Napęd elektryczny wciągarek elektrycznych i belek podsuwnicowych
 Wózki elektryczne podwieszane (wciągniki elektryczne, wciągniki i belki podsuwnicowe) służą do podnoszenia i przemieszczania ładunków oraz części maszyn podczas prac montażowych i remontowych w obiektach przemysłowych. Wciągniki, wciągniki i suwnice elektryczne są mniejsze od suwnic pomostowych, co zmniejsza rozmiary budynków przemysłowych, a ich konserwacja nie wymaga wykwalifikowanego personelu.
Wózki elektryczne podwieszane (wciągniki elektryczne, wciągniki i belki podsuwnicowe) służą do podnoszenia i przemieszczania ładunków oraz części maszyn podczas prac montażowych i remontowych w obiektach przemysłowych. Wciągniki, wciągniki i suwnice elektryczne są mniejsze od suwnic pomostowych, co zmniejsza rozmiary budynków przemysłowych, a ich konserwacja nie wymaga wykwalifikowanego personelu.
Wózki elektryczne podwieszane przeznaczone są do podnoszenia i przemieszczania towarów w obiektach produkcyjnych po ściśle określonej ścieżce.
Wózek elektryczny (rys. 1) składa się z 3 głównych części: mechanizmu podnoszącego (wciągnika elektrycznego) przeznaczonego do podnoszenia (opuszczania) i utrzymywania ładunku, mechanizmu ruchu (podwozia) przeznaczonego do przesuwania podniesionego ładunku w ściśle określonym kierunku położenia , kolejka jednoszynowa, która definiuje ruch poziomy w dwóch kierunkach.
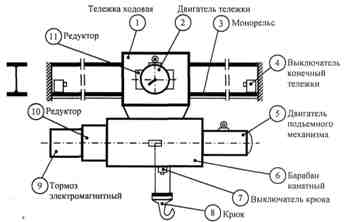
Ryż. 1. Schemat kinematyczny podwieszonego wózka elektrycznego
Wciągnik elektryczny jest zamontowany na wózku roboczym i zawiera następujące wyposażenie: silnik elektryczny (5) mechanizmu podnoszącego, przekładnię walcową (10) do zmniejszania prędkości obrotowej silnika elektrycznego do wartości zapewniającej zadaną prędkość liniową podnoszenie (opuszczanie) haka, hamulec elektromagnetyczny (9), do zatrzymania silnika wału w przypadku odłączenia go od sieci lub zaniku napięcia w sieci, uruchamiany jest hamulec hamujący, działający siłą sprężyn, gdy wały są owinięte wokół wału, wyłącznik krańcowy (7) haka, aby ograniczyć podnoszenie haka, po naciśnięciu silnik jest odłączany od sieci i zwalnia, bęben linowy (6), do nawijania ( rozwijania) i przechowywania liny, haka (8), do zabezpieczenia podniesionego ładunku .
Podwozie zamocowane jest na torze jednoszynowym (3), wspartym kołami jezdnymi na dolnych półkach szyny podwójnej. Napędzanie kół przez cylindryczną przekładnię (11) za pomocą silnika elektrycznego (2).
Kolej jednoszynowa — belka dwuteowa z wyłącznikami krańcowymi (4) na końcach w celu ograniczenia ruchu poziomego.
Wciągnik elektryczny TEP-1 (udźwig 1 t, napięcie 380 V) składa się z mechanizmów podnosząco-przesuwnych z indywidualnymi napędami elektrycznymi. Bęben roboczy 2 jest napędzany przez silnik 20 poprzez przekładnię planetarną składającą się z satelitów 5, 7, 8, kół zębatych blokowych 13, kół słonecznych 6, 9, jarzma 14, 15. Główny wał napędowy 4 przy wyłączonym silniku jest zatrzymywany przez tarcze 10 pod działaniem sprężyny 11.
Do napędzania mechanizmu podnoszącego z prędkością 6,5-6,9 m/s zastosowano silnik asynchroniczny o zwiększonym poślizgu typu AOS-32-4M (moc 1,4 kW przy 1320 obr./min i współczynniku wypełnienia = 25%).Ruch haka w górę jest ograniczony wyłącznikiem krańcowym.
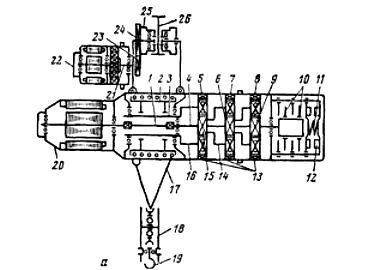
Ryż. 2. Napęd elektryczny wciągnika elektrycznego TEP -1: 1 — bęben roboczy, 3 — wał drążony, 4 — wał roboczy, 5, 7, 8 — satelity, 6, 9, 15 — koła słoneczne, 10 — tarcze hamulcowe, 11 — sprężyna hamulcowa, 12 — elektromagnesy, 13 — przekładnie blokowe, 14, 16, 21 — nośniki, 17 — linka, 18 — zawieszenie, 19 — hak, 20 — silnik elektryczny podnoszenia ładunku, 22 — silnik elektryczny wózka, 23, 24 — przekładnie, 25 — rolka, 26 — kolejka jednoszynowa.
Rysunek 3 przedstawia działanie podnośnika. Sprawność wciągnika elektrycznego wzrasta do 0,58, gdy masa podnoszonego ładunku wzrasta do 1000 kg.
Ciekawy tryb pracy silnika nr 4 podczas opuszczania ładunku: przy masie ładunku poniżej 425 kg silnik elektryczny pracuje w trybie silnikowym, a przy masie powyżej 425 kg — w trybie generatorowym. Dlatego, aby pokonać moment jałowy mechanizmu podnoszącego, wystarczy ładunek o wadze 425 kg.
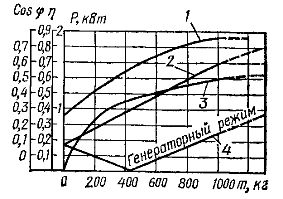
Ryż. 3. Charakterystyki eksploatacyjne wciągnika elektrycznego: 1 — ssphi silnika elektrycznego, 2 — moc silnika elektrycznego podczas podnoszenia ładunku, 3 — sprawność, 4 — moc silnika elektrycznego podczas opuszczania ładunku.
Do napędu podwozia elektrycznego wciągnika zastosowano asynchroniczny silnik elektryczny 22 (rys. 2) typu TEM-0,25 (moc 0,25 kW przy 1410 obr/min i współczynniku pracy = 25%) z zabudowaną jednostopniową przekładnią planetarną oraz przekładnia 23, 24 przenosząca obrót rolek 25. Urządzenia hamujące nie są montowane na mechanizmach ruchu najprostszych wciągników. Ruch wciągnika wzdłuż belki w obu kierunkach jest ograniczony ogranicznikami mechanicznymi.
 Żuraw różni się od wciągnika tym, że belka, po której porusza się wciągnik, może poruszać się po hali produkcyjnej, napędzana silnikiem elektrycznym klatkowym lub wirnikiem fazowym. Most belkowy podsuwnicy, który posiada elektryczny mechanizm napędowy, wykonany jest w postaci pojedynczej belki, po której porusza się podwozie elektryczne.
Żuraw różni się od wciągnika tym, że belka, po której porusza się wciągnik, może poruszać się po hali produkcyjnej, napędzana silnikiem elektrycznym klatkowym lub wirnikiem fazowym. Most belkowy podsuwnicy, który posiada elektryczny mechanizm napędowy, wykonany jest w postaci pojedynczej belki, po której porusza się podwozie elektryczne.
Silniki asynchroniczne trójfazowe z wirnikiem klatkowym służą do napędu przyczep elektrycznych samochodów i tylko o dużej nośności oraz konieczności regulacji prędkości i płynnego „lądowania” silników asynchronicznych obciążenia z wirnikiem fazowym.
Ze względu na brak niskich prędkości niezbędnych do płynnego lądowania ładunków lub dokładnego zatrzymania żurawia, pracownik musi okresowo włączać i wyłączać silniki elektryczne, a to zwiększa liczbę rozruchów i powoduje nagrzewanie się uzwojeń, a także zmniejsza odporność na zużycie styków. Dlatego na niektórych żurawiach występują elektryczne napędy podnoszenia i jazdy z dwiema prędkościami roboczymi: nominalną i zredukowaną, które są zapewnione przez zastosowanie dwubiegowych silników asynchronicznych zamiast jednobiegowych lub dodatkowego mikronapędu.
 Niskoobrotowe (0,2 — 0,5 m / s) podwieszane wózki elektryczne napędzane silnikami klatkowymi są zwykle sterowane z poziomu podłogi (gruntu) za pomocą zawieszonych stacje przyciskowe… W wózkach powietrznych i dźwigach z kabiną dla operatora (przy prędkości 0,8 — 1,5 m / s) silniki z wirnikiem fazowym są sterowane przez sterowniki.
Niskoobrotowe (0,2 — 0,5 m / s) podwieszane wózki elektryczne napędzane silnikami klatkowymi są zwykle sterowane z poziomu podłogi (gruntu) za pomocą zawieszonych stacje przyciskowe… W wózkach powietrznych i dźwigach z kabiną dla operatora (przy prędkości 0,8 — 1,5 m / s) silniki z wirnikiem fazowym są sterowane przez sterowniki.
Silniki elektryczne wciągników i suwnic są sterowane przez odwracalne rozruszniki magnetyczne i przyciski startowe zawieszone na elastycznym opancerzonym kablu.Napięcie na cewkach i stykach styczników do podnoszenia KM1 (ryc. 4), opuszczania KM2, przesuwania KMZ do przodu i do tyłu KM4 jest dostarczane przez wyłącznik automatyczny i kabel lub przewody jezdne. Ruch urządzenia podnoszącego w górę jest ograniczony wyłącznikiem krańcowym. SQ.
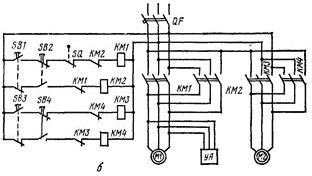
Ryż. 4. Schemat elektryczny belki podsuwnicowej
Blokowanie styczników nawrotnych silników przed równoczesnym załączeniem odbywa się za pomocą przycisków dwuobwodowych oraz mechanicznego blokowania samych styczników (lub otwierania styków pomocniczych styczników).
We wciągnikach elektrycznych i suwnicach przyciski startowe nie są pomijane przez odpowiednie zamykające się styki blokujące stycznika, co uniemożliwia kontynuowanie pracy wciągnika po zwolnieniu przez operatora stacji z przyciskiem. Równocześnie z silnikiem podnoszącym uruchamiany jest elektromagnes UA, który otwiera hamulec.
Maksymalny dopuszczalny czas uruchomienia mechanizmów podnoszących wynosi 3 — 5 s, dla mechanizmów ruchu — 10 — 15 s.
Możesz także zobaczyć: Wyposażenie elektryczne i łańcuchy wciągników elektrycznych
Sposób działania silników wózków elektrycznych, wciągników elektrycznych i suwnic zależy od ich przeznaczenia. Jeśli towary są przemieszczane na suwnicach mostowych na krótkich dystansach, to silniki pracują w niechlubnym trybie krótkotrwałym (na przykład w wózkach obsługujących sekcje warsztatów lub magazynów).

Dla suwnic przewożących towary na terenie zakładu na stosunkowo duże odległości tryby pracy silników podnoszenia i poruszania są różne: pierwszy charakteryzuje się trybem krótkotrwałym, drugi trybem długotrwałym. silników do podnoszenia i przemieszczania wciągników elektrycznych, wciągników i suwnic bramowych określa się w taki sam sposób jak w przypadku silników mechanizmów suwnic.