Enkodery — Czujniki kąta obrotu
 Pozycjonowanie w różnego rodzaju urządzeniach przemysłowych odbywa się za pomocą prostych z wyglądu urządzeń — enkoderów (inaczej czujników kątowych).
Pozycjonowanie w różnego rodzaju urządzeniach przemysłowych odbywa się za pomocą prostych z wyglądu urządzeń — enkoderów (inaczej czujników kątowych).
Enkodery służą do konwersji ruchu liniowego lub obrotowego na binarny sygnał cyfrowy. Enkoder to urządzenie, którego wał jest połączony z obracającym się wałem badanego obiektu i zapewnia elektroniczną kontrolę kąta obrotu tego ostatniego. Zgodnie z zasadą działania enkodery dzielą się na optyczne i magnetyczne.
Na wale enkodera optycznego znajduje się dysk z przerywanymi okienkami na obwodzie, na którym znajduje się dioda LED i fototranzystor, które zapewniają formowanie sygnału wyjściowego w postaci prostokątne ciągi impulsów z częstotliwością proporcjonalną zarówno do liczby okienek, jak i prędkości obrotowej tarczy/wału. Liczba impulsów wskazuje kąt obrotu.
Enkodery optyczne są dostępne jako enkodery inkrementalne i absolutne.
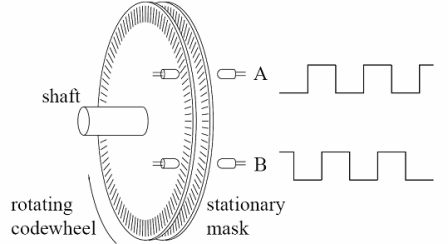
Enkodery inkrementalne mają dysk przerywany z wieloma oknami o tym samym rozmiarze co promień podstawy i dwoma odczytami transoptory, co pozwala ustalić zarówno kąt obrotu, jak i kierunek obrotu wału.Na dodatkowym promieniu dysku znajduje się pojedyncze okno przerwania i odpowiadający mu transoptor określający pozycję startową (home).
Ujemny moment obrotowy - Enkodery inkrementalne zapewniają względny odczyt kąta obrotu, o którym informacja nie jest zapisywana po zatrzymaniu obrotu. Ich zalety to prostota konstrukcji (a co za tym idzie niski koszt) przy wysokiej rozdzielczości i wysokiej częstotliwości pracy.
Enkodery inkrementalne o podwyższonej trwałości ukierunkowane są na zastosowania przemysłowe - w budowie maszyn, walcowniach, przemyśle stoczniowym, tekstylnym, obuwniczym, obróbce drewna. Decydującymi parametrami dla takich enkoderów są rozdzielczość w kącie obrotu, możliwość pracy przy wysokich częstotliwościach, wysoki stopień ochrony pozwalający wytrzymać warunki trudnego środowiska.
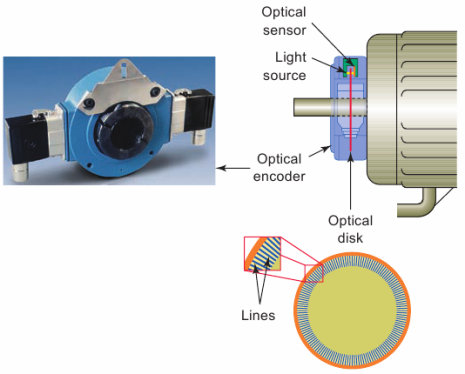
Dysk z liniami lub nacięciami, które przerywają wiązkę światła do czujnika optycznego. Obwód elektroniczny wykrywa przerwanie wiązki i generuje cyfrowe impulsy wyjściowe z enkodera.
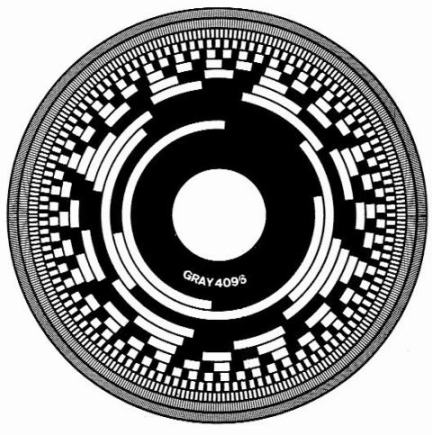
Dysk kodujący — urządzenie do konwersji kątowych przemieszczeń wału na postać cyfrową. Geometryczny obraz kodu cyfrowego jest nakładany na dysk kodujący. Symbole bitów kodu są nanoszone na koncentryczną ścieżkę, a najmniej znaczące (mniej znaczące) bity znajdują się bliżej obrzeża.
W zależności od sposobu odczytywania kodu (kontaktowy, fotoelektryczny, elektromagnetyczny, indukcyjny, elektrostatyczny itp.) obraz geometryczny kodu składa się z kodu przewodzącego i izolowanego elektrycznie, przezroczystego i nieprzezroczystego, magnetycznego i niemagnetycznego itp.
Najbardziej rozpowszechnione było kodowanie dysków odmianami kodu binarnego, które wykluczają występowanie błędów przy przekraczaniu granic poszczególnych dyskretnych sekcji, gdy niektóre bity można odczytać po jednej stronie granicy, a niektóre po drugiej (z powodu niedokładnej instalacji urządzeń wymiennych lub z powodu niejednoczesnego odczytu kodu podczas obracania się dysku. Kody te obejmują tzw. kod Fau (kod Barkera) i kod odruchu (kod Greya).
Niektóre optyczne enkodery obrotowe wykorzystują odblaskowy dysk enkodera. Dysk ten ma naprzemienne sekcje, które pochłaniają lub odbijają światło, a źródło światła wraz z odbiornikiem znajdują się po jednej stronie dysku. Jeśli jest tylko jedno źródło światła i odbiornik, sekwencja impulsów z czujnika pozwala dowiedzieć się, o ile kroków obrócił się dysk względem poprzedniej pozycji.
Czujnik nie może określić kierunku obrotów, ale jeśli dodasz drugą parę źródło-odbiornik, przesuniętą w fazie o 90 względem pierwszej, to mikrokontroler będzie w stanie określić kierunek obrotu dysku na podstawie różnicy faz między pociągi pulsacyjne.
Należy pamiętać, że każdy system, który wykrywa względny obrót dysku, ale nie może zmierzyć jego bezwzględnego położenia kątowego, jest enkoderem inkrementalnym.
Enkoder absolutny ma nieciągły dysk z koncentrycznymi oknami o różnych promieniach, których względne rozmiary są określone przez kod binarny i które są odczytywane jednocześnie, dając zakodowany sygnał wyjściowy dla każdej pozycji kątowej (kod Graya, kod binarny ...).
W takim przypadku możliwe jest uzyskanie danych o chwilowym położeniu wału bez licznika cyfrowego lub powrót do położenia początkowego, ponieważ wyjście ma zakodowane słowo — „n bit”, chronione przed zakłóceniami elektrycznymi.
Enkodery absolutne są stosowane w aplikacjach wymagających przechowywania danych wejściowych przez długi czas, ale są bardziej złożone w konstrukcji i droższe.
Enkodery absolutne z interfejsem fieldbus posiadają interfejs wyjściowy do komunikacji fieldbus zgodnie ze standardami CANopen, ProfiBus, DeviceNet, Ethernet, InterBus i wykorzystują kod binarny do określenia kąta obrotu. Powyższe interfejsy komunikacyjne są programowalne według szeregu parametrów: np. kierunku obrotów, rozdzielczości impulsu na obrót, szybkości transmisji.

Enkodery zamontowane na wale silnika skutecznie zapewniają precyzyjną kontrolę pozycjonowania. Enkodery takie produkowane są zazwyczaj w wersji „otworowej”, a ważnym elementem ich konstrukcji są specjalne sprzęgła, które pozwalają na kompensację luzu wału silnika.
Pozycjonowanie w powyższych warunkach najefektywniej zapewnia enkoder magnetyczny, w którym konwersja przemieszczenia kątowego wału na sygnał elektroniczny odbywa się bezdotykowo w oparciu o efekt Halla, nie jest związana z obracaniem się wewnątrz czopera optycznego czujnika i umożliwia przetwarzanie sygnału z prędkością do 60 000 obr./min.
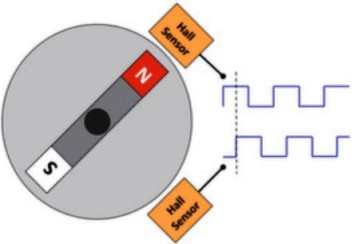
W enkoderze magnetycznym szybki obrót zewnętrznego wału, na którym zamocowany jest stały magnes cylindryczny, jest wykrywany przez czujnik Halla połączony na pojedynczym krysztale półprzewodnikowym ze sterownikiem przetwarzania sygnału.
Gdy bieguny magnesu trwałego obracają się nad mikroukładem z Czujnik Halla zmienny wektor indukcji magnetycznej indukuje napięcie Halla, które zawiera informację o chwilowej wartości kąta obrotu wału. Mikrokontroler zapewnia szybką konwersję napięcia Halla na parametr kąta pozycjonowania.

Możliwość takiej konwersji bez bezpośredniego mechanicznego łączenia magnesu i elementów czujnika Halla to główna zaleta enkoderów magnetycznych, zapewnia im dużą niezawodność i trwałość oraz pozwala wydajnie pracować w aplikacjach o dużych prędkościach związanych z automatyką przemysłową, poligrafią, obróbką metali , pomiary i sprzęt pomiarowy.