Elektroniczne przekaźniki czasowe
 Aby je zastąpić, opracowano zegarki elektroniczne przekaźnik czasowy z opóźnieniem elektromagnetycznym i mechanicznym… Pierwsze elektroniczne przekaźniki czasowe zostały wyprodukowane w oparciu o układy tranzystorowe. Następnie układy scalone zaczęto stosować w przekaźnikach elektronicznych, a później nastąpiło przejście na mikrokontrolery.
Aby je zastąpić, opracowano zegarki elektroniczne przekaźnik czasowy z opóźnieniem elektromagnetycznym i mechanicznym… Pierwsze elektroniczne przekaźniki czasowe zostały wyprodukowane w oparciu o układy tranzystorowe. Następnie układy scalone zaczęto stosować w przekaźnikach elektronicznych, a później nastąpiło przejście na mikrokontrolery.
Ogólnie rzecz biorąc, każdy elektroniczny przekaźnik czasowy jest urządzeniem sterowanym napięciem wejściowym (zasilającym) i przełączającym swoje styki wyjściowe z określonym opóźnieniem czasowym.
Blok synchronizacyjny większości elektronicznych przekaźników czasowych oparty jest na obwodach RC (ryc. 1, a). Zmiana napięcia na kondensatorze obwodu RC podłączonego do źródła napięcia stałego jest opisana wykładniczą funkcją czasu. Pozwala to, poprzez monitorowanie napięcia kondensatora, na tworzenie zadanych przedziałów czasowych, np. od momentu podłączenia obwodu RC do źródła, aż napięcie kondensatora osiągnie określony poziom. Funkcja wykładnicza jest również używana do rozładowywania wstępnie naładowanego kondensatora równoległego obwodu RC.Układy takie stosowane są w przekaźnikach czasowych, które po zaniku napięcia zasilającego muszą przełączać swoje styki.
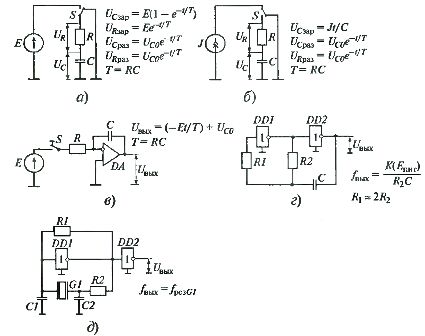
Ryż. 1. Warianty schematów czasowych stosowanych w elektronicznych przekaźnikach czasowych
W niektórych przekaźnikach czasowych ładunek kondensatora obwodu RC jest używany ze stabilnym prądem (ryc. 1, b i c). W tym przypadku napięcie w kondensatorze zmienia się liniowo w czasie, co pozwala uzyskać nieco większą dokładność w tworzeniu opóźnień czasowych. Rolę stabilnego źródła prądu w takich przekaźnikach pełni obwód elektroniczny. Jednak przekaźniki czasowe ze stabilnym źródłem prądu są trudniejsze do wdrożenia i dlatego nie są powszechnie stosowane.
Czas ładowania (rozładowania) obwodu RC w rzeczywistych obwodach nie przekracza kilku sekund. Wynika to z kilku okoliczności. Po pierwsze, rezystancja rezystora czasowego w obwodzie RC musi być ograniczona (w granicach kilku megaomów), aby na ładunek na kondensatorze nie miały wpływu prądy upływowe przez materiał izolacyjny płytki drukowanej i prądy wejściowe obwód kontrolujący napięcie w kondensatorze.
Po drugie, w obwodzie RC konieczne jest stosowanie kondensatorów o minimalnej adsorpcji ładunku. W przeciwnym razie właściwość kondensatora do przywracania napięcia na płytkach po jego krótkotrwałym rozładowaniu doprowadzi do rozkładu w czasie, w którym przekaźnik jest ponownie gotowy do pracy. Niestety produkowane kondensatory o minimalnej adsorpcji ładunku mają stosunkowo małą pojemność (rzędu kilku mikrofaradów).
Przekaźniki o krótkich zwłokach czasowych mogą być realizowane w oparciu o pojedynczy cykl ładowania (rozładowania) obwodu RC.W przypadku konieczności zapewnienia dużych opóźnień czasowych przekaźniki wykonywane są w oparciu o wielokrotne obwody ładowania-rozładowania obwodu RC. W takich wielocyklowych przekaźnikach czasowych obwód RC jest zawarty w obwodzie samooscylującym, który zapewnia okresowe ładowanie-rozładowanie kondensatora... Na przykład obwód samooscylacyjny oparty na obwodzie RC można zaimplementować na bramkach logicznych, jak pokazano na ryc. 1 rok
Ładowanie i rozładowywanie kondensatora C odbywa się przez rezystor R2 z powodu różnych poziomów napięcia na wejściu i wyjściu odwracającego elementu logicznego DD2. Stan elementu logicznego DD2 jest przełączany przez ten sam element logiczny DD1, ale jest on używany jako korpus napięcia progowego (zrealizowana jest okoliczność, że elementy logiczne układu scalonego przechodzą do stanu logicznego zera i odwrotnie, w różnych poziomy napięcia wejściowego). W ten sposób po zasileniu na wyjściu DD2 powstaje sekwencja impulsów o dość stabilnym okresie.Zliczając impulsy wyjściowe od początku obwodu samooscylującego, możliwe jest uzyskanie przekaźnika elektronicznego o dużym zakresie czasu opóźnienia przy stosunkowo małych wartościach stałej czasowej łańcucha rozrządu.
Najwyższą dokładność zapewniają elektroniczne przekaźniki czasowe z obwodami samooscylującymi opartymi na rezonatorach kwarcowych (patrz ryc. 1, e).
Zastosowanie niskonapięciowych i niskoprądowych elementów elektronicznych w elektronicznych przekaźnikach czasowych wymusza zastosowanie w nich interfejsów z zewnętrznymi obwodami wejściowymi i wyjściowymi.
Schematy strukturalne przekaźników czasowych jednorazowych i wielocyklowych pokazano na ryc. 2, odpowiednio aib.Oba układy zawierają identyczne bloki: przetwornik wejściowy, układ ustawiania obwodu czasowego w stan początkowy oraz korpus wykonawczy (wyjściowy).
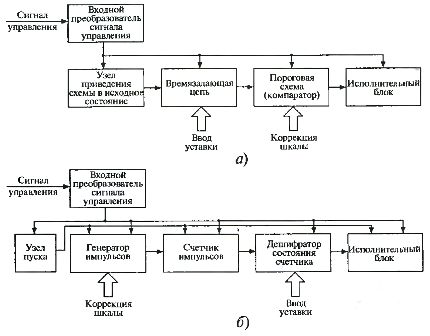
Ryż. 2. Schematy blokowe przekaźników czasowych
Zadaniem przetwornika wejściowego jest wytworzenie niskiego napięcia o znormalizowanym poziomie do zasilania obwodu synchronizującego, a także do wytworzenia potencjałów odniesienia niezbędnych do działania organów progowych.
Węzeł do ustawiania obwodu czasowego w stanie początkowym jest niezbędny do doprowadzenia wszystkich elementów przekaźnikowych biorących udział w tworzeniu opóźnienia czasowego do ściśle określonego stanu początkowego. Inicjalizacji przekaźnika można dokonać albo na końcu poprzedniego cyklu przekaźnika, albo w momencie załączenia przekaźnika.
W przekaźnikach z pojedynczym opóźnieniem czas jest regulowany albo przez zmianę stałej czasowej obwodu synchronizującego, albo przez zmianę progu komparatora (organu progowego), który porównuje napięcie w kondensatorze obwodu synchronizującego z ustawieniem i działa na organ wyjściowy (wykonawczy).
W wielocyklowych przekaźnikach czasowych opóźnienie jest z reguły zapewniane przez zliczanie impulsów generatora zegara w liczniku impulsów i jest korygowane (w celu skompensowania rozrzutu parametrów elementów) poprzez zmianę stałej czasowej RC -łańcuchy generatora zegara. Po przyłożeniu napięcia zasilającego uruchamia się generator zegara i impulsy zaczynają docierać do wejścia licznika.
Rozpoznanie osiągnięcia wymaganego stanu licznika zapewnia układ dekodujący jego stan na podstawie mechanicznych przełączników ustawiających zadaną wartość.W momencie zgromadzenia się w liczniku określonej liczby impulsów, co zbiega się z ustawieniem dekodera, generowany jest sygnał sterujący dla wyjściowej jednostki wykonawczej.
Ryż. 3. Elektroniczny przekaźnik czasowy VL-54
W ostatnich latach wdrożono elektroniczne przekaźniki czasowe oparte na mikrokontrolerach. Mikrokontroler wymaga do działania impulsów zegarowych o wystarczająco stabilnej częstotliwości. Z reguły impulsy te są tworzone przez wbudowany oscylator oparty na rezonatorach kwarcowych (ryc. 1, e). Po odebraniu sygnału startu przekaźnika czasowego mikrokontroler rozpoczyna zliczanie impulsów zegara. W przeciwieństwie do elektronicznych przekaźników czasowych opartych na układach RC, opóźnienia kwarcowych przekaźników czasowych są praktycznie niezależne od temperatury otoczenia i napięcia zasilania przekaźnika.
Istotną zaletą przekaźnika czasowego wykorzystującego mikrokontrolery jest możliwość ich programowania bezpośrednio w montowanym urządzeniu. Elektroniczne przekaźniki czasowe wykorzystujące mikrokontrolery bez oprogramowania nie wymagają konfiguracji i zaczynają działać natychmiast po włączeniu zasilania.
Najpopularniejsze wewnętrzne elektroniczne przekaźniki czasowe: RV-01, RV-03, RP-18, VL-54, VL-56, RVK-100, RP21-M-003
Shumriev V. Ya Półprzewodnikowe przekaźniki czasowe.