Automatyczna kontrola temperatury w piekarnikach elektrycznych
 W elektrycznych piecach oporowych w większości przypadków stosowany jest najprostszy rodzaj regulacji temperatury – regulacja dwupołożeniowa, w której element wykonawczy układu regulacji – stycznik ma tylko dwie pozycje krańcowe: „włączona” i „wyłączona”. .
W elektrycznych piecach oporowych w większości przypadków stosowany jest najprostszy rodzaj regulacji temperatury – regulacja dwupołożeniowa, w której element wykonawczy układu regulacji – stycznik ma tylko dwie pozycje krańcowe: „włączona” i „wyłączona”. .
W stanie włączonym temperatura pieca wzrasta, ponieważ jego moc jest zawsze dobierana z marginesem, a odpowiednia temperatura w stanie ustalonym znacznie przekracza jego temperaturę roboczą. Po wyłączeniu temperatura piekarnika spada wykładniczo.
Dla wyidealizowanego przypadku, w którym w układzie regulator-piec nie występuje opóźnienie dynamiczne, działanie regulatora załącz-wyłącz pokazano na rys. 1, w którym w górnej części podano zależność temperatury pieca od czasu, aw dolnej odpowiadającą jej zmianę jego mocy.
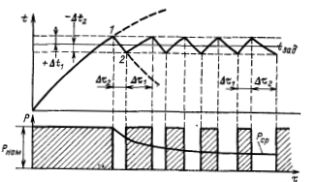
Ryż. 1. Wyidealizowany schemat działania dwupołożeniowego regulatora temperatury
Gdy piec się nagrzeje, na początku jego moc będzie stała i równa nominalnej, więc jego temperatura wzrośnie do punktu 1, gdy osiągnie wartość Tbutt + ∆t1. W tym momencie regulator zadziała, stycznik wyłączy piec, a jego moc spadnie do zera. W rezultacie temperatura pieca zacznie spadać wzdłuż krzywej 1-2, aż do osiągnięcia dolnej granicy martwej strefy. W tym momencie piec włączy się ponownie, a jego temperatura ponownie zacznie rosnąć.
Zatem proces regulacji temperatury pieca na zasadzie dwóch pozycji polega na jej zmianie po krzywej piły wokół wartości zadanej w przedziałach +∆t1, -∆t1 określonych przez martwą strefę regulatora.
Średnia moc pieca zależy od stosunku przedziałów czasowych jego stanu włączenia i wyłączenia. Gdy piec nagrzewa się i ładuje, krzywa nagrzewania pieca staje się bardziej stroma, a krzywa chłodzenia pieca bardziej płaska, więc stosunek okresów cyklu zmniejszy się, a zatem średnia moc Pav również spadnie.
Dzięki regulacji dwupozycyjnej średnia moc piekarnika jest zawsze dostosowywana do mocy wymaganej do utrzymania stałej temperatury. Martwa strefa nowoczesnych termostatów może być bardzo mała i doprowadzona do 0,1-0,2 ° C. Jednak rzeczywiste wahania temperatury pieca mogą być wielokrotnie większe ze względu na dynamiczne opóźnienie w układzie regulator-piec.
Głównym źródłem tego opóźnienia jest bezwładność czujnika termopary, zwłaszcza jeśli jest on wyposażony w dwie powłoki ochronne, ceramiczną i metalową.Im większe to opóźnienie, tym bardziej wahania temperatury grzałki przekraczają strefę nieczułości sterownika. Ponadto amplitudy tych oscylacji są silnie zależne od nadmiaru mocy pieca. Im bardziej moc przełączania pieca przekracza moc średnią, tym większe są te wahania.
Czułość nowoczesnych potencjometrów automatycznych jest bardzo wysoka i może sprostać wszelkim wymaganiom. Wręcz przeciwnie, bezwładność czujnika jest duża. Tak więc standardowa termopara w porcelanowej końcówce z osłoną ochronną ma opóźnienie około 20-60 s. Dlatego w przypadkach, w których wahania temperatury są niedopuszczalne, jako czujniki stosuje się niezabezpieczone termopary otwarte. Jednak nie zawsze jest to możliwe ze względu na możliwe uszkodzenia mechaniczne czujnika, a także prądy upływowe przez termopary w urządzeniach powodujące ich nieprawidłowe działanie.
Możliwe jest osiągnięcie zmniejszenia rezerwy mocy, jeżeli piec nie jest włączany i wyłączany, ale przełączany z jednego stopnia mocy na drugi, przy czym stopień wyższy powinien być tylko nieznacznie większy od mocy pobieranej przez piec, a niższy - niewiele mniej. W takim przypadku krzywe ogrzewania i chłodzenia pieca będą bardzo płaskie, a temperatura prawie nie przekroczy martwej strefy urządzenia.
Aby dokonać takiego przełączenia z jednego stopnia mocy na drugi, konieczna jest płynna lub skokowa regulacja mocy pieca. Regulację taką można przeprowadzić w następujący sposób:
1) przełączanie grzejników pieca, na przykład z „trójkąta” na „gwiazdę”.Taka bardzo surowa regulacja wiąże się z naruszeniem jednorodności temperatury i jest stosowana tylko w domowych elektrycznych urządzeniach grzewczych,
2) połączenie szeregowe z piecem z regulowaną rezystancją czynną lub bierną. Metoda ta wiąże się z bardzo dużymi stratami energii lub obniżeniem współczynnika mocy instalacji,
3) zasilanie pieca poprzez transformator regulacyjny lub autotransformator z przełączaniem pieca na różnych poziomach napięcia. Tutaj regulacja jest również skokowa i stosunkowo zgrubna, ponieważ napięcie zasilania jest regulowane, a moc pieca jest proporcjonalna do kwadratu tego napięcia. Dodatkowo występują dodatkowe straty (w transformatorze) oraz obniżenie współczynnika mocy,
4) sterowanie fazowe przyrządami półprzewodnikowymi. W tym przypadku piec jest zasilany przez tyrystory, których kąt przełączania jest zmieniany przez układ sterowania. W ten sposób możliwe jest uzyskanie płynnej regulacji mocy pieca w szerokim zakresie, prawie bez dodatkowych strat, przy wykorzystaniu ciągłych metod regulacji – proporcjonalnej, całkującej, proporcjonalno-całkującej. Zgodnie z tymi metodami, dla każdej chwili czasu musi być spełniona zgodność między mocą pochłanianą przez piec a mocą uwalnianą w piecu.
Najskuteczniejszą ze wszystkich metod regulacji temperatury w piekarnikach elektrycznych jest regulacja impulsowa za pomocą regulatorów tyrystorowych.
Proces impulsowego sterowania mocą pieca przedstawiono na rys. 2. Częstotliwość pracy tyrystorów dobierana jest w zależności od bezwładności cieplnej elektrycznego pieca oporowego.
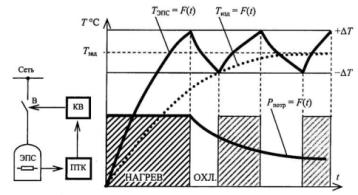
Ryż. 2.Tyrystorowy impulsowy regulator temperatury elektryczny piec oporowy
Istnieją trzy główne metody regulacji tętna:
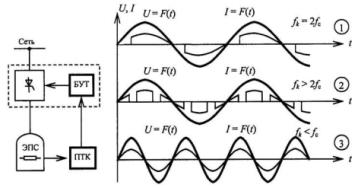
— sterowanie impulsowe przy częstotliwości przełączania — ek = 2ev (gdzie ek jest częstotliwością prądu sieci zasilającej) ze zmianą momentu zapłonu tyrystora nazywamy impulsem fazowym lub fazowym (krzywe 1),
— możliwa regulacja impulsowa ze zwiększoną częstotliwością przełączania
— regulacja impulsowa ze zmniejszoną częstotliwością przełączania (krzywe 3).
Dzięki sterowaniu impulsowemu możliwe jest uzyskanie płynnej regulacji mocy w szerokim zakresie bez dodatkowych strat, przy zapewnieniu zgodności z pobieranym piecem oraz zasilaniem z sieci.
Ryż. 3. Schemat podłączenia ciągłego regulatora temperatury
Główne elementy obwodu: BT — blok tyrystorowy składający się z 6 tyrystorów, połączonych po dwa równolegle w każdej fazie pieca, BUT — tyrystorowy blok sterujący, generuje sygnał do tyrystorowych elektrod sterujących, PTC — urządzenie sterujące ciepłem, odbiera sygnał z czujnika temperatury przetwarza i wyprowadza rozbieżność w NO, PE — element potencjometru, posiada suwak przesuwany przez ED z przekładnią mechaniczną w zależności od sygnału DT, DT — czujnik temperatury (termoelement), ISN — stabilizowane źródło napięcia stałego, KL — stycznik liniowy, VA1, VA2 — automatyczne wyłączniki zabezpieczające obwody przed zwarciem.