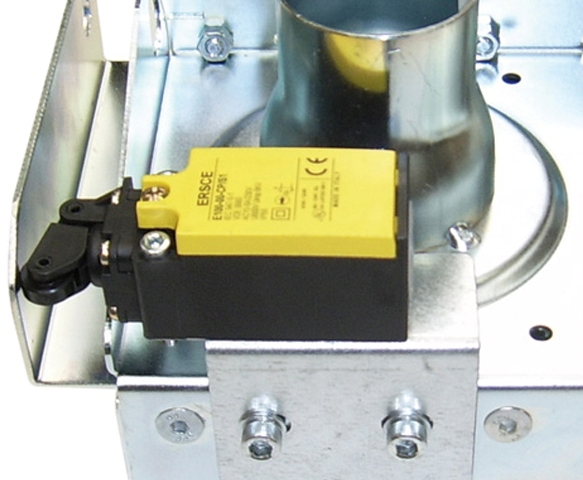
Porównanie stykowych i bezdotykowych wyłączników drogowych
W automatyce przemysłowej obwody są szeroko stosowane przełączniki i przełączniki jazdy (pozycji). wiele konstrukcji zaprojektowanych do sterowania położeniem różnych mechanizmów produkcyjnych i opartych na transformacji ruchu tych mechanizmów w sygnale elektrycznym.
Przełączniki pozycyjne mogą być również wykorzystywane do realizacji innych funkcji niż sterowanie położeniem mechanizmów produkcyjnych, np. kontrola kąta obrotu, poziomu, docisku ciężarka itp.

Przełączniki kierunku to urządzenia o działaniu dyskretnym, działające na zasadzie narastania, to znaczy reagują tylko na zmianę położenia sterowanego mechanizmu. Sygnał wyjściowy zwrotnic jest niejednoznaczną funkcją ruchu mechanizmu od zadanego położenia początkowego.
Rodzaje zwrotnic drogowych
W zależności od zasad przełączania pozycyjnego metodę przełączania dzieli się na:
-
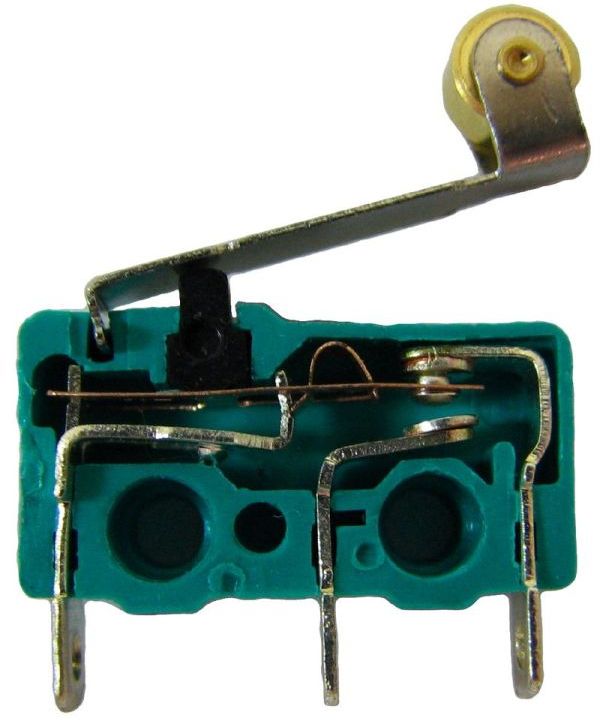
styk mechaniczny wykonany ze styków przełączających i elementów kontaktowych;
-
styk statyczny (magnetomechaniczny), którego czuły element jest bezdotykowy, a elementem przełączającym jest styk;
-
statyczne elementy bezdotykowe, czułe i przełączające, z których wykonane są elementy bezdotykowe.
W stykowym charakterze węzła „przełączanie - zatrzymanie”, to znaczy w stykowym charakterze połączenia elementu napędowego (wejściowego sygnału sterującego) z elementem czułym, węzeł ten nazywa się mechanicznym, aw bezkontaktowym - statycznym .
W zależności od konstrukcji przełączniki można łączyć lub rozdzielać. W pierwszym przypadku elementy czułe i przełączające są umieszczone w jednej obudowie i konstrukcyjnie wykonane jako całość. W drugim czuły element może znajdować się w odległości kilkudziesięciu i kilkuset metrów od przełącznika.
Zniekształcenie pola magnetycznego przełącznika ścieżki uzyskuje się poprzez zmianę parametrów obwód magnetyczny element wrażliwy. Zmiennymi parametrami mogą być również powierzchnia czynna i wielkość szczeliny powietrznej przenikalność magnetyczna obwód magnetyczny.
Obecnie zakres zastosowań mechanicznych łączników pozycyjnych w automatyce przemysłowej zawęża się i pojawia się pytanie o nieprzydatność tego typu łączników pozycyjnych do budowy układów automatyki.
To ostatnie jest spowodowane następującymi czynnikami:
-
Złożoność konstrukcji zespołu rozłącznika, ze względu na restrykcyjność wymagań dotyczących granic dopuszczalnych wahań szeregu parametrów, powoduje znaczne trudności w jego wykonaniu i regulacji.
-
Stosunkowo duża krytyczność charakterystyki dokładności tego urządzenia na wpływ czynników destabilizujących (zużycie powierzchni styku, poluzowanie elementów mocujących, niewspółosiowość elementów ruchomych itp.).
Szereg rozwiązań konstrukcyjnych mechanizmów opartych na mechanicznych wyłącznikach stykowych w ogóle nie może zostać zrealizowanych. Należą do nich mechanizmy wymagające wysokich dopuszczalnych poziomów prędkości i częstotliwości przełączników ruchu.
Jeżeli wymagana prędkość działania zwrotnicy może zostać zmniejszona z powodu dodatkowych połączeń kinematycznych mechanizmu, które między innymi pogarszają cechy jakościowe układu sterowania (w szczególności parametry dokładnościowe), to dopuszczalna częstotliwość pracy ( rozdzielczość) nie może być zwiększona przez komplikacje strukturalne.
Zobacz też: Montaż wyłączników krańcowych i wyłączników
W takim razie, jaki jest powód powszechnego stosowania mechanicznej zasady przełączania pozycji? Odpowiedzi na to pytanie należy szukać w dwóch aspektach: w istniejących zasadach budowy układów automatyki oraz w zaletach układu przełączania torów stykowych.
Zalety przełączników torów styków
Mechaniczne łączniki stykowe, realizowane najczęściej z wyjściem wieloobwodowym, charakteryzują się następującymi zaletami:
-
wysoki współczynnik przełączania;
-
wysoka moc właściwa sterowania (stosunek zawartej mocy do gabarytów);
-
uniwersalność, czyli możliwość przełączania zarówno obwodów prądu stałego, jak i przemiennego;
-
duży zakres napięć w zestawie;
-
znikome zużycie energii wewnętrznej (mała wartość rezystancji przejściowej styków w stanie zamkniętym);
-
mała zależność dokładności i stabilności pracy od zmian sterowanej mocy.
Wady przełączników ścieżek styków
Zasada mechanicznego styku tych urządzeń często nie pozwala na spełnienie zwiększonych wymagań dotyczących niezawodności, trwałości i dokładności układów automatyki. Ponadto mechaniczne łączniki stykowe są bardzo wrażliwe na działanie różnych czynników klimatycznych (zwłaszcza w niskich temperaturach).
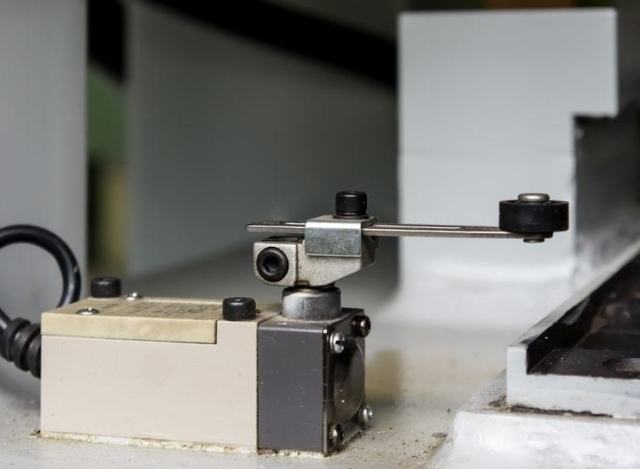
Mechaniczne przełączniki stykowe charakteryzują się ograniczonymi dopuszczalnymi poziomami maksymalnej i minimalnej prędkości ruchu ogranicznika przełączania, które mieszczą się w zakresie 0,3 — 30 m / min, a zwiększenie prędkości ogranicznika przełączania powyżej dopuszczalnego poziomu prowadzi do gwałtownego spadku w wytrzymałości mechanicznej na przełączniku.
W takich zwrotnicach dopuszczalne odchyłki kierunku działania siły przełączającej względem osi dźwigni są bardzo małe, a ich przekroczenie prowadzi do uszkodzeń mechanicznych, zwłaszcza w zwrotnicach z cięgłem przednim.
W celu uzyskania charakterystyk wyjścia przekaźnikowego (charakterystyki sterującej) w konstrukcji takich przełączników przewidziano urządzenia wyzwalająco-sprężynowe. Wymagany stopień charakterystyk wyjścia przekaźnikowego jest osiągany kosztem znacznego zmniejszenia trwałości wyłącznika z powodu dużych naprężeń dynamicznych występujących w wyzwalaczu w momencie zadziałania.
W mechanicznych przełącznikach chwilowych szerokość pętli histerezy (różnicy skoku) charakterystyki wyjściowej osiąga znaczną wartość, co jest całkowicie nie do przyjęcia dla wielu procesów technologicznych ze względu na bezproduktywne wydłużenie czasu trwania cyklu przetwarzania.
Zmniejszenie różnicy w skoku tych przerzutek wiąże się albo ze zwiększeniem złożoności ich konstrukcji, albo ze zwiększeniem ich rozmiarów. Ponadto w niektórych przypadkach do uruchomienia mechanicznych przełączników stykowych wymagane są znaczne siły mechaniczne.
Zalety i wady wyłączników zbliżeniowych
Powyższe okoliczności powodują konieczność opracowania urządzeń pozbawionych wspomnianych wad, a jednocześnie zdolnych do wykonywania podobnych funkcji. Takie są urządzenia Przełączniki zbliżeniowe, którego korzyściami są m.in.
-
znaczna trwałość przy wysokiej niezawodności i wysokiej dopuszczalnej częstotliwości pracy;
-
brak konieczności użycia siły mechanicznej podczas uruchamiania, mała wrażliwość na wibracje, przyspieszenia itp.;
-
niewielka wrażliwość parametrów na zmiany w stosunkowo szerokim zakresie warunków zewnętrznych;
-
poprawę warunków świadczenia usług operacyjnych.
Dzięki niskiemu poziomowi sprzężenia zwrotnego wyłącznika zbliżeniowego osiągnięto znaczne uproszczenie konstrukcji wyłącznika krańcowego przy zachowaniu wysokiej stabilności w czasie charakterystyk dokładnościowych. Dodatkowo brak styków elektrycznych i mechanicznych zapewnia bezpieczeństwo pożarowe i przeciwwybuchowe tych urządzeń, co znacznie poszerza obszar ich możliwego zastosowania.
Jedną z istotnych wad bezdotykowych wyłączników krańcowych jest złożoność wykonania wielu modyfikacji konstrukcyjnych, które są łatwe do wprowadzenia w mechanicznych wyłącznikach krańcowych.
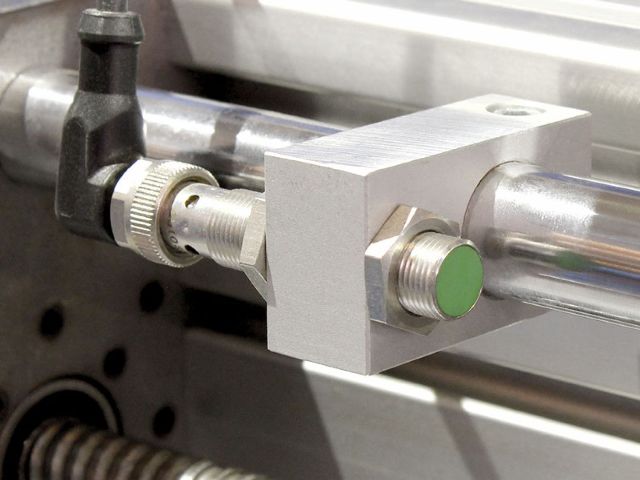
Urządzenie przełącznika zbliżeniowego
Zasada działania statycznych bezdotykowych łączników toru typu parametrycznego polega na wykorzystaniu zniekształcenia pola magnetycznego lub elektrycznego wytwarzanego przez element czuły, gdy w jego obszarze pojawi się element napędowy, w wyniku czego następuje stan niezrównoważenia występuje w obwodzie elektrycznym przełącznika i urządzenie wyjściowe zostaje wyzwolone.
Statyczne łączniki zbliżeniowe wykonuje się najczęściej z jednym obwodem wyjściowym, przy czym w niektórych wyłącznikach zadziałaniu towarzyszy pojawienie się sygnału na wyjściu (efekt przełączenia bezpośredniego), w innych zanik (efekt przełączenia odwrotnego), co jest równoważne odpowiednio do zamykania i otwierania styków mechanicznych ścieżek kontaktowych.
Jeśli w obwodzie przełącznika zbliżeniowego w trybie przekaźnika znajduje się element wzmacniający, parametr wyjściowy elementu czujnikowego może być w ciągłej funkcjonalnej zależności od kontrolowanego ruchu.
Obecnie stosuje się liczne modyfikacje konstrukcyjne wyłączników krańcowych bezdotykowych, różniące się poziomem czułości (wielkością szczeliny roboczej), położeniem szczeliny lub płaszczyzny elementu czułego względem płaszczyzny mocowania, kierunkiem przewodów prowadzących, liczby stopni elementu czujnikowego (w przypadku wersji ze szczelinami), głębokości szczeliny, długości przewodów łączących, poziomu napięcia zasilania, charakteru ochrony przed wpływami środowiska itp.
Możliwości zastosowania bezdotykowych wyłączników ruchu determinowane są parametrami ich właściwości elektrycznych i mechanicznych.
Parametry elektryczne obejmują:
- charakter sygnału wyjściowego i liczba obwodów wyjściowych;
- zużycie i moc wyjściowa;
- kształt sygnału wyjściowego; współczynnik przełączania dla rezystancji i napięcia (dla przełączników transformatorowych);
- charakterystyki czasowe (czasy wyzwalania i zwalniania) oraz częstotliwość strzelania (rozdzielczość);
- poziomów i kształtu napięcia zasilającego oraz dopuszczalnych granic ich odchyleń.
Mechaniczne parametry wydajności obejmują:
- czułość (wielkość szczeliny roboczej),
- wymiary i wymiary przyłączy;
- charakterystyki dokładności (błędy główne i dodatkowe) oraz różnica skoku;
- charakterystyka instalacji (rodzaje hamulców przełączających i sposób ich instalacji, poziom sprzężenia zwrotnego, sposób montażu i instalacji przełącznika);
- poziom ochrony przed hałasem.
Aby uzyskać więcej informacji na temat urządzenia i przełączników zbliżeniowych, zobacz tutaj: Bezkontaktowe czujniki położenia mechanizmów
Ivenski Yu N.Bezkontaktowe wyłączniki drogowe w automatyce przemysłowej