Mierniki faz - przeznaczenie, rodzaje, urządzenie i zasada działania
 Elektryczne urządzenie pomiarowe nazywane jest miernikiem fazy, którego funkcją jest pomiar kąta fazowego między dwoma oscylacjami elektrycznymi o stałej częstotliwości. Na przykład za pomocą wskazomierza można zmierzyć kąt fazowy w trójfazowej sieci napięciowej. Mierniki fazy są często używane do określania współczynnika mocy, cosinus phi, dowolnej instalacji elektrycznej. Dlatego mierniki faz są szeroko stosowane w opracowywaniu, uruchamianiu i obsłudze różnych urządzeń i aparatury elektrycznej i elektronicznej.
Elektryczne urządzenie pomiarowe nazywane jest miernikiem fazy, którego funkcją jest pomiar kąta fazowego między dwoma oscylacjami elektrycznymi o stałej częstotliwości. Na przykład za pomocą wskazomierza można zmierzyć kąt fazowy w trójfazowej sieci napięciowej. Mierniki fazy są często używane do określania współczynnika mocy, cosinus phi, dowolnej instalacji elektrycznej. Dlatego mierniki faz są szeroko stosowane w opracowywaniu, uruchamianiu i obsłudze różnych urządzeń i aparatury elektrycznej i elektronicznej.
Gdy fazor jest podłączony do obwodu mierzonego, urządzenie jest podłączone do obwodu napięciowego i do obwodu pomiaru prądu. W trójfazowej sieci zasilającej fazor jest podłączony napięciem do trzech faz, a prądem do uzwojeń wtórnych przekładników prądowych również w trzech fazach.
W zależności od urządzenia miernika fazy możliwy jest również uproszczony schemat jego podłączenia, gdy jest on również podłączony do trzech faz napięciem i prądem - tylko do dwóch faz.Trzecia faza jest następnie obliczana przez dodanie wektorów tylko dwóch prądów (dwóch mierzonych faz). Przeznaczenie miernika fazy — pomiar cosinus fi (współczynnik mocy), więc w języku potocznym są one również nazywane „cosinusomierzami”.
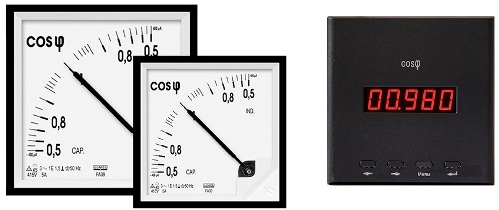
Dziś można znaleźć mierniki fazowe dwóch typów: elektrodynamiczny i cyfrowy. Fazymetry elektrodynamiczne lub elektromagnetyczne oparte są na prostym schemacie z proporcjonalnym mechanizmem pomiaru przesunięcia fazowego. Dwie sztywno połączone ze sobą ramy, których kąt między nimi wynosi 60 stopni, są zamocowane na osiach w podporach i nie występuje przeciwstawny moment mechaniczny.
W pewnych warunkach, które są ustalane przez zmianę przesunięcia fazowego prądów w obwodach tych dwóch ram, a także kąta zamocowania tych ram względem siebie, ruchoma część urządzenia pomiarowego jest obracana o kąt równy do kąta fazowego. Skala liniowa urządzenia pozwala na zapis wyniku pomiaru.
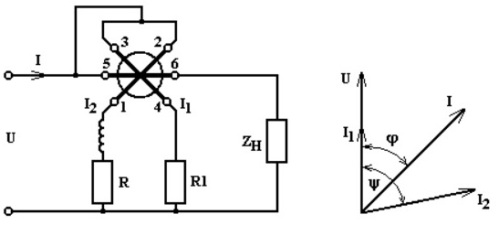
Przyjrzyjmy się zasadzie działania miernika fazy elektrodynamicznej. Ma stałą cewkę prądu I i dwie ruchome cewki. Prądy I1 i I2 płyną przez każdą z ruchomych cewek. Płynące prądy wytwarzają strumienie magnetyczne zarówno w cewce nieruchomej, jak iw cewkach ruchomych. Odpowiednio, oddziałujące na siebie strumienie magnetyczne cewek generują dwa momenty M1 i M2.
Wartości tych momentów zależą od względnego położenia obu cewek, od kąta obrotu ruchomej części urządzenia pomiarowego, a momenty te są skierowane w przeciwnych kierunkach.Średnie wartości momentów zależą od prądów płynących w cewkach ruchomych (I1 i I2), od prądu płynącego w cewce nieruchomej (I), od kątów przesunięcia fazowego prądów cewek ruchomych względem prądu w cewce stacjonarnej (ψ1 i ψ2 ) oraz na uzwojeniach o parametrach projektowych.
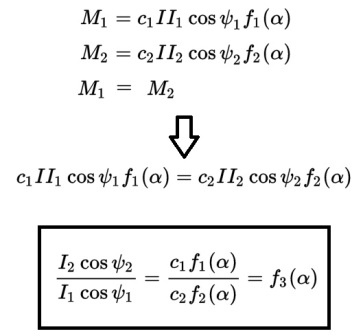
W rezultacie ruchoma część urządzenia obraca się pod działaniem tych momentów, aż do uzyskania równowagi, spowodowanej równością momentów wynikających z obrotu. Skalę miernika fazy można skalibrować pod względem współczynnika mocy.
Wadami fazomierzy elektrodynamicznych jest zależność wskazań od częstotliwości oraz znaczny pobór energii z badanego źródła.
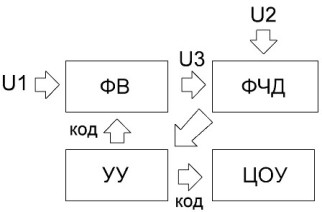
Cyfrowe mierniki fazy można wdrażać na różne sposoby. Na przykład kompensacyjny miernik fazy ma wysoki stopień dokładności, mimo że pracuje w trybie ręcznym.Jednak zastanów się, jak to działa. Istnieją dwa napięcia sinusoidalne U1 i U2, przesunięcie fazowe między którymi musisz znać.
Napięcie U2 jest dostarczane do przesuwnika fazowego (PV), który jest sterowany kodem z jednostki sterującej (UU). Przesunięcie fazowe między U3 i U2 jest stopniowo zmieniane, aż do osiągnięcia stanu, w którym U1 i U3 są w fazie. Dopasowując znak przesunięcia fazowego między U1 a U3, wyznacza się czuły na fazę detektor (PSD).
Sygnał wyjściowy detektora fazoczułego jest podawany do jednostki sterującej (CU). Algorytm równoważenia realizowany jest metodą kodu impulsowego. Po zakończeniu procesu równoważenia kod współczynnika przesunięcia fazowego (PV) będzie wyrażał przesunięcie fazowe między U1 i U2.
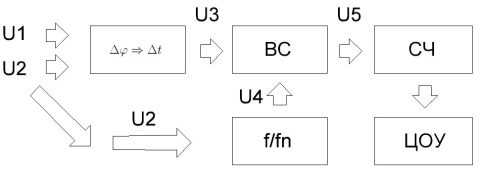
Większość nowoczesnych cyfrowych mierników faz wykorzystuje zasadę dyskretnego zliczania.Ta metoda działa dwuetapowo: przekształca przesunięcie fazowe w sygnał o określonym czasie trwania, a następnie mierzy czas trwania tego impulsu za pomocą liczby dyskretnej. Urządzenie zawiera przetwornik faza-impuls, selektor czasu (VS), dyskretny impuls kształtujący (f/fn), licznik (MF) oraz DSP.
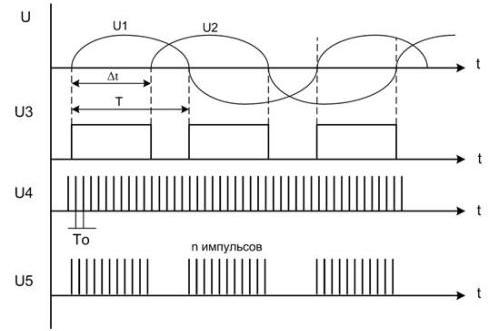
Przetwornik faza-impuls jest utworzony z U1 i U2 z przesunięciem fazowym Δφ prostokątne impulsy U3 jako sekwencja. Te impulsy U3 mają częstotliwość powtarzania i cykl pracy odpowiadający częstotliwości i przesunięciu czasowemu sygnałów wejściowych U1 i U2. Impulsy U4 i U3 tworzą dyskretne impulsy zwrotne o okresie T0, które są przykładane do selektora czasu. Selektor czasu z kolei otwiera się na czas trwania impulsu U3 i cyklicznie przechodzi przez impulsy U4. W wyniku wyjścia selektora czasu uzyskuje się impulsy impulsów U5, których okres powtarzania wynosi T.
Licznik (MF) zlicza liczbę impulsów w pakiecie szeregowym U5, w wyniku czego liczba impulsów odebranych na liczniku (MF) jest proporcjonalna do przesunięcia fazowego między U1 i U2. Kod z licznika przesyłany jest do centralnego centrum sterowania, a odczyty urządzenia wyświetlane są w stopniach z dokładnością do dziesiątych części, co osiąga się dzięki stopniowi dyskrecji urządzenia. Błąd dyskretności związany jest z możliwością pomiaru Δt z dokładnością do jednego okresu zliczania impulsów.
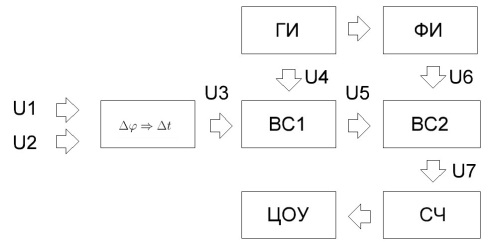
Cyfrowe elektroniczne mierniki faz z uśrednianiem cosinus phi mogą zmniejszyć błąd poprzez uśrednienie w kilku okresach T sygnału testowego.Budowa cyfrowego miernika średniej fazy różni się od licznika obwodów dyskretnych obecnością jeszcze jednego selektora czasu (BC2), a także generatora impulsów (GP) i generatora impulsów dyskretnych (PI).
Tutaj konwerter przesunięcia fazowego U5 zawiera generator impulsów (PI) i selektor czasu (BC1). Przez skalibrowany okres czasu Tk, znacznie większy niż T, do urządzenia podaje się kilka pakietów, na wyjściu których powstaje kilka pakietów, jest to konieczne do uśrednienia wyników.
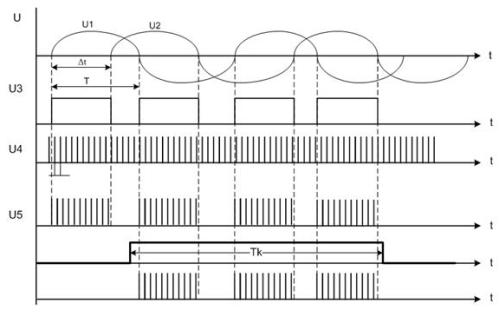
Impulsy U6 mają czas trwania będący wielokrotnością T0, ponieważ układ kształtowania impulsów (PI) działa na zasadzie dzielenia częstotliwości przez zadany współczynnik. Impulsy sygnału U6 otwierają selektor czasu (BC2). W rezultacie na jego wejście dociera kilka pakietów. Sygnał U7 podawany jest do licznika (MF), który jest podłączony do centralnego centrum sterowania. Rozdzielczość urządzenia określa zestaw U6.
Na błąd fazomierza wpływa również słaba dokładność ustalania przesunięcia fazowego przez przetwornik w przedziale czasowym momentów przejścia sygnałów U2 i U1 przez zera. Ale te niedokładności są redukowane przy uśrednianiu wyniku obliczeń dla okresu Tk, który jest znacznie większy niż okres badanych sygnałów wejściowych.
Mamy nadzieję, że ten artykuł pomógł ci uzyskać ogólne zrozumienie działania mierników fazy. Zawsze możesz znaleźć bardziej szczegółowe informacje w specjalnej literaturze, której na szczęście jest dziś dużo w Internecie.