Uzwojenia stojana i wirnika maszyn elektrycznych prądu przemiennego
Uzwojenie wyrobu elektrycznego (urządzenia) — zespół cewek lub cewek umieszczonych w określony sposób i połączonych, przeznaczonych do wytworzenia lub wykorzystania pola magnetycznego albo do uzyskania określonej wartości rezystancji wyrobu (urządzenia) elektrycznego. wyrobu (urządzenia) elektrycznego — cewka wyrobu (urządzenia) elektrycznego lub jego część, wykonana jako oddzielna jednostka konstrukcyjna (GOST 18311-80).
Artykuł mówi o urządzeniu uzwojeń stojana i wirnika maszyn elektrycznych z prądem przemiennym.
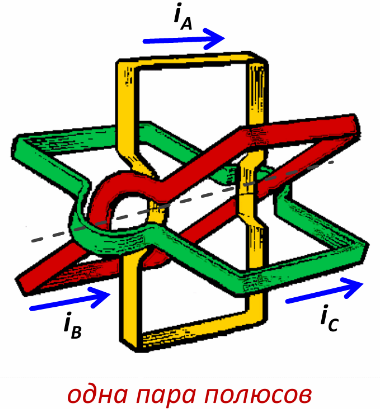
Układ przestrzenny uzwojeń stojana:
 Wirnik klatkowy:
Wirnik klatkowy:
Stojan z dwunastoma żłobkami, w każdym z których ułożony jest jeden drut, pokazano schematycznie na ryc. 1, za. Połączenia między przewodami linkowymi są wskazane tylko dla jednej z trzech faz; początek faz A, B, C cewki są oznaczone jako C1, C2, C3; końce — C4, C5, C6.Części cewki ułożone w kanałach (część czynna cewki) są konwencjonalnie pokazane w postaci prętów, a połączenia między drutami w rowkach (połączenia końcowe) są pokazane jako linia ciągła.
Rdzeń stojana ma kształt wydrążonego cylindra, który jest stosem lub szeregiem stosów (oddzielonych kanałami wentylacyjnymi) wykonanych z blach ze stali elektrotechnicznej. Na małych i średnich maszynach każdy arkusz jest tłoczony w formie pierścienia z rowkami wzdłuż wewnętrznego obwodu. na ryc. 1, b, podano blachę stojana z rowkami jednej z zastosowanych form.
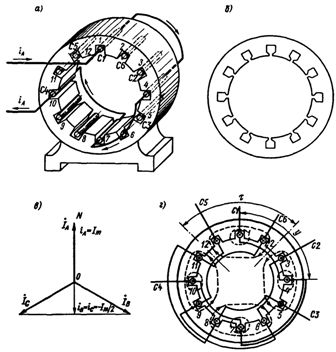
Ryż. 1. Położenie uzwojenia w żłobkach stojana i rozkład prądów w przewodach
Niech chwilowa wartość prądu iA pierwszej fazy w pewnym momencie będzie maksymalna, a prąd będzie kierowany od początku fazy C1 do jej końca C4. Uznamy ten prąd za dodatni.
Określając chwilowe prądy w fazach jako rzut wektorów wirujących na ustaloną oś ON (ryc. 1, c), otrzymujemy, że prądy faz B i C w danym momencie są ujemne, to znaczy są skierowane od końca faz do początku.
Prześledźmy to na ryc. 1d powstawanie wirującego pola magnetycznego. W danym momencie prąd fazy A jest kierowany od początku do końca, to znaczy, jeśli w przewodach 1 i 7 opuszcza nas poza płaszczyznę rysunku, to w przewodach 4 i 10 wychodzi za płaszczyznę rysunku do nas (patrz ryc. 1, a i d).
W fazie B prąd w tym momencie przepływa od końca fazy do jej początku.Łącząc przewody drugiej fazy zgodnie z próbką pierwszej, można uzyskać, że prąd fazy B przepływa przez przewody 12, 9, 6, 3; jednocześnie przez przewody 12 i 6 prąd opuszcza nas poza płaszczyznę rysunku, a przez przewody 9 i 3 - do nas. Obraz rozkładu prądów w fazie C uzyskujemy na podstawie próbki z fazy B.
Kierunki prądów podano na ryc. 1, re; linie przerywane przedstawiają linie pola magnetycznego generowanego przez prądy stojana; kierunki linii są określone przez regułę śruby prawoskrętnej. Z rysunku widać, że druty tworzą cztery grupy o tych samych kierunkach prądu, a liczba biegunów 2p układu magnetycznego wynosi cztery. Obszary stojana, w których linie magnetyczne opuszczają stojan, to bieguny północne, a obszary, w których linie magnetyczne wchodzą do stojana, to bieguny południowe. Łuk koła stojana zajęty przez jeden biegun nazywa się separacją biegunów.
Pole magnetyczne w różnych punktach na obwodzie stojana jest różne. Wzorzec rozkładu pola magnetycznego wzdłuż obwodu stojana jest okresowo powtarzany przez każdą dwubiegunową separację.Kąt łuku 2 przyjęty jako 360 stopni elektrycznych. Ponieważ wokół obwodu stojana znajduje się p podwójnych biegunów, 360 stopni geometrycznych równa się 360 p stopni elektrycznych, a jeden stopień geometryczny równa się p stopni elektrycznych.
na ryc. 1d pokazuje linie magnetyczne dla pewnego ustalonego momentu w czasie. Jeśli spojrzymy na obraz pola magnetycznego przez kilka kolejnych chwil, możemy się upewnić, że pole wiruje ze stałą prędkością.
Znajdźmy prędkość obrotową pola.Po czasie równym połowie okresu prądu przemiennego kierunki wszystkich prądów są odwracane, dzięki czemu bieguny magnetyczne są odwrócone, to znaczy w połowie okresu pole magnetyczne obraca się o ułamek obrotu. Prędkość obrotowa pola magnetycznego stojana, czyli prędkość synchroniczna, wynosi (w obrotach na minutę)

Liczba p par biegunów może być tylko liczbą całkowitą, dlatego przy częstotliwości np. 50 Hz prędkość synchroniczna może być równa 3000; 1500; 1000 obr/min itp.
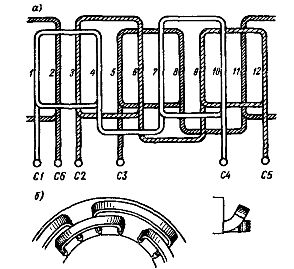
Ryż. 2. Szczegółowy schemat trójfazowego uzwojenia jednowarstwowego
Uzwojenia maszyny prądu przemiennego można podzielić na trzy grupy:
1) rolka do szpuli;
2) rdzeń;
3) specjalny;
Specjalne cewki obejmują:
a) zwarcie w postaci klatki wiewiórki;
b) uzwojenie silnika asynchronicznego z przełączaniem na inną liczbę biegunów;
c) uzwojenie silnika asynchronicznego z antypołączeniami itp.
Oprócz powyższego podziału cewki różnią się szeregiem innych cech, a mianowicie:
1) ze względu na rodzaj wykonania — ręczne, wzorzyste i półwzorzyste;
2) według lokalizacji w rowku - jednowarstwowe i dwuwarstwowe;
3) według liczby żłobków na biegun i fazę — uzwojenia o liczbie całkowitej q żłobków na biegun i fazę oraz uzwojenia o liczbie ułamkowej q.
Cewka to obwód utworzony przez dwa przewody połączone szeregowo. Sekcja lub uzwojenie to szereg zwojów połączonych szeregowo, umieszczonych w dwóch żłobkach i ze wspólną izolacją od korpusu.
Sekcja ma dwie aktywne strony. Lewa strona aktywna nazywana jest początkiem sekcji (zwojem), a prawa strona końcem sekcji. Odległość między aktywnymi bokami przekroju nazywana jest skokiem przekroju. Można to zmierzyć liczbą zębów lub częściami podziałów biegunów.
Skok przekroju nazywany jest średnicowym, jeśli jest równy podziałowi biegunów i obcięty, jeśli jest mniejszy niż podział biegunów, ponieważ skok przekroju nie jest większy niż podział biegunów.
Charakterystyczną wielkością determinującą pracę cewki jest liczba żłobków na biegun i fazę, tj. liczba żłobków zajmowanych przez uzwojenie każdej fazy w obrębie jednego podziału biegunów:

gdzie z jest liczbą żłobków stojana.
Cewka pokazana na rys. 1 lit. a, zawiera następujące dane:

Nawet w przypadku tej najprostszej cewki przestrzenny rysunek drutów i ich połączeń okazuje się skomplikowany, dlatego zwykle zastępuje się go rozwiniętym schematem, w którym druty uzwojenia są przedstawione nie na powierzchni cylindrycznej, ale na płaszczyźnie (cylindrycznej powierzchnia z rowkami i cewka „rozwija się » w płaszczyźnie). na ryc. 2 to szczegółowy schemat rozważanego uzwojenia stojana.
Na poprzednim rysunku dla uproszczenia pokazano, że część fazy A uzwojenia umieszczona w żłobkach 1 i 4 składa się tylko z dwóch drutów, czyli jednego zwoju. W rzeczywistości każda taka część uzwojenia przypadająca na jeden biegun składa się z w zwojów, to znaczy w każdej parze rowków w umieszczonych jest w drutów, połączonych w jedno uzwojenie. Dlatego podczas omijania zgodnie z rozszerzonym schematem, na przykład fazy A szczeliny 1, konieczne jest ominięcie szczelin 1 i 4 w razy przed przejściem do szczeliny 7. Odległość między bokami zwoju jednego uzwojenia lub kroku uzwojenia , y pokazano na ryc. 1, re; zwykle wyrażany liczbą kanałów.
Ryż. 3. Osłona maszyny asynchronicznej
Pokazano na ryc.1 i 2, uzwojenie stojana nazywane jest jednowarstwowe, ponieważ pasuje do każdego rowka w jednej warstwie.Aby umieścić przecinające się przednie części w płaszczyźnie, są one wygięte na różnych powierzchniach (ryc. 2, b). Uzwojenia jednowarstwowe są wykonywane z krokiem równym rozdzieleniu biegunów (ryc. 2, a) lub ten krok jest średnio równy rozdzieleniu biegunów dla różnych uzwojeń tej samej fazy, jeśli y> 1, y< 1... W naszych czasach cewki dwuwarstwowe są bardziej powszechne.
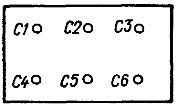
Początek i koniec każdej z trzech faz uzwojenia jest wskazany na panelu maszyny, na którym znajduje się sześć zacisków (rys. 3). Trzy przewody liniowe sieci trójfazowej są podłączone do górnych zacisków C1, C2, SZ (początek faz). Dolne zaciski C4, C5, C6 (końce faz) są albo połączone w jeden punkt dwoma zworami poziomymi, albo każdy z tych zacisków jest podłączony do zworki pionowej z górnym zaciskiem leżącym nad nią.
W pierwszym przypadku trzy fazy stojana tworzą połączenie w gwiazdę, w drugim - połączenie w trójkąt. Jeżeli na przykład jedna faza stojana jest zaprojektowana na napięcie 220 V, to napięcie sieci, do której podłączony jest silnik, musi wynosić 220 V, jeżeli stojan jest połączony w trójkąt; w przypadku połączenia z gwiazdą napięcie sieci powinno wynosić
Gdy stojan jest połączony w gwiazdę, przewód neutralny nie jest zasilany, ponieważ silnik jest symetrycznym obciążeniem sieci.
Wirnik maszyny indukcyjnej jest wykonany z tłoczonych arkuszy izolowanej stali elektrotechnicznej na wale lub na specjalnej konstrukcji nośnej. Luz promieniowy między stojanem a wirnikiem jest jak najmniejszy, aby zapewnić niskie opory na drodze strumienia magnetycznego przenikającego obie części maszyny.
Najmniejsza szczelina dopuszczalna przez wymagania technologiczne wynosi od jednej dziesiątej milimetra do kilku milimetrów, w zależności od mocy i wymiarów maszyny. Przewody uzwojenia wirnika umieszczone są w żłobkach wzdłuż wirnika tworzących się bezpośrednio na jego powierzchni, aby zapewnić jak największy kontakt uzwojenia wirnika z polem wirującym.
Maszyny indukcyjne są produkowane zarówno z wirnikami fazowymi, jak i klatkowymi.

Ryż. 4. Wirnik fazowy
Wirnik fazowy ma zwykle uzwojenie trójfazowe, wykonane na wzór uzwojenia stojana, o tej samej liczbie biegunów. Uzwojenie jest połączone w gwiazdę lub trójkąt; trzy końce cewki są doprowadzone do trzech izolowanych pierścieni ślizgowych, które obracają się wraz z wałem maszyny. Poprzez szczotki zamocowane na nieruchomej części maszyny i ślizgające się po pierścieniach ślizgowych, do wirnika podłączony jest trójfazowy opornik rozruchowy lub regulacyjny, tzn. do każdej fazy wirnika wprowadzany jest opór czynny. Widok zewnętrzny wirnika fazowego pokazano na ryc. 4, na lewym końcu wału widoczne są trzy pierścienie ślizgowe. Silniki asynchroniczne z uzwojonym wirnikiem znajdują zastosowanie tam, gdzie wymagana jest płynna regulacja prędkości obrotowej mechanizmu napędowego, a także przy częstych rozruchach silnika pod obciążeniem.
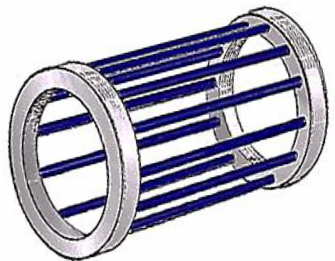
Konstrukcja wirnika klatkowego jest znacznie prostsza niż wirnika fazowego. Dla jednego z projektów na FIG. 5a przedstawia kształt blach, z których montowany jest rdzeń wirnika. W tym przypadku otwory w pobliżu zewnętrznego obwodu każdego arkusza tworzą podłużne kanały w rdzeniu. Do tych kanałów wlewa się aluminium, po jego zestaleniu w wirniku powstają podłużne pręty przewodzące.Na obu końcach wirnika odlewane są jednocześnie aluminiowe pierścienie, które zwierają aluminiowe pręty. Powstały układ przewodzący jest powszechnie nazywany komórką wiewiórki.

Ryż. 5. Rotor komórki wiewiórczej
Wirnik klatkowy pokazano na ryc. 5 B. Na końcach wirnika widoczne są łopatki wentylacyjne odlane jednocześnie z krótkimi pierścieniami sprzęgającymi. W tym przypadku szczeliny są ukośne o jeden podział wzdłuż wirnika. Klatka jest prosta, nie ma styków ślizgowych, dlatego trójfazowe asynchroniczne silniki klatkowe są najtańsze, najprostsze i najbardziej niezawodne; są najczęstsze.