Elektryczny napęd wózka z suwnicami
Wózek z suwnicą jest samodzielnym elementem urządzenia dźwignicowego i przeznaczony jest do przemieszczania ładunków w zasięgu działania suwnicy z technologicznie określoną prędkością ruchu i niezbędną dokładnością pozycjonowania ładunku. Napęd wózka jest jednym z głównych elementów wyposażenia suwnicy.
Wózek porusza się po torze suwnicy. Sam most porusza się w kierunku prostopadłym do kierunku ruchu wózka. Na wózku zainstalowany jest mechanizm podnoszący, który jest wyposażony w hak (lub elektromagnes), za pomocą którego można przesuwać ładunek. Ruch wózka jest integralną częścią cyklu technologicznego suwnicy (rys. 1).
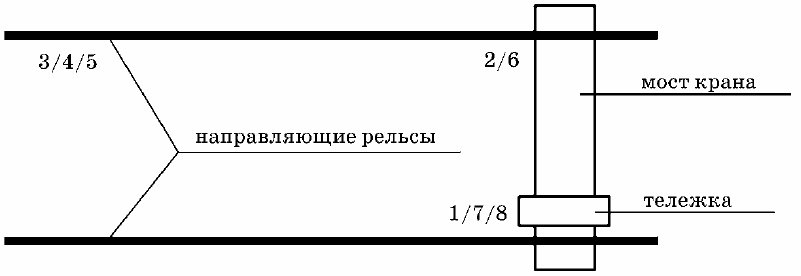
Ryż. 1. Schemat wykonywania operacji suwnicą mostową w cyklu roboczym
Cykl ten składa się z następujących operacji (na rysunku 1 numery operacji przedstawiono w liczbach):
1 — podnoszenie ładunku;
2 — przemieszczenie wózka na zadaną pozycję;
3 — przemieszczenie dźwigu do ustalonej pozycji;
4 — zmniejszenie ciężaru ładunku;
5 — podnoszenie haka z ciężarem ładunku;
6 — przesunięcie żurawia do pierwotnego położenia;
7 — przesunięcie wózka do pierwotnej pozycji;
8 — opuszczanie haka.
Jak widać z cyklu procesowego suwnicy, w drugiej i siódmej operacji załączany jest silnik napędowy wózka. Gdy wózek zbliża się do określonej pozycji w odległości suwnicy, silnik elektryczny napędu wózka jest hamowany elektrycznie w celu zapewnienia wymaganej dokładności hamowania.
Następnie silnik jest wyłączany i uruchamiany jest hamulec mechaniczny. Dodatkowo włączany jest elektryczny napęd ruchu mostu i ładunek przemieszcza się po warsztacie zgodnie z zadaniem technologicznym. Po dotarciu na wyznaczone miejsce żuraw zatrzymuje się, ładunek zostaje opuszczony, a następnie przeprowadzane są niezbędne operacje technologiczne.

Schemat kinematyczny mechanizmu ruchu wózka z suwnicami przedstawiono na rysunku 2. Mechanizm ruchu wózka wykonany jest według schematu z przekładnią pośrodku między kołami napędowymi.
Napęd z silnika elektrycznego D poprzez tarczę hamulcową T, przekładnię P, sprzęgła M i wały B przekazywany jest na koła jezdne. Koło pasowe hamulca służy do unieruchomienia wózka.
Wózek posiada cztery koła jezdne i dwa koła napędowe. Koła jezdne wózków dźwigowych są zwykle wykonane z dwoma żebrami.
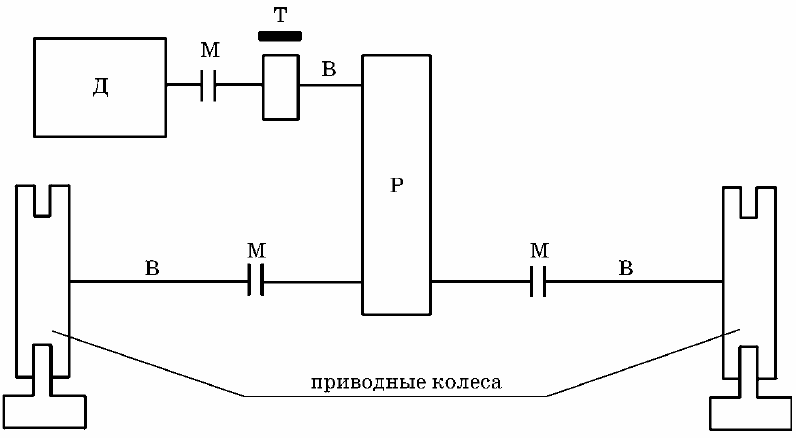
Ryż. 2. Schemat kinematyczny mechanizmu ruchu wózka
Czas przemieszczenia wózka do określonej pozycji zostanie określony z uwzględnieniem czasu rozpędzania i zwalniania wózka z wymaganym przyspieszeniem.W zależności od warunków procesu technologicznego tachogram podczas ruchu wózka powinien mieć postać pokazaną na rysunku 3.
Należy zapewnić płynny start mechanizmu wózka do zadanej prędkości z wymaganym przyspieszeniem. Dla zapewnienia wymaganej dokładności pozycjonowania wymagane jest płynne wyhamowanie napędu elektrycznego z przejściem do prędkości zredukowanej, po czym wózek się zatrzymuje.
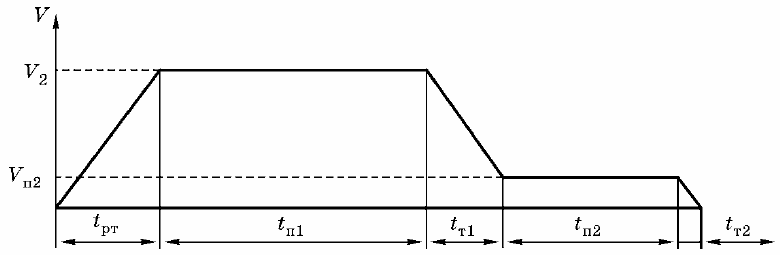
Ryż. 3. Tachogram mechanizmu ruchu wózka
Ruch wózka z uderzeniami w konstrukcję metalową w złączach szynowych, intensywne przyspieszanie i hamowanie, drgania własne konstrukcji metalowej podczas obciążenia maszyn powodują bardzo intensywne oddziaływania mechaniczne na urządzenia elektryczne znajdujące się na wózku suwnicy mostowej. Na tej podstawie napęd elektryczny do poruszania wózkiem musi spełniać następujące wymagania:
1) napęd elektryczny musi zapewniać możliwość uruchomienia mechanizmu w ruchu, odwrócenia kierunku ruchu i zatrzymania mechanizmu z wymaganym przyspieszeniem (m/s2) i prawidłową dokładnością pozycjonowania (mm);
2) napęd elektryczny musi zapewniać płynną regulację prędkości w dół od głównego;
3) opracowany moment obrotowy silnika musi zapewniać działanie mechanizmu przy zadanym natężeniu;
4) przy określonej liczbie uruchomień silnika na godzinę nie powinno dojść do przegrzania jego uzwojeń, dzięki czemu możliwe jest przedłużone zatrzymanie mechanizmu;
5) silnik musi być dobrany zgodnie z warunkami pracy, to jest musi mieć odpowiednią konstrukcję, a jego uzwojenia muszą być żaroodporne i posiadać izolację przed wilgocią;
6) silnik napędowy musi mieć jak najmniejsze masy zamachowe, które mają znaczący wpływ na przebieg stanów nieustalonych podczas częstych rozruchów napędu;
7) silnik napędowy musi odpowiadać mocy mechanizmu jezdnego i posiadać niezbędną przeciążalność;
8) napęd elektryczny musi zapewniać powstawanie procesów przejściowych o minimalnym czasie trwania;
9) przy projektowaniu napędu elektrycznego należy uwzględnić bezpieczeństwo i łatwość obsługi.

Moment statyczny dla mechanizmów ruchu poruszających się po torze poziomym w obiekcie produkcyjnym jest tworzony przez siły tarcia ślizgowego w łożyskach oraz tarcie toczne kół wózka toczącego się po szynach suwnicy. Moment statyczny mechanizmu podczas ruchu wózka do przodu jest określony przez udźwig żurawia. Moment statyczny mechanizmu podczas ruchu wstecznego wózka obliczany jest dla ładunku niepełnego.
Do napędu elektrycznego wózka suwnic, asynchroniczne silniki wirnikowe klatkowe (m.in. jako część przemiennika częstotliwości), silniki indukcyjne z uzwojonym wirnikiem i niezależnie wzbudzane silniki prądu stałego.