Dobór silników elektrycznych do napędów pomocniczych maszyn do obróbki skrawaniem metali
 Napędy pomocnicze w obrabiarkach (szybkie napędy zacisków, podkładek głowicy, poprzeczek itp.) zazwyczaj pracują w trybie obciążenia krótkotrwałego. Tryb pracy napędu elektrycznego o takim czasie trwania, w którym temperatura wszystkich urządzeń wchodzących w skład napędu elektrycznego nie osiąga podczas pracy wartości stacjonarnej, a podczas przerwy spada do temperatury otoczenia, nazywa się krótkotrwałym.
Napędy pomocnicze w obrabiarkach (szybkie napędy zacisków, podkładek głowicy, poprzeczek itp.) zazwyczaj pracują w trybie obciążenia krótkotrwałego. Tryb pracy napędu elektrycznego o takim czasie trwania, w którym temperatura wszystkich urządzeń wchodzących w skład napędu elektrycznego nie osiąga podczas pracy wartości stacjonarnej, a podczas przerwy spada do temperatury otoczenia, nazywa się krótkotrwałym.
Czas pracy napędów pomocniczych w maszynach do cięcia metalu jest zazwyczaj krótki; nie przekracza 5 — 15 s, a tylko dla ciężkich maszyn osiąga 1 — 1,5 minuty. W tym czasie (t < 0,1T) przy przeciążeniu w dopuszczalnych granicach silnik elektryczny nie ma czasu na rozgrzanie się nawet do normalnego przegrzania. Moc znamionowa silnika elektrycznego w tym przypadku jest określona przez warunki przeciążenia.
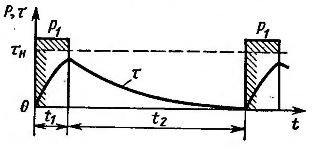
Ryż. 1. Krzywa obciążenia dla pracy krótkotrwałej
Moment oporu Mc podczas pracy napędów pomocniczych jest tworzony głównie przez siły tarcia, dlatego napędy te, w przeciwieństwie do napędów ruchu głównego, wymagają znacznego momentu rozruchowego.
Zużyta moc do pokonania sił tarcia podczas przemieszczania poziomo poruszającego się elementu maszyny:

gdzie Ftp — siła tarcia, N; v — prędkość, m/s; G — grawitacja (ciężar) przemieszczanej jednostki, N; μ — współczynnik tarcia ruchu.
Moc na wale silnika P = Ptr /η,
gdzie η — c. Transmisja PD, typowo η = 0,1 — 0,2.
Nagrzewanie się silnika elektrycznego podczas pracy w rozpatrywanym trybie jest nieznaczne. Dlatego zaleca się stosowanie jego dopuszczalnego przeciążenia.
Moc znamionowa Pn = Ptr /(λη),
gdzie λ — współczynnik dopuszczalnego przeciążenia.
Z grubsza można uznać, że charakterystyka silnika w jego części roboczej jest wyraźna. Następnie prędkość kątowa silnika w trybie przeciążenia
ωλ = ωО (1 — λсн),
gdzie, ωО = (πнО)/30- synchroniczna prędkość kątowa silnika elektrycznego.
Korzystając ze wzoru Pn = Ptr /(λη), znajdź moment przeciążenia silnika
Moment oporu na początku rozruchu silnika jest większy niż podczas jego pracy. Ten moment
gdzie μО — współczynnik tarcia w spoczynku.
Procedura doboru silników elektrycznych napędów pomocniczych maszyny
Najpierw ze wzoru Pn = Ptr /(λη) wybiera się z katalogu silnik elektryczny, dla którego następnie wyznacza się moment rozruchowy Mnach. Oblicz moment Mso według wzoru i porównaj z momentem Mnach.Jeżeli 0,85 Mnig> Mso, to wybrany silnik nadaje się do napędu pomocniczego.
W podobny sposób obliczane są napędy zespołów maszyn obracających i podnoszących, tylko w tym drugim przypadku główny ładunek jest często tworzony przez siłę ciężkości (ciężar) przemieszczanego zespołu.
Szczególnie ważne jest dobranie optymalnej prędkości obrotowej, aby szybko zbliżyć narzędzie do przedmiotu obrabianego. Podczas zbliżania się do narzędzia szybki ruch jest zastępowany powolnym ruchem z prędkością skrawania. Ta zmiana prędkości ma miejsce, gdy narzędzie znajduje się w pewnej odległości od części, w przeciwnym razie narzędzie uderzy w część z dużą prędkością i pęknie.
Przejście z jednej prędkości do drugiej zajmuje trochę czasu. W tym czasie urządzenia elektryczne są uruchamiane, a ruch odbywa się z dużą prędkością.Czas reakcji urządzeń zmienia się pod wpływem wahań napięcia i wpływu innych czynników losowych.
Optymalną prędkość zapewnia odpowiedni dobór przełożeń w łańcuchu kinematycznym. Dalsza redukcja czasu jest możliwa poprzez stopniowe lub płynne automatyczne zmniejszanie prędkości końcowego odcinka drogi, co umożliwia przyjęcie wyższej prędkości początkowej.