Bezkontaktowe czujniki położenia mechanizmów
 W tym artykule porozmawiamy o czujnikach położenia mechanizmów. Zasadniczo główną funkcją każdego czujnika jest dawanie sygnału, gdy wystąpi określone zdarzenie. Oznacza to, że gdy wystąpi zdarzenie wyzwalające, czujnik jest aktywowany i generuje sygnał, który może być analogowy lub dyskretny, cyfrowy.
W tym artykule porozmawiamy o czujnikach położenia mechanizmów. Zasadniczo główną funkcją każdego czujnika jest dawanie sygnału, gdy wystąpi określone zdarzenie. Oznacza to, że gdy wystąpi zdarzenie wyzwalające, czujnik jest aktywowany i generuje sygnał, który może być analogowy lub dyskretny, cyfrowy.
Czujniki krańcowe są stosowane jako czujniki położenia od wielu dziesięcioleci. przełączniki. Składają się ze styków elektrycznych, które mechanicznie otwierają się lub zamykają, gdy jakaś zmienna (pozycja) osiągnie określoną wartość. Wyłączniki krańcowe różnego typu są ważną częścią wielu układów sterowania, których niezawodność zależy od nich. takie czujniki zawierają ruchome elementy mechaniczne, których zasoby są ograniczone.
Wyłączniki krańcowe są obecnie aktywnie zastępowane różnymi czujnikami zbliżeniowymi. Najczęściej czujniki zbliżeniowe typu: indukcyjne, generatorowe, magnetoherkon i fotoelektroniczne. Czujniki te nie mają kontaktu mechanicznego z poruszającym się obiektem, którego położenie jest monitorowane.
Bezkontaktowe czujniki położenia zapewniają dużą szybkość i wysoką częstotliwość załączania mechanizmu. Pewną wadą tych czujników jest zależność ich dokładności od zmian napięcia zasilania i temperatury. W zależności od wymagań urządzenie wyjściowe tych urządzeń może być następujące bezkontaktowy element logicznyI przekaźnik elektryczny.
W precyzyjnych schematach hamowania napędów elektrycznych czujniki zbliżeniowe mogą służyć zarówno do wydawania komendy zmiany biegu na niższy, jak i zatrzymania końcowego.
Obecnie na rynku dostępnych jest wiele rodzajów czujników, ale w ramach tego artykułu skupimy się na bezpośrednio indukcyjnych czujnikach położenia, ponieważ w ponad 80% przypadków czujniki indukcyjne służą jako czujniki położenia mechanizmów.
Czujnik indukcyjny jest wyzwalany, gdy metal zbliża się do strefy wyzwalania. Z tego powodu indukcyjne czujniki położenia nazywane są również czujnikami obecności, czujnikami zbliżeniowymi lub po prostu przełącznikami indukcyjnymi.
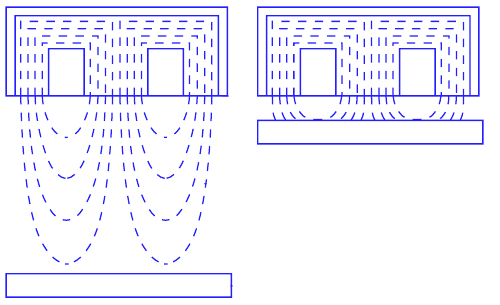
Rozważmy teraz zasadę działania czujnika indukcyjnego. Jak wspomniano powyżej, gdy metal znajduje się wystarczająco blisko strefy wyzwalania, czujnik jest aktywowany. Zjawisko to polega na interakcji zaangażowanych cewki indukcyjne przy zbliżaniu się do niego metalu, który gwałtownie zmienia wielkość pola magnetycznego cewki, co prowadzi do aktywacji czujnika, jest wyzwalany, na jego wyjściu pojawia się odpowiedni sygnał.
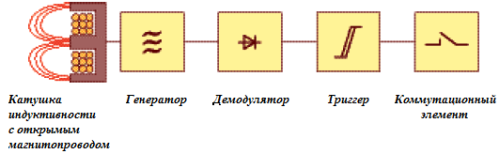
Część elektroniczna urządzenia zawiera obwód sterujący, który z kolei steruje przekaźnikiem lub przełącznikiem tranzystorowym. Składa się z następujących części:
-
Generator, który wytwarza pole elektromagnetyczne potrzebne do interakcji z obiektem.
-
Przerzutnik Schmitta zapewniający histerezę przełączania.
-
Wzmacniacz zwiększający amplitudę sygnału tak, aby osiągnął wymaganą wartość zadziałania.
-
Wskaźnik LED informujący o stanie przełącznika. Zapewnia również monitorowanie wydajności i konfigurację.
-
Środek chroniący przed wnikaniem cząstek stałych i wody.
-
Obudowa do montażu czujnika i ochrony przed różnymi wpływami mechanicznymi Wykonana jest z mosiądzu lub poliamidu i zakończona mocowaniami.
Indukcyjne czujniki położenia znajdują szerokie zastosowanie w układach automatyki przemysłowej, gdzie konieczne jest okresowe lub ciągłe określanie położenia dowolnej części mechanizmu. Czujnik generuje sygnał, który jest wysyłany do napędu. Rozrusznik, sterownik, przekaźnik, przetwornica częstotliwości itp. mogą pełnić funkcję mechanizmu wykonawczego. Najważniejsze, aby parametry czujnika odpowiadały parametrom napędu pod względem napięcia i prądu.
Większość czujników nie jest urządzeniami zasilającymi, są to przede wszystkim urządzenia sygnalizacyjne, dlatego sam czujnik z reguły nie przełącza niczego potężnego, a jedynie steruje, daje sygnał sterujący, działa jako urządzenie inicjujące akcję, które można już podłączyć do przełączania zasilania.
Nowoczesne indukcyjne czujniki położenia najczęściej spotyka się w dwóch wersjach obudów plastikowych lub metalowych: prostokątnej lub cylindrycznej. Średnica czujnika o przekroju kołowym może wynosić od 4 do 30 mm, ale najczęściej stosowane są średnice 18 i 12 mm.
Gdy czujnik jest montowany na sprzęcie, pomiędzy płytką metalową a strefą zadziałania czujnika ustawiana jest szczelina, zwykle odległość ta nie przekracza średnicy czujnika i z reguły okazuje się być 2-3 razy mniejsza niż jego średnica.
Zgodnie ze sposobem podłączenia, indukcyjne czujniki położenia mogą być dwuprzewodowe, trójprzewodowe, czteroprzewodowe i pięcioprzewodowe.
Dwuprzewodowy bezpośrednio przełącza obciążenie, takie jak cewka rozrusznika, czyli działają jak konwencjonalny przełącznik. Czujniki dwuprzewodowe wymagają odporności na obciążenie, więc nie zawsze nadają się jako niezawodne narzędzie, ale nie tracą na znaczeniu.
Obciążenie jest po prostu połączone szeregowo z czujnikiem, jeśli używane jest stałe napięcie, ważne jest przestrzeganie biegunowości, jeśli zmienna polaryzacja nie jest ważna, najważniejsze jest przełączana moc i prąd.
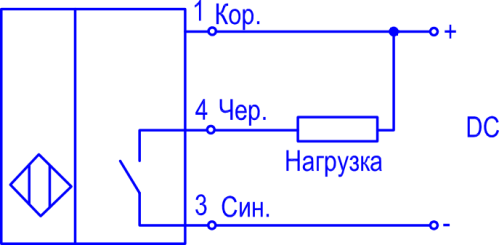
Czujniki trójprzewodowe mają trzeci przewód do zasilania samego czujnika i jest to najpopularniejsze rozwiązanie. Czujniki czteroprzewodowe i pięcioprzewodowe posiadają wyjścia tranzystorowe lub przekaźnikowe do podłączenia obciążenia, a piąty przewód umożliwia wybór trybu pracy czujnika, stanu początkowego wyjść.
Ponieważ wyjścia mogą być zarówno przekaźnikowe, jak i tranzystorowe, czujniki są odpowiednio podzielone na trzy typy w zależności od urządzenia wyjść: przekaźnikowe, npn i pnp.
Czujniki z wyjściem przekaźnikowym
Czujnik z wyjściem przekaźnikowym posiada galwaniczną izolację obwodu zasilającego od obwodu dołączonego. Przełącza jeden przewód, a napięcie w przełączanym obwodzie nie jest szczególnie krytyczne. Ponieważ obwód zasilania czujnika jest izolowany galwanicznie, można to uznać za zaletę czujnika przekaźnikowego. Czujniki tego typu są zwykle duże.
Czujniki z wyjściem tranzystorowym pnp
Czujnik posiada na wyjściu tranzystor pnp, który komutuje przewód dodatni z obciążeniem. Obciążenie jest podłączone do obwodu kolektora wyjściowego tranzystora pnp, który jest podłączony na stałe do ujemnego drugiego przewodu.
Czujniki z wyjściem tranzystorowym npn
Czujnik posiada na wyjściu tranzystor NPN, który komutuje przewód ujemny z obciążeniem. Obciążenie jest podłączone do obwodu kolektora wyjściowego tranzystora npn, który jest połączony na stałe swoim drugim przewodem z przewodem dodatnim.
W zależności od stanu wyjściowego wyjść, indukcyjne czujniki położenia mogą być stykami normalnie zwartymi lub normalnie otwartymi. Stan początkowy oznacza, że stan ten jest w momencie, gdy czujnik nie jest jeszcze wyzwolony, czyli nie jest aktywowany.
Jeśli styki wyjściowe są normalnie zwarte, to obciążenie jest podłączone w czasie bezczynności, jeśli jest normalnie otwarte, to do czasu wyzwolenia czujnika obciążenie zostanie odcięte i nie będzie dostarczane zasilanie do napędu (np. stycznik). Styki normalnie zamknięte są oznaczone w formacie angielskim — N.C. (Normalnie zamknięty), Normalnie otwarty — N.O. (Normalnie otwarte).
Tak więc czujniki z wyjściami tranzystorowymi dzielą się na cztery typy: dwa typy w zależności od przewodności (pnp lub npn) i dwa typy w zależności od stanu początkowego wyjść. Może również wystąpić opóźnienie podczas włączania lub wyłączania.

W zależności od rodzaju napędu, który jest podłączony do czujnika, a także sposobu zasilania, logika czujnika może być dodatnia lub ujemna. Wynika to z poziomu napięcia, który aktywuje wejście urządzenia.
Jeżeli wejście jest załączone, gdy przewód ujemny siłownika jest podłączony do masy, do minusa, wówczas logikę nazywamy ujemną, takie połączenie jest charakterystyczne dla czujników z wyjściami tranzystorowymi typu npn.
Logika dodatnia odpowiada podłączeniu przewodu dodatniego napędu do dodatniego zasilania po aktywacji, logika ta jest typowa dla czujników z wyjściami tranzystorowymi pnp. Najczęściej występuje logika dodatnia w działaniu czujników indukcyjnych położenia mechanizmów.
Starsze najczęściej stosowane typy indukcyjnych czujników położenia
Indukcyjne czujniki położenia IKV-22
Czujniki indukcyjne IKV-22. Działanie tych czujników opiera się na zasadzie zmiany rezystancji indukcyjnej cewek ze stalowym rdzeniem, gdy zmienia się szczelina powietrzna w obwodzie magnetycznym.
Obwód magnetyczny z dwiema cewkami zamontowany jest na stalowej płycie, zamkniętej plastikową osłoną. Do płytki od spodu przymocowane są dwa kondensatory MBGP (jeden o pojemności 15 μF, 200 V, drugi o pojemności 10 μF, 400 V). Kondensatory są osłonięte pokrywą. Kabel jest podłączony przez uszczelkę. Na mechanizmie zainstalowany jest bocznik magnetyczny, którego wymiary muszą wynosić co najmniej: grubość 2 mm, szerokość 80 mm, długość 140 mm. Szczelina powietrzna między obwodem magnetycznym a bocznikiem wynosi 6 ± 4 mm.
Przekaźnik wyjściowy jest zwykle włączany i wyłączany w momencie przejścia bocznika magnetycznego przez czujnik, gdy na skutek zmiany rezystancji indukcyjnej cewki następuje rezonans prądowy i prąd płynący przez cewkę przekaźnika spada. Przekaźniki te: typu MKU-48, 12 V AC, pobierają prąd nie większy niż 0,45 A, prąd opadania nie mniejszy niż 0,1 A.Napięcie zasilania obwodu czujnika to przekaźnik 24 V AC.
Indukcyjne czujniki położenia ID-5
W zakładach hutniczych stosowane są czujniki indukcyjne typu ID-5, przeznaczone do pracy w temperaturach otoczenia do +80°C i wilgotności do 100%. Przewodzący kurz i kamień są dopuszczalne. W czujniku zastosowano półprzewodnikowy wzmacniacz wyjściowy typu UID-10. Moc wyjściowa wzmacniacza (25 W) wystarcza do załączenia szeroko rozpowszechnionych przekaźników REV-800, styczników KP21, MK-1 itp.
Szczelina powietrzna pomiędzy czujnikiem a obserwowanym obiektem ferromagnetycznym może wynosić do 30 mm. Wymiary czujnika ID-5 to 187x170x70 mm, napięcie zasilania 220 V ± 15%, 50 Hz.
Niewielkich rozmiarów przełączniki bezdotykowe BSP
Niewielkie łączniki ruchu BSP-2 (z wyjściem bezstykowym do elementu logicznego) i BRP (z wyjściem do przekaźnika PE-21, 24 V, 16 Ohm) stosowane są na maszynach do obróbki skrawaniem metali.
Przełącznik BSP-2 składa się z czujnika transformatora różnicowego i wyzwalacza półprzewodnikowego. Układ magnetyczny pierwszej cewki czujnika jest poruszany przez stalową płytkę, a druga cewka jest poruszana, gdy porusza się po swoim układzie magnetycznym połączonym z mechanizmem płaskiego twornika. Cewki są włączane w przeciwnym kierunku.
Jeśli twornik znajduje się nad czujnikiem, reaktancje indukcyjne cewek są równe, a wyjście czujnika transformatora różnicowego jest równe zeru. W takim przypadku na wyjściu wyzwalacza pojawia się napięcie co najmniej 2,5 V, co jest wystarczające do działania elementu logicznego.
W przypadku braku twornika nad czujnikiem, do wyzwalacza przykładane jest napięcie, które przywraca go do pierwotnego stanu. Wtedy sygnał wyjściowy przełącznika wynosi zero.
Zasada działania przełącznika BRP jest pod wieloma względami podobna do BSP-2.Wewnątrz skrzynki zainstalowany jest czujnik indukcyjny (zgodnie z obwodem transformatora różnicowego), wyzwalacz i wzmacniacz. Cewki wtórne o różnej liczbie zwojów są włączane w przeciwnym kierunku. Gdy twornik nachodzi na układ magnetyczny czujnika, sygnał maleje i po zmianie fazy następuje przełączenie wyzwalacza i aktywacja zewnętrznego przekaźnika wyjściowego (PE-21, 24 V, 16 Ohm).
Kotwica mocowana do mechanizmu ma wymiary 80x15x3 mm. Odstęp między kotwą a czujnikiem wynosi 4 mm. Dokładność przełączników w trybie nominalnym wynosi ± 0,5 mm, różnica zadziałania nie przekracza 5 mm. Na. wahania napięcia zasilania i temperatury, błąd przełączników BSP-2 i BRP może osiągnąć ± (2,5-f-3,0) mm.
Czujniki indukcyjne wysokiej częstotliwości VKB
Precyzyjne czujniki indukcyjne typu VKB ze zworą w kształcie litery U lub płaską stosuje się również do automatyzacji maszyn do obróbki skrawaniem metali. Bieguny wbudowanego transformatora tworzą otwarty układ elektromagnetyczny. Robocza szczelina powietrzna wynosi 0,1-0,15 mm.
Napięcie wyjściowe z uzwojenia wtórnego transformatora podawane jest do różnicowego obwodu pomiarowego, a następnie do wzmacniacza tranzystorowego. Całkowity błąd czujnika przy wahaniach temperatury od 5 do 40°C i napięciu od 85 do 110% wartości nominalnej wynosi ± (0,064-0,15) mm, różnica w odpowiedzi nie przekracza 0,4 mm. Maksymalna prędkość ruchu mechanizmu wynosi 10 m/mm. Wymiary czujnika 62x34x24 mm. Napięcie zasilania 12 V.
Specjalne typy precyzyjnych czujników indukcyjnych do maszyn do cięcia metalu z obwodem różnicowym mają błąd mniejszy niż ± 0,01 mm.Takie czujniki obejmują bezkontaktowy przełącznik ruchu typu VPB12, składający się z jednostki czujnikowej na jednostce elektronicznej. Zespół czujnika zawiera indukcyjny czujnik pracy, indukcyjny czujnik kompensacji oraz płytki drukowane. Mechanizm jest zamontowany: kontrolny element ferrytowy. Napięcie zasilania 12 V prądu stałego. Maksymalna odległość ekspozycji wynosi nie więcej niż 0,12 mm. Do wyjścia czujnika można podłączyć przekaźnik typu RPU-0. Maksymalny prąd obciążenia urządzenia wyjściowego wynosi 0,16 A.
Czujniki położenia generatora
Czujniki tego typu są kompaktowe i bardzo dokładne. Generatory czujników serii KVD-6M i KVD-25 (z gniazdami), KVP-8 i KVP-16 (samoloty) sprawdziły się dobrze. Nadają się do stosowania w miejscach o dużym stężeniu wilgoci i pyłu. Elementy obwodu tranzystorowego czujnika (generator i wyzwalacz) umieszczono w obudowie wykonanej z wstrząsoodpornego polistyrenu. Uszczelnianie odbywa się za pomocą masy utwardzanej na zimno. Zakres temperatur pracy wynosi od — 30 do +50 ° C.
Czujnik HPC generuje dyskretny sygnał, gdy metalowa płytka („flaga”) przechodzi przez szczelinę, powodując awarię w generowaniu i przełączaniu wyzwalacza. Szerokość szczeliny wynosi 6 mm dla czujnika KVD-6M i 25 mm dla czujnika KVD-25.
Czujniki KVP-8 i KVP-16 uaktywniają się, gdy przechodzi obok nich metalowa płytka w maksymalnej odległości odpowiednio 8 i 16 mm.