Co to jest liniowy transformator różnicowy
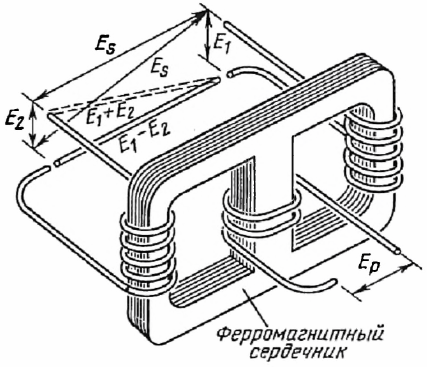
Prąd przemienny płynący w jednej cewce pierwotnej może być wykorzystany do indukowania napięcia przemiennego w dwóch cewkach wtórnych. Jeśli dwa uzwojenia wtórne mają identyczne charakterystyki i dwie ścieżki linii pola magnetycznego przechodzące przez te cewki są również identyczne, wówczas dwa generowane napięcia wtórne będą równe. Urządzenie o tej strukturze nazywa się transformatorem różnicowym.

Transformator różnicowy może mieć rdzeń powietrzny lub rdzeń magnetyczny.
Dwa uzwojenia wtórne można połączyć w fazie lub w przeciwfazie, w pierwszym przypadku ich napięcia są do siebie dodawane, aw drugim przypadku jedno od drugiego.
Uzwojenie pierwotne służy do napędzania dwóch symetrycznych uzwojeń wtórnych, z których to drugie może być połączone w taki sposób, że napięcia wtórne sumują się lub odejmują od siebie.
Jeśli dwie cewki są połączone zgodnie ze schematem odejmowania, to przy tych samych wartościach ich napięć całkowite napięcie wtórne wyniesie zero.Jeśli charakterystyka obwodu magnetycznego jednej z tych cewek zostanie celowo zmieniona w porównaniu z charakterystyką obwodu magnetycznego drugiej cewki, wówczas dwa napięcia wtórne będą się różnić, a ich różnica nie będzie równa zeru.
W tych warunkach faza całkowitego napięcia wtórnego wskazuje, która ścieżka linii pola magnetycznego ma największy opór, natomiast amplituda tego napięcia odzwierciedla wartość różnicy reluktancji.
Jeśli to samo działanie zostanie użyte do zwiększenia rezystancji magnetycznej jednego toru i zmniejszenia rezystancji magnetycznej drugiego toru, to odzwierciedlające to działanie napięcie wyjściowe osiągnie swoją maksymalną wartość, a funkcja przejścia będzie miała największą możliwą liniowość.
Ponieważ żadne dwa uzwojenia wtórne ani dwie ścieżki linii pola magnetycznego nie mogą być wykonane dokładnie tak samo, transformator różnicowy zawsze ma określone napięcie wyjściowe, nawet przy zerowym użytecznym sygnale na wejściu.
Ponadto charakterystyki obwodów magnetycznych są nieliniowe. W wyniku tej nieliniowości pojawiają się nawet składowe harmoniczne częstotliwości podstawowej przyłożonego napięcia pierwotnego wzbudzenia, których nie można w pełni skompensować w żadnym układzie uzwojeń wtórnych.
Reluktancja obwodu ferromagnetycznego ze szczeliną powietrzną jest funkcją szerokości szczeliny z silną nieliniowością. W rezultacie indukcyjność cewki nawiniętej wokół takiego obwodu jest również nieliniową funkcją szerokości szczeliny.
Jednocześnie, jeśli istnieją dwie mniej więcej identyczne ścieżki linii pola magnetycznego, każda ze szczeliną powietrzną, i jeśli szerokość jednej szczeliny zwiększa się wraz ze zmniejszaniem się szerokości drugiej, to różnica oporu magnetycznego tych ścieżki mogą zmieniać się wystarczająco liniowo.
Podstawowe zasady transformatora różnicowego są w praktyce realizowane w różnych konkretnych konfiguracjach projektowych do wielu różnych celów.
Liniowy zmienny transformator różnicowy (LVDT) jest pasywnym przetwornikiem (czujnikiem) działającym na zasadzie wzajemnej indukcji i może służyć do pomiaru przemieszczenia, odkształcenia, ciśnienia i ciężaru.
Najczęściej za pomocą NS można mierzyć przemieszczenie w zakresie od kilku milimetrów do centymetrów, bezpośrednio przetwarzając przemieszczenie na sygnał elektryczny.
Indukcyjność cewki, w pobliżu lub wewnątrz której znajduje się pręt ferromagnetyczny, jest funkcją współrzędnej położenia tego pręta względem cewki o silnej nieliniowości.
Jeśli taki pręt jest obwodem ferromagnetycznym jakiegoś transformatora różnicowego, to wtórne napięcie różnicowe może służyć jako wskaźnik przemieszczenia pręta, zależnego wystarczająco liniowo od tego przemieszczenia.
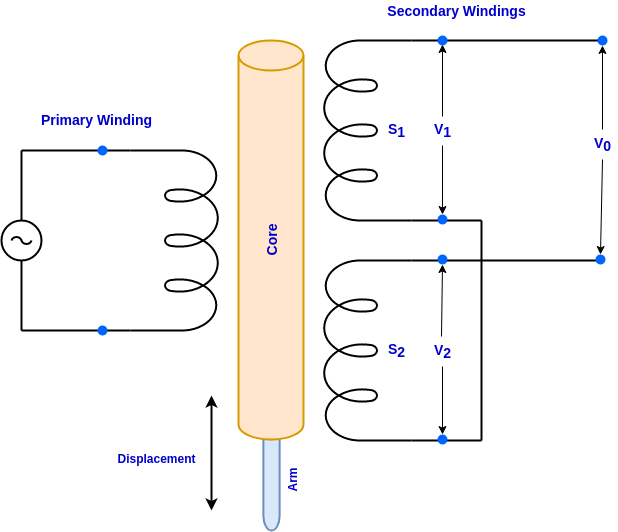
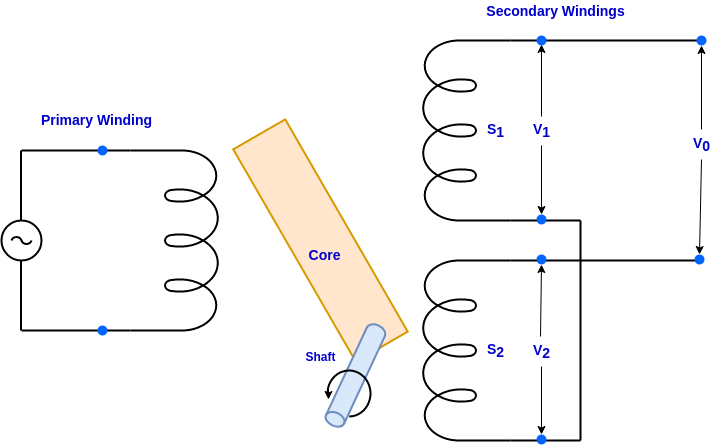
Uzwojenie pierwotne jest podłączone do źródła prądu przemiennego. Dwa uzwojenia wtórne S1 i S2 mają taką samą liczbę zwojów i są zamontowane szeregowo naprzeciw siebie.
Zatem pole elektromagnetyczne indukowane w tych uzwojeniach jest przesunięte w fazie względem siebie o 180°, a zatem ogólny efekt się znosi.

Położenie symetrycznego rdzenia ferromagnetycznego przewidzianego w konstrukcji transformatora różnicowego można określić na podstawie fazy i amplitudy napięcia wtórnego.
Bezwzględna różnica między dwoma napięciami wtórnymi wskazuje wartość bezwzględną przemieszczenia pręta względem środka lub położenia zerowego, a faza tego odmiennego napięcia wskazuje kierunek przesunięcia.
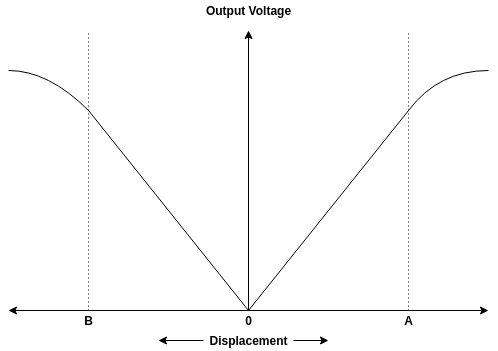
Krzywa B / I liniowego transformatora różnicowego jest pokazana na rysunku.
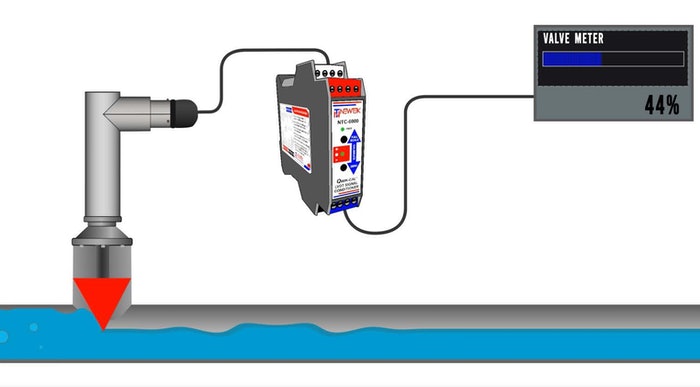
Przykład zastosowania liniowego transformatora różnicowego do zapewnienia dokładnego sprzężenia zwrotnego położenia do monitorowania i sterowania zaworami w zakładach chemicznych, elektrowniach i sprzęcie rolniczym:
Zatapialne czujniki przemieszczenia LVDT D5W:
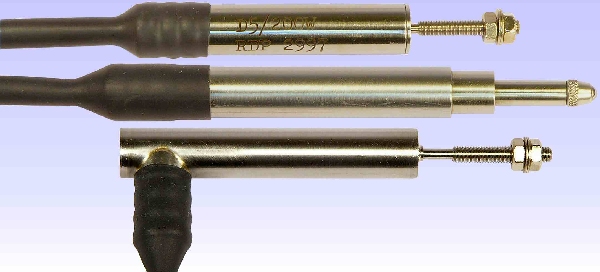
Przetworniki te przeznaczone są do pomiaru przemieszczenia i położenia. Zapewniają dokładny pomiar położenia zwory (części przesuwnej) względem obudowy czujnika przemieszczenia.
Zatapialne przetworniki przemieszczenia są przeznaczone do wykonywania pomiarów w zanurzeniu w odpowiednich cieczach. Ciecze niemagnetyczne mogą zalewać rurkę twornika bez wpływu na działanie przetwornicy. Przetwornice te są dostępne w wersjach niesterowanych lub ze sprężyną powrotną.
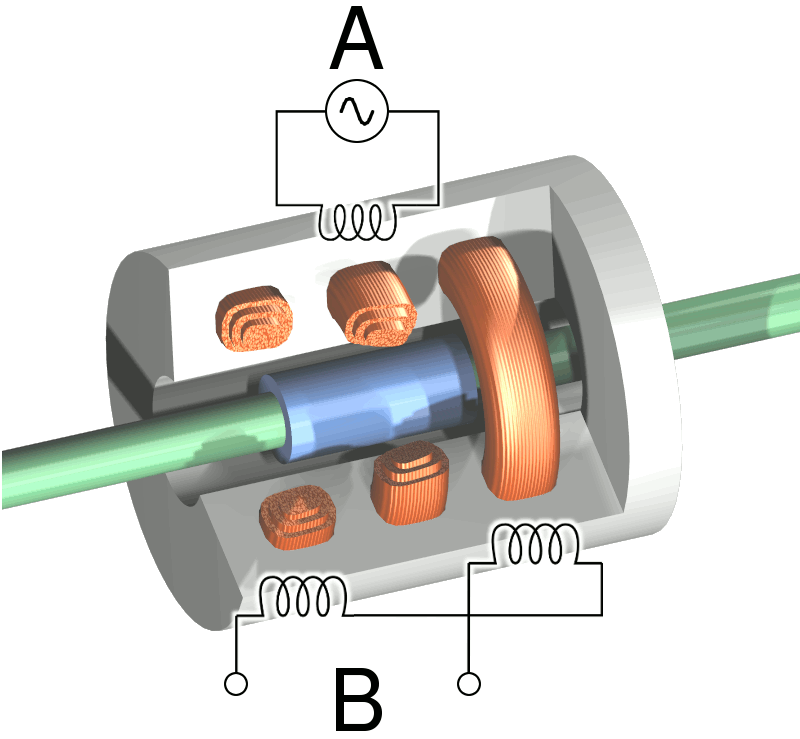
Podczas automatyzacji różnych procesów technologicznych często stosuje się przetwornice dwustronne z transformatorem różnicowym z rdzeniem ferromagnetycznym, który jest wkładany na swoich końcach w równych odległościach do dwóch cewek wtórnych.
Gdy pręt porusza się osiowo, przesuwa się głębiej w jedną z tych cewek i rozciąga się od drugiej.Bezwzględna różnica między dwoma napięciami wtórnymi wskazuje wartość bezwzględną przemieszczenia pręta względem środka lub położenia zerowego, a faza tego odmiennego napięcia wskazuje kierunek przesunięcia.
Obrotowy transformator różnicowy AC:
Obrotowy zmienny transformator różnicowy jest transformatorem pasywnym opartym na zasadzie wzajemnej indukcji. Służy do pomiaru przesunięcia kątowego.
Jego konstrukcja jest podobna do konstrukcji liniowego transformatora różnicowego, z wyjątkiem konstrukcji rdzenia.
Uzwojenie pierwotne jest podłączone do źródła prądu przemiennego. Dwa uzwojenia wtórne S1 i S2 mają taką samą liczbę zwojów i są zamontowane szeregowo naprzeciw siebie.
Zalety liniowego transformatora różnicowego:
-
Nie ma fizycznego kontaktu między rdzeniem a cewkami;
- Wysoka niezawodność;
-
Szybka odpowiedź;
-
Długa żywotność.
Jest to najczęściej stosowany czujnik indukcyjny ze względu na jego wysoką dokładność.