Podstawowe parametry i charakterystyki przekaźników elektromagnetycznych
 Nazywa się urządzenie elektryczne, które stosuje prawo sterowania przekaźnikiem przekaźnik... W przekaźniku, gdy parametr sterujący (wejściowy) jest płynnie zmieniany do określonej wartości zadanej, parametr kontrolowany (wyjściowy) zmienia się gwałtownie. Ponadto co najmniej jeden z tych parametrów musi być elektryczny.
Nazywa się urządzenie elektryczne, które stosuje prawo sterowania przekaźnikiem przekaźnik... W przekaźniku, gdy parametr sterujący (wejściowy) jest płynnie zmieniany do określonej wartości zadanej, parametr kontrolowany (wyjściowy) zmienia się gwałtownie. Ponadto co najmniej jeden z tych parametrów musi być elektryczny.
Działanie narządów czynnościowych przekaźnik elektromagnetyczny można prześledzić zgodnie ze schematem na ryc. 1. Korpus odbiorczy A przetwarza wartość wejściową (napięcie) Uin dostarczoną do cewki 2 obwodu magnetycznego 1 na wartość pośrednią, tj. w sile mechanicznej kotwy 3. Siła mechaniczna kotwy Fß działa na układ kontaktowy korpusu wykonawczego B. Wartość pośrednia — siła kotwicy Fß, jest proporcjonalna do wprowadzonej wartości Uin, jest porównywana z zadaną wartość siły Fpr wytworzonej przez sprężynę 9 członu pośredniego B. Gdy Uin <Uav, Fya
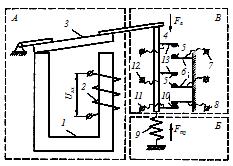 Ryż. 1 Schemat przekaźnika elektromagnetycznego
Ryż. 1 Schemat przekaźnika elektromagnetycznego
W trakcie pracy przekaźnik elektromagnetyczny na skali czasowej wyróżnia cztery fazy: okres (czas) zadziałania tav, okres pracy twork, okres (czas) wyłączenia toff, okres (czas) spoczynku tp (rys. 2).
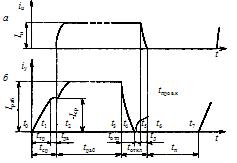
Ryż. 2. Zależność wielkości produkcji (a) i produkcji (b) od czasu
Okres zadziałania przekaźnika elektromagnetycznego
 Okres odpowiedzi obejmuje czas od momentu, w którym sygnał wejściowy zaczyna oddziaływać na korpus monitorujący do momentu pojawienia się sygnału w kontrolowanym obwodzie. Segment osi odciętych tav = t2 –t0 odpowiada temu okresowi na ryc. 2, b. W chwili t0 prąd w cewce przekaźnika wzrasta do wartości, przy której siła elektromagnetyczna Fe działająca na twornik zaczyna przeciwstawiać się sile sprężystej Fm (siła mechaniczna) członu pośredniego. Wartość wejściowa jest wtedy nazywana wartością akceptacji.
Okres odpowiedzi obejmuje czas od momentu, w którym sygnał wejściowy zaczyna oddziaływać na korpus monitorujący do momentu pojawienia się sygnału w kontrolowanym obwodzie. Segment osi odciętych tav = t2 –t0 odpowiada temu okresowi na ryc. 2, b. W chwili t0 prąd w cewce przekaźnika wzrasta do wartości, przy której siła elektromagnetyczna Fe działająca na twornik zaczyna przeciwstawiać się sile sprężystej Fm (siła mechaniczna) członu pośredniego. Wartość wejściowa jest wtedy nazywana wartością akceptacji.
Początkowy okres odpowiada segmentowi ttr = t1 — t0. W chwili t1 zwora elektromagnesu przekaźnika zaczyna się poruszać. W czasie tdv = t2 — t1 kotwica porusza się, pokonując opór ciała pośredniego B (patrz rys. 1) i uruchamiając ciało wykonawcze C.
Pod koniec skoku twornika styki napędu zamykają się, prąd obciążenia w (ryc. 2, a) zaczyna rosnąć od zera do wartości równowagi. Wartość wejściowa, od której rozpoczyna się regulacja obwodu wyjściowego, nazywana jest wartością akceptacji (Iav). Moc Psr odpowiadająca Isr nazywana jest mocą uruchamiającą.
Czas odpowiedzi t cf = ttr + tdv.
Czas odpowiedzi przekaźników elektromagnetycznych waha się od 1-2 do 20 ms. Elektromagnetyczne przekaźniki czasowe zapewniają opóźnienie do 10 s.
Do oszacowania czasu odpowiedzi przekaźnika dopuszczalne jest użycie wyrażenia
t cf = t1kz-bm –a,
gdzie t1 to czas odpowiedzi dla danego współczynnika bezpieczeństwa ks i współczynnika m = 1; a, b — współczynniki, które są określane w zależności od typu przekaźnika i wartości kz i m.
Dla szybkich przekaźników przy kz = 1,5¸2 wartość współczynnika a zbliża się do jedności. Dla zwykłych przekaźników o k z = 1,5¸3, wartości a = 0,25¸0,95, wartość współczynnika b mieści się zazwyczaj w przedziale 1,4-1,6.
Okres działania przekaźnika elektromagnetycznego
 Okres pracy obejmuje przedział czasu twork = t3 — t2, tj. czas od momentu wysterowania obwodu wyjściowego t2 do momentu ustania oddziaływania na narząd wrażliwy sygnału wejściowego t3. Prąd zaczyna rosnąć do stacjonarnej wartości Ipraca (ryc. 2, b) — jest to wartość robocza wartości wejściowej, która zapewnia niezawodne działanie przekaźnika.
Okres pracy obejmuje przedział czasu twork = t3 — t2, tj. czas od momentu wysterowania obwodu wyjściowego t2 do momentu ustania oddziaływania na narząd wrażliwy sygnału wejściowego t3. Prąd zaczyna rosnąć do stacjonarnej wartości Ipraca (ryc. 2, b) — jest to wartość robocza wartości wejściowej, która zapewnia niezawodne działanie przekaźnika.
Stosunek Ipraca / Icr = kz nazywany jest współczynnikiem bezpieczeństwa pracy.
Do scharakteryzowania przeciążalności elementu czułego przekaźnika wykorzystuje się wartość wielkości wejściowej, którą nazywa się wartością graniczną wielkości roboczej Ioperating.max.
Ograniczenie wartości roboczej — jest to jej wartość, którą wrażliwy narząd może wytrzymać przez krótki znormalizowany okres czasu. Jednak wartość tej wartości jest niedopuszczalna przy normalnej pracy przekaźnika ze względu na stan wytrzymałości elektrycznej lub mechanicznej lub nagrzewanie.
Koncepcja mocy sterującej Ru służy do scharakteryzowania obciążalności napędu przekaźnikowego. Moc sterująca to moc w kontrolowanym obwodzie, którą przemiennik może przesyłać przez długi czas.
Okres wyzwalania przekaźnika elektromagnetycznego
 Okres wyłączenia zawiera przedział czasu toff = t6 — t3, tj. czas od momentu ustania oddziaływania na narząd postrzegający t3 do momentu, w którym prąd w kontrolowanym obwodzie spada do zera (ryc. 16, a).
Okres wyłączenia zawiera przedział czasu toff = t6 — t3, tj. czas od momentu ustania oddziaływania na narząd postrzegający t3 do momentu, w którym prąd w kontrolowanym obwodzie spada do zera (ryc. 16, a).
Okres wyłączenia obejmuje okres zwolnienia totp = t4 — t3, w którym przekaźnik jest wyłączony. Prąd iy w cewce przekaźnika spada do zera (ryc. 2, b). W tym okresie przeciwstawna siła sprężyny (siła mechaniczna) przewyższa siłę elektromagnetyczną, tj. Fm> Fe i twornik zostaje zwolniony.
Po wybraniu awarii styku (czas tc = t5 — t4) styki przekaźnika otwierają się i między nimi zapala się łuk, który gaśnie po czasie td = t6 — t5. W okresie td prąd w kontrolowanym obwodzie spada od In do zera (ryc. 2, a).
Czas wyłączenia t t = tp + tc + td.
Okres wyzwalania charakteryzuje się współczynnikiem regeneracji, który jest stosunkiem prądu opadania Iotp do prądu zadziałania Iav: kv = Iotp / Icr.
Zazwyczaj dla przekaźników zabezpieczeniowych systemu elektroenergetycznego i przekaźników sterujących, które kontrolują parametr wejściowy w wąskich granicach, kv powinno być bliższe jedności.
Okres spoczynku przekaźnika elektromagnetycznego
Okres spoczynku to przedział czasu tp = t7 — t6.
Okres latencji charakteryzuje się parametrem zwanym wartością nieoperacyjną, która jest największą wartością wielkości wejściowej zapewniającej brak zadziałania lub podtrzymania przekaźnika. Czas wyłączenia jest krótszy niż czas rozruchu i czas zwolnienia.
Stosunek mocy sterowania do mocy uruchamiania nazywa się wzmocnieniem, ku = Py / Pcr.
Liczba uruchomień na jednostkę czasu jest określona przez wartość, która jest odwrotnie proporcjonalna do czasu cyklu:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
Lakota OB