Właściwości regulacyjne silników elektrycznych
 Regulowanie dowolnej wartości procesu fizycznego (dowolnego parametru) oznacza utrzymywanie danej wartości na określonym poziomie lub zmianę jej zgodnie z określonym prawem.
Regulowanie dowolnej wartości procesu fizycznego (dowolnego parametru) oznacza utrzymywanie danej wartości na określonym poziomie lub zmianę jej zgodnie z określonym prawem.
Poszczególne siłowniki lub mechanizmy produkcyjne wymagają do normalnej pracy różnych prędkości obrotowych silników siłowników.
Na przykład każda sekcja maszyny papierniczej musi obracać się ze ściśle stałą prędkością niezależnie od zmian obciążenia, a napęd musi być w stanie utrzymać tę prędkość i płynnie zmieniać prędkość każdej sekcji z osobna i całej maszyny papierniczej jako całości.
Prędkości silników elektrycznych są regulowane na różne sposoby. Jest to niezbędne do prawidłowego doboru silnika napędowego do napędu. Napędy różnią się zależnością wartości mocy i momentu na wale od wielkości prędkości obrotowej.
Niektóre mechanizmy utrzymują stałą wartość momentu obrotowego przy zmianie prędkości. Należą do nich np. maszyny do cięcia metalu… W tym przypadku moc zmienia się proporcjonalnie do prędkości obrotowej (graficznie jest to zobrazowane linią prostą na rys. 1).
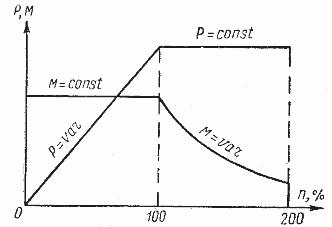
Ryż. 1. Krzywe sterowania prędkością przy stałej mocy i stałym momencie obrotowym
Inne mechanizmy wymagają stałej mocy P przy zmianie prędkości (np mechanizmy podnoszenia i transportu). W tym przypadku wielkość momentu zmienia się zgodnie z prawem hiperboli.
Możesz budować wykresy za pomocą wzoru P = Мω10-3kWh,
gdzie: M to moment wału, N x m, ω = (2πn) / 60 — prędkość kątowa.
na ryc. 1 pokazuje połączone krzywe, gdzie gdy prędkość zmienia się od zera do wartości znamionowej, moment obrotowy pozostaje stały. W tym przypadku moc rośnie wzdłuż linii prostej przechodzącej przez początek. Następnie, wraz z dalszym wzrostem prędkości, moc pozostaje stała, a moment maleje zgodnie z prawem hiperboli.
Przeczytaj także: Charakterystyki mechaniczne silników elektrycznych i mechanizmów ich wytwarzania