Charakterystyki mechaniczne silników elektrycznych i mechanizmów ich wytwarzania
 Podczas projektowania napędu elektrycznego należy tak dobrać silnik elektryczny, aby jego charakterystyka mechaniczna odpowiadała charakterystyce mechanicznej mechanizmu produkcyjnego. Charakterystyki mechaniczne określają zależność zmiennych w stanie ustalonym.
Podczas projektowania napędu elektrycznego należy tak dobrać silnik elektryczny, aby jego charakterystyka mechaniczna odpowiadała charakterystyce mechanicznej mechanizmu produkcyjnego. Charakterystyki mechaniczne określają zależność zmiennych w stanie ustalonym.
Mechaniczna charakterystyka mechanizmu nazywana jest zależnością prędkości kątowej od momentu oporu mechanizmu, zredukowanego do wału silnika) ω = f (Mc).
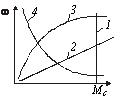
Ryż. 1. Charakterystyka mechaniczna mechanizmów
Wśród całej różnorodności istnieje kilka charakterystycznych typów właściwości mechanicznych mechanizmów:
1. Charakterystyka z momentem oporu niezależnym od prędkości (linia prosta 1 na rys. 1). Charakterystykę mechaniczną niezależną od prędkości rysuje się jako linię prostą równoległą do osi obrotu, w tym przypadku pionową. Taką charakterystykę posiadają np. dźwigi, wciągarki, pompy tłokowe o stałej wysokości podawania itp.
2.Charakterystyka z momentem oporu liniowo zależnym od prędkości (wiersz 2 na rys. 1). Zależność ta jest nieodłącznym elementem np. napędu niezależnie wzbudzonej prądnicy prądu stałego pracującej przy stałym obciążeniu.
3. Charakterystyka z nieliniowym wzrostem momentu obrotowego (krzywa 3 na rys. 1). Typowymi przykładami są działanie wentylatorów, pomp odśrodkowych, śmigieł. Dla tych mechanizmów moment Mc zależy od kwadratu prędkości kątowej ω... Jest to tzw paraboliczna (wentylatorowa) charakterystyka mechaniczna.
4. Charakterystyka z nieliniowo malejącym momentem oporu (krzywa 4 na rys. 1). Tutaj moment oporu jest odwrotnie proporcjonalny do prędkości obrotowej. W tym przypadku moc pozostaje stała w całym zakresie prędkości pracy mechanizmu. Na przykład w mechanizmach ruchu głównego niektórych maszyn do cięcia metalu (toczenie, frezowanie, wiercenie) moment Mc zmienia się odwrotnie proporcjonalnie do ω, a moc pobierana przez mechanizm pozostaje stała.
Charakterystykę mechaniczną silnika elektrycznego nazywamy zależnością jego prędkości kątowej od momentu obrotowego ωd = f (M). W tym miejscu należy pamiętać, że moment M na wale silnika, niezależnie od kierunku obrotów, ma znak dodatni — moment ruchu. Jednocześnie moment oporu Mc ma znak ujemny.
Jako przykłady, ryc. 2 przedstawia charakterystykę mechaniczną: 1 — silnik synchroniczny; 2 — silnik prądu stałego z niezależnym wzbudzeniem; 3 — Silnik prądu stałego ze wzbudzeniem szeregowym.
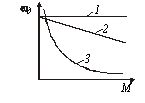 Ryż. 2. Charakterystyki mechaniczne silników elektrycznych
Ryż. 2. Charakterystyki mechaniczne silników elektrycznych
Do oceny właściwości charakterystyk mechanicznych napędu elektrycznego stosuje się pojęcie sztywności charakterystycznej.Sztywność charakterystyki mechanicznej jest określona przez wyrażenie
β = dM / dω
gdzie dM — zmiana momentu obrotowego silnika; dωd — odpowiednia zmiana prędkości kątowej.
Dla charakterystyk liniowych wartość β pozostaje stała, dla nieliniowych zależy od punktu pracy.
Korzystając z tej koncepcji, cechy pokazane na ryc. 2, można jakościowo ocenić następująco: 1 — bezwzględnie sztywny (β = ∞); 2 — stałe; 3 — miękkie.
Absolutnie trudna cecha — prędkość obrotowa silnika pozostaje niezmieniona, gdy obciążenie silnika zmienia się od zera do wartości nominalnej. Silniki synchroniczne mają tę cechę.
Sztywna charakterystyka — prędkość obrotowa zmienia się nieznacznie, gdy obciążenie zmienia się od zera do wartości nominalnej. Charakterystykę tę posiada silnik prądu stałego o wzbudzeniu równoległym oraz silnik indukcyjny w obszarze liniowej części charakterystyki.
Za charakterystykę sztywną uważa się taką, w której zmiana prędkości nie przekracza około 10% prędkości znamionowej, gdy obciążenie zmienia się od zera do wartości znamionowej.
Charakterystyka miękka — prędkość silnika zmienia się znacznie przy stosunkowo niewielkich zmianach obciążenia. Cechę tę posiada silnik prądu stałego o wzbudzeniu szeregowym, mieszanym lub równoległym, ale z dodatkową rezystancją w obwodzie twornika oraz asynchroniczny z rezystancją w obwodzie wirnika.
W przypadku większości mechanizmów produkcyjnych stosowane są asynchroniczne silniki klatkowe, które mają sztywne właściwości mechaniczne.
Wszystkie właściwości mechaniczne silników elektrycznych są podzielone na naturalne i sztuczne.
Naturalne właściwości mechaniczne odnoszą się do warunków pracy silnika przy nominalnych wartościach parametrów.
Na przykład dla silnika o wzbudzeniu równoległym naturalną charakterystykę można wykreślić dla przypadku, gdy napięcie twornika i prąd wzbudzenia mają wartości nominalne i nie ma dodatkowej rezystancji w obwodzie twornika.
Charakterystyka naturalna silnika indukcyjnego odpowiada napięciu znamionowemu i częstotliwości znamionowej prądu przemiennego dostarczanego do stojana silnika, pod warunkiem, że w obwodzie wirnika nie występuje dodatkowa rezystancja.
W ten sposób dla każdego silnika można zbudować tylko jedną cechę naturalną i nieograniczoną liczbę sztucznych. Na przykład każda nowa wartość rezystancji twornika silnika prądu stałego lub w obwodzie wirnika silnika indukcyjnego ma swoją własną charakterystykę mechaniczną.
