momentu hamowania, jakiego doświadcza tarcza.
Rozbieżność między prędkością obrotową dysku (wirnika) a prędkością wirującą pola magnetycznego znajduje odzwierciedlenie w nazwach silników.
Zasada działania silników asynchronicznych:
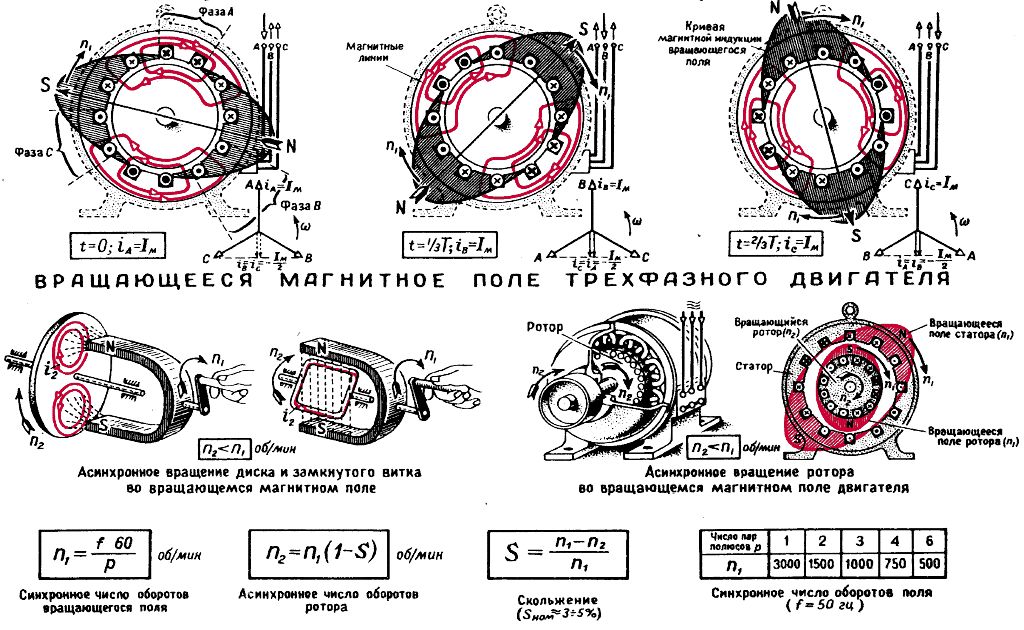
W technicznych silnikach asynchronicznych (najczęściej trójfazowych) powstaje wirujące pole magnetyczne prąd wielofazowyprzepływającego wokół stacjonarnego uzwojenia stojana. Przy częstotliwości prądu trójfazowego jest i liczba zwojów stojana 3p powoduje, że pole wirujące n = f / p obrotów / sek.

W komorze stojana znajduje się obrotowy wirnik. Do jego wału można podłączyć mechanizm obrotowy.W najprostszych silnikach „wiewiórczych” wirnik składa się z układu podłużnych metalowych prętów umieszczonych w rowkach stalowego cylindrycznego korpusu. Przewody są zwarte przez dwa pierścienie. Aby zwiększyć moment obrotowy, promień wirnika jest wystarczająco duży.
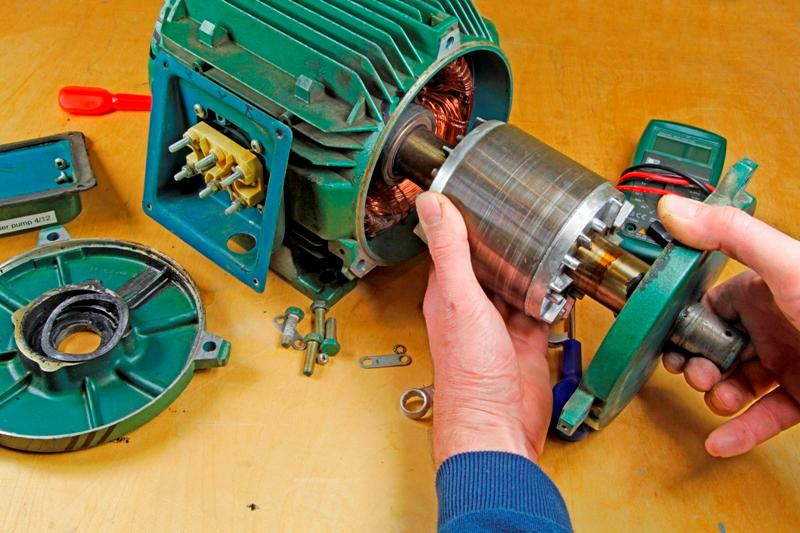
W innych konstrukcjach silników (zazwyczaj silników dużej mocy) druty wirnika tworzą otwarte uzwojenie trójfazowe. Końce cewek są zwarte w samym wirniku, a wyprowadzenia wyprowadzane są na trzy pierścienie ślizgowe zamocowane na wale wirnika i od niego odizolowane.
Trójfazowy reostat jest połączony z tymi pierścieniami za pomocą styków ślizgowych (szczotek), które służą do uruchamiania silnika w ruchu. Po obróceniu silnika reostat jest całkowicie usuwany, a wirnik staje się klatką wiewiórki (patrz — Silniki asynchroniczne z uzwojonym wirnikiem).

Na obudowie stojana znajduje się listwa zaciskowa. Uzwojenia stojana są do nich doprowadzane. Mogą być uwzględnione gwiazda lub trójkąt, w zależności od napięcia sieciowego: w pierwszym przypadku napięcie sieciowe może być 1,73 razy wyższe niż w drugim.
Nazywa się wartość charakteryzującą względne opóźnienie wirnika w stosunku do pola stojana silnika indukcyjnego potknięcie się… Zmienia się od 100% (w momencie rozruchu silnika) do zera (idealny przypadek bezstratnego ruchu wirnika).
Odwrócenie kierunku obrotów silnika indukcyjnego uzyskuje się poprzez wzajemne przełączenie co dwóch przewodów liniowych sieci elektrycznej zasilającej silnik.

Silniki klatkowe są szeroko stosowane w przemyśle. Zaletami silników asynchronicznych są prostota konstrukcji i brak styków ślizgowych.
Do niedawna główną wadą takich silników była trudność w regulacji prędkości, ponieważ jeśli w tym celu zmieni się napięcie obwodu stojana, wówczas moment obrotowy gwałtownie się zmieni, ale zmiana częstotliwości prądu zasilającego była technicznie trudna. Nowoczesne urządzenia mikroprocesorowe są obecnie szeroko stosowane do sterowania częstotliwością prądu zasilającego w celu zmiany prędkości silników — przetwornice częstotliwości.
Alternatory
Alternatory są zbudowane dla znacznej mocy i wysokiego napięcia. Podobnie jak maszyny asynchroniczne, mają dwa uzwojenia. Zwykle uzwojenie twornika znajduje się w obudowie stojana. Cewki indukcyjne, które wytwarzają główny strumień magnetyczny, są zamontowane na wirniku i są zasilane przez wzbudnicę — mały generator prądu stałego zamontowany na wale wirnika. W maszynach o dużej mocy wzbudzenie jest czasami wytwarzane przez wyprostowane napięcie przemienne.
Ze względu na bezruch uzwojenia twornika znikają trudności techniczne związane z zastosowaniem styków ślizgowych przy dużych mocach.
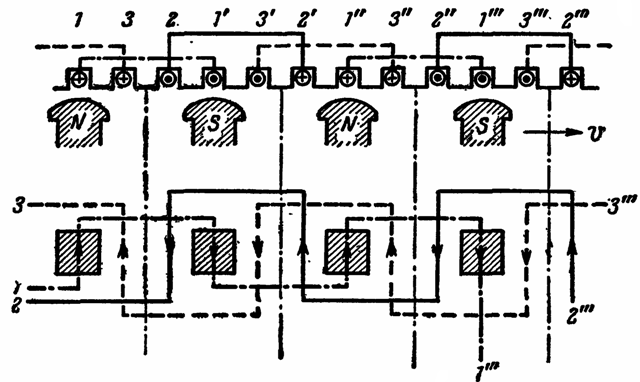
Poniższy rysunek przedstawia schemat generatora jednofazowego. Jego wirnik ma osiem biegunów. Na nich znajdują się uzwojone cewki (nie pokazane na rysunku) zasilane z zewnętrznego źródła prądem stałym przyłożonym do pierścieni ślizgowych zamontowanych na wale wirnika. Cewki biegunowe są uzwojone w taki sposób, że znaki biegunów skierowane w stronę stojana naprzemiennie. Liczba biegunów musi być parzysta.
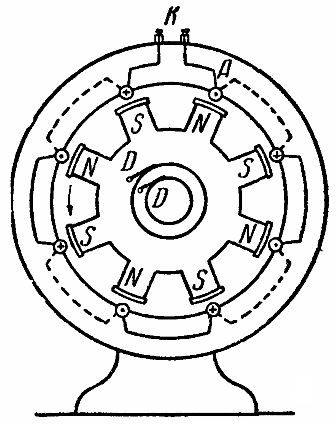
Uzwojenie twornika znajduje się w obudowie stojana. Jego długie pracujące „aktywne” druty, prostopadłe do płaszczyzny rysunku, są pokazane na rysunku za pomocą kółek, przecinają je linie indukcji magnetycznej, gdy obraca się wirnik.
Okręgi pokazują chwilowy rozkład kierunków indukowanych pól elektrycznych. Przewody łączące biegnące wzdłuż przedniej strony stojana są pokazane liniami ciągłymi, a na tylnej stronie liniami przerywanymi. Zaciski K służą do podłączenia obwodu zewnętrznego do uzwojenia stojana. Kierunek obrotu wirnika jest oznaczony strzałką.
Jeśli mentalnie przetniesz maszynę wzdłuż promienia przechodzącego między zaciskami K i obrócisz ją w płaszczyznę, wówczas względne położenie uzwojenia stojana i biegunów wirnika (bok i plan) zostanie przedstawione na schematycznym rysunku:
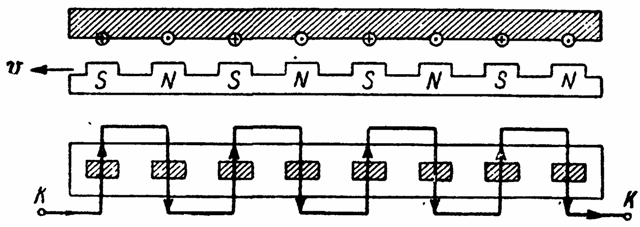
Biorąc pod uwagę rysunek, upewniamy się, że wszystkie aktywne przewody (przechodzące przez bieguny cewki indukcyjnej) są połączone ze sobą szeregowo, a indukowana w nich siła elektromotoryczna jest sumowana. Fazy wszystkich pól elektromagnetycznych są oczywiście takie same.Podczas jednego pełnego obrotu wirnika uzyskamy cztery pełne okresy zmiany prądu w każdym z drutów (a więc w obwodzie zewnętrznym).
Jeśli maszyna elektryczna ma p par biegunów, a wirnik obraca się, wykonując n obrotów na sekundę, to częstotliwość prądu przemiennego odbieranego przez maszynę wynosi f = pn Hz.
Ponieważ częstotliwość pola elektromagnetycznego w sieci musi być stała, prędkość obrotowa wirników musi być stała. Aby uzyskać EMF o częstotliwości technicznej (50 Hz), można zastosować stosunkowo wolne obroty, jeśli liczba biegunów wirnika jest wystarczająco duża.
Aby uzyskać prąd trójfazowy, w korpusie stojana umieszcza się trzy oddzielne uzwojenia. Każdy z nich jest przesunięty względem pozostałych dwóch o jedną trzecią odległości łuku między sąsiednimi (przeciwległymi) biegunami cewek indukcyjnych.
Łatwo sprawdzić, że gdy cewki indukcyjne obracają się, pola elektromagnetyczne są indukowane w cewkach przesuniętych w fazie (w czasie) o 120 °. Końce cewek są usuwane z maszyny i mogą być połączone w gwiazdę lub trójkąt.
W generatorze względna prędkość pola i przewodnika jest określona przez średnicę wirnika, liczbę obrotów wirnika na sekundę oraz liczbę par biegunów.

Jeśli generator jest napędzany prądem wodnym (hydrogeneratorem), zwykle wykonuje się go z wolnymi obrotami. Aby uzyskać pożądaną częstotliwość prądu, konieczne jest zwiększenie liczby biegunów, co z kolei wymaga zwiększenia średnicy wirnika.
Z kilku powodów technicznych potężne generatory wodoru zwykle mają pionowy wał i znajdują się nad turbiną hydrauliczną, co powoduje ich obrót.

Generatory napędzane turbiną parową — Generatory turbinowe mają zwykle dużą prędkość. W celu zmniejszenia sił mechanicznych mają one małe średnice i odpowiednio małą liczbę biegunów Szereg względów technicznych wymaga produkcji turbogeneratorów z poziomym wałem.
Jeśli generator jest napędzany silnikiem spalinowym, nazywa się go generatorem diesla, ponieważ silniki diesla są zwykle używane jako silniki zużywające tańsze paliwo.

Odwracalność generatora, silniki synchroniczne
Jeżeli do uzwojenia stojana generatora zostanie przyłożone napięcie przemienne z zewnętrznego źródła, wówczas nastąpi interakcja biegunów cewki indukcyjnej z polem magnetycznym prądu generowanego w stojanie i będą działać momenty obrotowe z tego samego kierunku na wszystkich biegunach.
Jeżeli wirnik obraca się z taką prędkością, że wkrótce po połowie okresu prądu przemiennego następny biegun cewki (przeciwny w znaku do pierwszego bieguna) zmieści się pod rozpatrywanym drutem uzwojenia stojana, to znak siła oddziaływania między nim a prądem, który zmienił swój kierunek, pozostanie taka sama.
W tych warunkach wirnik będąc pod ciągłym wpływem momentu obrotowego będzie się dalej poruszał i będzie mógł napędzać dowolny mechanizm. Pokonanie oporu ruchu wirnika nastąpi z powodu energii zużywanej przez sieć i generator stanie się silnikiem elektrycznym.

Należy jednak zauważyć, że ciągły ruch jest możliwy tylko przy ściśle określonej prędkości obrotowej, gdyż w przypadku odchylenia od niej moment przyspieszający będzie działał częściowo na każdy z biegunów wirnika, poruszając się między dwoma przewodami wirnika. stojan, część czasu - zatrzymanie.
Zatem prędkość obrotowa silnika musi być ściśle określona, — czas, w którym biegun jest zastępowany przez następny, musi pokrywać się z półokresem prądu, dlatego takie silniki nazywane są synchronicznie.
Jeśli do uzwojenia stojana przy nieruchomym wirniku zostanie przyłożone napięcie przemienne, to chociaż wszystkie bieguny wirnika podczas pierwszej połowy cyklu prądu doświadczają działania momentów tego samego znaku, to jednak z powodu bezwładności wirnik nie będzie miał czasu na ruch. W kolejnym półcyklu znak momentów obrotowych dla wszystkich biegunów wirnika zmieni się na przeciwny.
W rezultacie wirnik będzie wibrował, ale nie będzie mógł się obracać. Dlatego silnik synchroniczny należy najpierw nawinąć, to znaczy doprowadzić do normalnej liczby obrotów, a dopiero potem włączyć prąd w uzwojeniu stojana.
Rozwój silników synchronicznych odbywa się metodami mechanicznymi (przy małych mocach) i specjalnymi urządzeniami elektrycznymi (przy dużych mocach).
W przypadku niewielkich zmian obciążenia prędkość silnika zmieni się automatycznie, aby dostosować się do nowego obciążenia. Tak więc, gdy obciążenie wału silnika wzrasta, wirnik natychmiast zwalnia. Dlatego zmienia się przesunięcie fazowe między napięciem linii a przeciwną indukowaną EMF indukowaną przez cewkę indukcyjną w uzwojeniu stojana.
Ponadto reakcja twornika powoduje rozmagnesowanie cewek indukcyjnych, więc prąd stojana wzrasta, cewki indukcyjne doświadczają zwiększonego momentu obrotowego, a silnik ponownie zaczyna obracać się synchronicznie, pokonując zwiększone obciążenie. Podobny proces zachodzi przy redukcji obciążenia.
Przy ostrych wahaniach obciążenia ta zdolność adaptacyjna silnika może być niewystarczająca, jego prędkość będzie się znacznie zmieniać, „wypadnie z synchronizmu” i ostatecznie zatrzyma się, podczas gdy indukowana siła elektromotoryczna EMF indukowana w stojanie zanika, a prąd w nim wzrasta ostro. Dlatego należy unikać gwałtownych wahań obciążenia. Aby zatrzymać silnik, należy oczywiście najpierw odłączyć obwód stojana, a następnie odłączyć dławiki; podczas uruchamiania silnika należy przestrzegać odwrotnej kolejności czynności.
Silniki synchroniczne są najczęściej stosowane do napędzania mechanizmów pracujących ze stałą prędkością. Oto zalety i wady silników synchronicznych oraz metody ich uruchamiania: Silniki synchroniczne i ich zastosowania
Edukacyjna taśma filmowa - „Silniki synchroniczne”, stworzona przez wytwórnię pomocy edukacyjno-wizualnych w 1966 roku. Możesz go obejrzeć tutaj: Taśma filmowa «Silnik synchroniczny»
