Obwody sterowania napędem elektrycznym
 W zależności od prędkości wind osobowych stosuje się następujące rodzaje obwodów sterowania mocą:
W zależności od prędkości wind osobowych stosuje się następujące rodzaje obwodów sterowania mocą:
-
windy wolnoobrotowe posiadają silniki klatkowe lub fazowe oraz sterowanie przyciskiem lub dźwignią,
-
windy szybkobieżne - dwu lub jednobiegowe silniki sterowane ze stacji magnetycznych lub tyrystorowych stacji sterujących (TSU-R) z przyciskami sterującymi,
-
windy szybkobieżne i szybkobieżne - silniki prądu stałego sterowane układem "generator - silnik" z różnymi schematami wzbudzenia lub układem "przetwornica tyrystorowa - silnik" z przyciskami,
-
można również zastosować łańcuchy asynchronicznych kaskad zaworów (AVK), których zastosowanie umożliwia zwiększenie wydajności. instalacja.
Windy osobowe w zależności od natężenia ruchu pasażerskiego, wysokości podnoszenia oraz liczby wind obsługujących pasażerów dzieli się na sterowanie pojedyncze i grupowe.
Single obejmują:
a) windy działające na pojedyncze polecenia i wezwania bez przekraczania przystanków podczas zjazdu i wjazdu pasażerów,
b) windy z wsiadaniem pasażerów przy zjeździe w dół, ale z zakazem wezwania przy wchodzeniu w górę,
c) to samo, ale z rejestracją wezwań podczas schodzenia z ich późniejszym wykonaniem.
Windy obsługiwane przez grupę obejmują:
a) windy z jednym przyciskiem do przywołania miejsc lądowania, niezależnie od ilości zainstalowanych wind (częściej stosowane jest sterowanie podwójne) oraz z wsiadaniem pasażerów podczas zjazdu,
b) to samo, ale z pełnym zbieraniem pasażerów na piętrach pośrednich do wsiadania i wysiadania (zwykle instalowane w budynkach administracyjnych, edukacyjnych i innych).
Ponadto bardzo często wysyła się windy do wielu domów i całych osiedli, gdy stan obwodów jest monitorowany z jednej konsoli dyspozytorskiej i sterowanych jest kilka wind.
Niezależnie od prędkości wind, sterowania nimi pojedynczo lub grupowo, niezbędnymi elementami większości ich schematów są:
-
przyciski samoregulujące, samoprzylepne lub zamykające do wywoływania taksówek i wydawania poleceń z kabiny,
-
różne czujniki selekcyjne i precyzyjne urządzenia dopasowujące do rejestracji położenia kabiny i stanu obwodów elektrycznych,
-
czujniki i blokady stanu lin wyciągowych, stanu drzwi kopalnianych i kabinowych (otwarte lub zamknięte),
-
wyłączniki krańcowe ograniczające prędkość i stopień obciążenia kabiny,
-
wskaźniki kierunku ruchu kabiny oraz, w niektórych windach, obecność ładunku w kabinie.
Spośród tych elementów bardziej szczegółowo zajmiemy się urządzeniami dopasowującymi położenie (PSC), które określają miejsce, w którym wagonik kopalniany musi się zatrzymać, gdy pojawia się wezwanie lub rozkaz, oraz jego ruch w górę lub w dół.Pozostałe pozycje to zazwyczaj różne modyfikacje wyłączników krańcowych znanych z innych kursów.
Konstrukcyjnie urządzenia dopasowujące położenie są realizowane w postaci zestawu trójpołożeniowych czujników elektromechanicznych lub indukcyjnych lub magnetycznych (kontaktronowych) rozmieszczonych w kopalniach, z wyprowadzeniem sygnałów do przekaźnika lub selektora bezdotykowego w maszynowni (CCP są czasami realizowane w postaci centralnych jednostek pięter zlokalizowanych w maszynowni) …
Czujniki znajdujące się w kopalni współpracują z zamontowanymi w kabinie odgałęzieniami (dla elektromechanicznych) lub bocznikami magnetycznymi (dla indukcyjnych lub kontaktronowych) i wysyłają sygnały do centralnej jednostki podłogowej (kopiarki krokowej lub przekaźnika) zainstalowanej w maszynowni oraz ten ostatni transmituje, a obwód kontrolny — sygnał do wykonania otrzymanego polecenia.
Bardziej celowe jest umieszczenie czujników sygnałów ruchu samochodu w górę lub w dół samochodu (potrzeba mniej przewodów) i zainstalowanie boczników magnetycznych w kopalniach w niezbędnych punktach. W tym przypadku przy sterowaniu cyfrowym liczba kolumn z zainstalowanymi bocznikami wzdłuż wału jest równa liczbie bitów przesyłanego numeru piętra w kodzie binarnym lub innym.
Trójpozycyjne przełączniki elektromechaniczne są przesuwane do jednego z położeń odpowiadających ruchowi kabiny w górę lub w dół lub jej ograniczeniu za pomocą układu zwijającego.W takim przypadku, gdy samochód jest w ruchu, styki przełączników na mijanych piętrach są włączane do jednej z pozycji krańcowych, przygotowując się do działania łańcucha wezwań i poleceń, a gdy samochód się zatrzymuje, przełącznik jest przesunięty do pozycji środkowej, wyłączając obwód sterujący ze styczników kierunkowych, a tym samym uniemożliwia opuszczenie samochodu z podłogi w przypadku omyłkowego naciśnięcia przycisku rozkazu lub wezwania.
W celu zapewnienia stosunkowo dokładnego hamowania kabiny windy, od niedawna w ich obwodach sterujących zaczęto stosować bezdotykowe czujniki indukcyjne lub szczelne stykowo sterowane magnetycznie (kontaktronowe). Czujniki te są instalowane zarówno w kopalni, jak iw kabinie: w kopalni znajdują się czujniki wyboru (opóźnienia), aw kabinie czujnik precyzyjnego zatrzymania. Aby połączyć się z czujnikami, w kokpicie umieszczono selektywny bocznik magnetyczny latarni, aw szybie (na każdym piętrze) umieszczono precyzyjne ferromagnetyczne boczniki zatrzymujące.
Czujniki indukcyjne składają się z otwartego obwodu magnetycznego w kształcie litery U z cewką zamkniętą w obudowie. Uzwojenie przekaźnika wykonawczego jest z nim połączone szeregowo i przykładane jest do nich napięcie prądu przemiennego (U).
Przy otwartym obwodzie magnetycznym strumień magnetyczny przechodzący przez cewkę jest mały. Stąd e.m.f. a prąd samoindukcji w przewodach cewki, a także wywołana przez nią rezystancja indukcyjna (X) są praktycznie nieobecne, więc rezystancja cewki jest aktywna (R). Prąd w cewkach połączonych szeregowo jest stosunkowo duży; imituje zwarcie styków w układzie styków (załączenie przekaźnika).
Kiedy bocznik zamyka obwód magnetyczny w kształcie litery U, strumień magnetyczny przechodzący przez jego cewkę wzrasta, a tym samym zwiększa się siła elektromotoryczna. indukcyjność własna i wynikająca z niej rezystancja indukcyjna cewki. W efekcie prąd w cewkach połączonych szeregowo maleje, symulując otwarcie obwodu w układzie styków (przekaźnik wykonawczy zostaje wyłączony).
Kontaktron to korpus w kształcie litery U, w którym po jednej stronie rowka umieszczone są dwie szczelne kolby szklane z próżnią w środku i stykami zamocowanymi na płytkach sprężynowych, które są podłączone do odpowiednich obwodów sterujących windą. Po drugiej stronie gniazda znajduje się magnes trwały. Elementem roboczym takich czujników jest bocznik ferromagnetyczny, który przechodzi przez wycięcie w kształcie litery U podczas ruchu kabiny windy.
Zasada działania tych czujników jest następująca: siły sprężystości płytek stykowych kontaktronów są skierowane tak, że jeśli nie działa na nie pole magnesu trwałego, to styki zwierne są rozwarte, a styki normalnie otwarte zamknięte styki są zamknięte, tj. obwody, do których te styki są podłączone, zostaną otwarte lub zamknięte.
Ten stan kontaktronu wystąpi, gdy bocznik ferromagnetyczny znajdzie się w rowku korpusu w kształcie litery U, ponieważ linie pola magnetycznego magnesu trwałego są zamknięte w poprzek bocznika.Gdy bocznik wyjdzie z rowka, linie pola magnetycznego zostaną zamknięte w poprzek bocznika płytki, pokonując ich sprężynowe działanie, oraz styki kontaktronu, a więc obwody, do których są podłączone, przechodzą w stan przeciwny.

Jako przykład odzwierciedlający główne cechy schematów sterowania windą rozważ schemat sterowania dla pojedynczej windy bez powiązanych przystanków pokazany na ryc. 1. Winda obsługuje cztery piętra; jako silnik wykonawczy zastosowano dwubiegowy silnik asynchroniczny M.
Włączenie niskich (Ml) lub wysokich (B) obrotów silnika odbywa się za pomocą odpowiednich styczników Ml i B. Kierunek obrotów silnika jest określany przez styczniki B i H, zwalnianie — przez dodatkowy rezystor P, zatrzymywanie — przez hamulec elektromagnetyczny ET.
Używane jako przełączniki podłogowe bezkontaktowe czujniki indukcyjne (DTS, DTOV i DTON) połączone szeregowo z cewkami przekaźników (RIS, RITOV, RITON). Czujniki TTP służą do załączenia napędu windy na dużą prędkość i podania impulsu do zwolnienia, natomiast czujniki DTOV i DTON służą do precyzyjnego zatrzymania windy na poziomie podłogi odpowiadającej jej kondygnacji i są umieszczane na kabinie, boczniki magnetyczne dla nich są zainstalowane w wale wału.
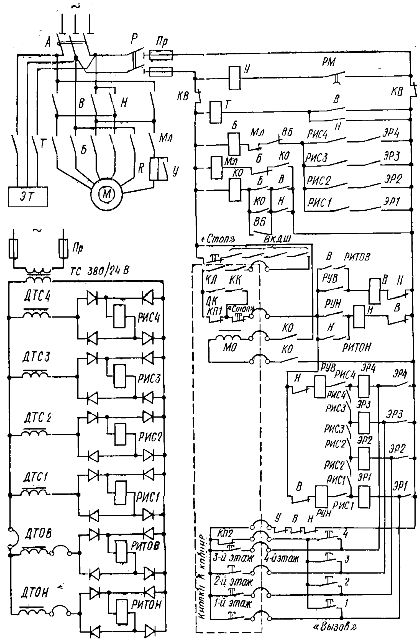
Ryż. 1. Schemat ideowy pojedynczego sterowania windą
Rozważmy przeznaczenie pozostałych elementów obwodu i jego działanie na przykładzie przemieszczania kabiny z pasażerem z I na III piętro, zakładając, że automat A, odłącznik P i wyłączniki krańcowe KB ograniczające ruch kabiny w górę iw dół w trybach awaryjnych, są zamknięte, a kabina znajduje się na parterze. W tym przypadku cewki przekaźnika RIS, oprócz przekaźnika pierwszego piętra, przepływają z prądu znamionowego.
Po naciśnięciu przycisku „3 piętro” tworzy się następujący obwód elektryczny: faza sieci — biegun odłącznika P — bezpiecznik Pr — wyłącznik krańcowy KB — przycisk „Stop” — blokada drzwi kopalni D1 — D4 — styki do napinania linka KK — krańcowy wyłącznik bezpieczeństwa KL — wyłączniki drzwi kabiny DK — styki przycisku «Stop» — blokada otwierająca - styk Н — cewka przekaźnika RUV — styki zwierne przekaźników RIS4 i RISZ (cewki tych przekaźników przewodzą prąd) — cewka przekaźnika podłogowego ERZ — przycisk «3 piętro» — bloki otwierające — styki styczników U, B, N — wyłącznik krańcowy KB — bezpiecznik R — biegun odłącznika P — faza sieci.
Po zadziałaniu przekaźnika RUV i ER3, stycznik jazdy w przód B, stycznik jazdy szybkiej B (w obwodzie cewki B — styk blokowy ML — przełącznik szybki VB — styki przekaźnika RISZ i ER3) zostają załączone. Gdy styki B i B są zwarte, silnik jest podłączony do sieci, stycznik T, rolka zwalniająca i stycznik bocznikowy KO, który włącza elektromagnes bocznikowy MO i przygotowuje obwód cewki stycznika małej prędkości Ml, są włączony. Suw cofa się, zwalniając dźwignię blokującą i kabina zaczyna się poruszać.
Gdy kabina zbliża się do trzeciego piętra, bocznik ferromagnetyczny zamyka cewkę czujnika TTSZ, jego rezystancja wzrasta, a przekaźnik RISZ znika, wyłączając przekaźniki ER3 i RUV. W rezultacie stycznik B znika, zamykając swój styk, włącza stycznik wolnych obrotów Ml, a stycznik B pozostaje włączony, ponieważ podczas jazdy obwód magnetyczny precyzyjnego czujnika hamulca nie jest jeszcze zamknięty, dlatego Kontakt RITOV nadal nie jest otwarty.Silnik jest zatrzymywany na niskich obrotach pracując w trybie generatora za pomocą rezystora R. wprowadzonego w jedną fazę stojana.
Gdy tylko podłoga samochodu zrówna się z podłogą podłogi, bocznik magnetyczny zamyka obwód magnetyczny cewki czujnika dokładnego zatrzymania DTOV, przekaźnik RITOV znika, a styczniki B, następnie KO i wreszcie ML są włączane W wyniku tego następuje odłączenie elektromagnesu silnika i hamulca od sieci, zaciągnięcie hamulca mechanicznego i zatrzymanie kabiny.
Poznanie schematu zbiorczego sterowania windami z przejazdem przystanków tylko przy opuszczaniu samochodu lub schematu w pełni zbiorowego tj. podczas mijania przystanków, gdy samochód porusza się w górę iw dół, konieczne jest w schemacie podobnym do omówionego na ryc. 1, wprowadzić kilka uzupełnień. Na przykład w obwodzie silnika o dwóch prędkościach czujniki indukcyjne ID, przekaźnik RIS oraz przyciski wywołania i zamówienia na każdym piętrze są uwzględnione, jak pokazano na rys. 2.
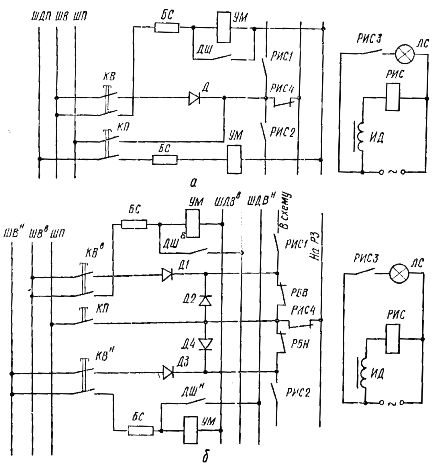
Ryż. 2. Fragmenty uzupełnień schematów sterowania windami zbiorczymi (jedna kondygnacja)
W schemacie z mijaniem przystanków podczas opuszczania kabiny (ryc. 2, a) wezwania i rozkazy są wydawane za pomocą oddzielnych lepkich przycisków, dlatego można je zarejestrować w dowolnym momencie i natychmiast przesłać do schematu, z wyjątkiem okresu ruchu kabina z pasażerami w górę, gdy szyna zasilająca styki przenoszące wywołania do obwodu wykonawczego są wyłączane przez styki selektywne z szyny dodatniej.
W pełnym schemacie sterowania selektywnego (ryc. 2, b) dodatkowo występują obwody dzwonienia do kabin (ШДВв) i opuszczania (ШДВн), styki przekaźników blokujących RBV i RBN są podłączone do styków selektywnego obwodu wykonawczego obwodu .
Na schematach pokazanych na ryc. 1 i 2, w przypadku braku kabiny na podłodze, cewki czujnika indukcyjnego ID oraz przekaźnika RIS są zasilone. Dlatego po naciśnięciu przycisku komenda komenda lub wezwaniu KV (są one utrzymywane w stanie włączonym przez magnesy utrzymujące UM, dopóki nie zostaną pokonane przez styki drzwi kopalni na tym piętrze DSh), tworzy się obwód (nie pokazany na rysunkach), który obejmuje górny przekaźnik sterujący RUV, jeśli docelowe piętro jest wyższe niż piętro parkingu, lub dolny przekaźnik sterujący LVL, jeśli docelowe piętro znajduje się poniżej parkingu.
Po przybyciu samochodu na piętro wezwania następuje odpowietrzenie ID czujnika indukcyjnego, wyłączenie przekaźnika RIS, rozwarcie jego styków, co powoduje wyłączenie przekaźnika RUV lub RUN oraz lampki LS (samochód zatrzymuje się), oraz poprzez zwarcie styku RIS4 przygotowywany jest obwód do wykonania rozkazu pochodzącego z samochodu.
W całym obwodzie zbiorczym obwód podzielony stykami RIS1 i RIS2 na podłodze parkingu samochodu jest przerywany nie tylko przez te styki, ale również przez styki przekaźnika blokującego góra RBV lub dół RBN (ich cewki nie są pokazane na schemacie), a obwody podnoszenia, opuszczania i zamawiania są oddzielone od siebie diodami separującymi D1 — D4.
Przed naciśnięciem przycisku wywołania lub polecenia, jeżeli kierunek jazdy pojazdu nie został jeszcze wybrany, wszystkie styki w obwodzie wyboru kierunku są zwarte, z wyjątkiem styków RIS4 na podłodze parkingu.Dlatego po naciśnięciu jednego z tych przycisków sygnały wywołania z pięter znajdujących się nad podłogą parkingu są podłączone do cewki przekaźnika RUN, a sygnały wywołania z pięter poniżej parkingu zawierają przekaźnik RUV. Po wybraniu kierunku, jednocześnie z przekaźnikiem RUV lub LVL, włącza się jeden z przekaźników blokujących kierunek przeciwny RBV lub RBN, który swoimi stykami przerywa wyjście przez odcinkowy obwód nieprzejściowych sygnałów wywołania.
Na schemacie pokazanym na ryc. 2, a, aby opuścić pasażerów, kabina jedzie bez zatrzymywania się do najwyższego piętra rozmowy, a następnie schodzi z mijającymi przystankami, a na schemacie pokazanym na ryc. 2, b, w przypadku konieczności odebrania pasażerów kabina schodzi na najniższe piętro wywołania, następnie wznosi się wraz z mijającymi przystankami.
W rozważanych schematach selektory są wykonane na elementach przekaźnikowych. Oprócz tego stosowane są inne selektory: krzywkowe, fotoelektryczne, ciągłe śledzenie pędzla, krokowe, na elementach statycznych itp.
Przy dużym przepływie pasażerów w jednym korytarzu instaluje się kilka wind, które łączą sterowanie w parach lub grupach w celu zwiększenia komfortu i poprawy mocy. Liczba wind połączonych w grupy zwykle nie przekracza czterech, ale częściej trzech, chociaż znane są systemy, które zawierają do ośmiu wind w grupie.
W sterowaniu grupowym istnieją zwykle trzy główne tryby działania windy: szczytowe wznoszenie, szczytowe opadanie i zrównoważony ruch w obu kierunkach. Aktywacja wind na jeden lub drugi tryb odbywa się przez dyspozytora lub automatycznie za pomocą zegara programowania zainstalowanego dla każdej grupy wind.
W wieżowcach każda grupa wind jest ustalona tak, aby obsługiwała określony obszar pięter, inne piętra nie są przez nią obsługiwane. Jeżeli w grupie znajduje się kilka wind obsługujących jeden obszar lub budynek niski, w celu zwiększenia średniej prędkości poruszania się poprzez zmniejszenie liczby przystanków można wydzielić osobne windy do obsługi pięter parzystych i nieparzystych.
Aby zapewnić podwójne lub grupowe sterowanie windami, ich obwody sterujące muszą być zbiorcze, a wywołania na każde piętro w obu kierunkach muszą być rejestrowane oddzielnie w każdym kierunku przez odpowiednie urządzenia pamięci zawierające przekaźniki, tranzystory itp.
Jako przykład oddający specyfikę pracy w sterowaniu skojarzonym windami z dodatkowymi przekaźnikami postojowymi pierwszej windy 1szt i drugiej windy 2szt rozważmy fragment schematu pokazanego na rys. 3.
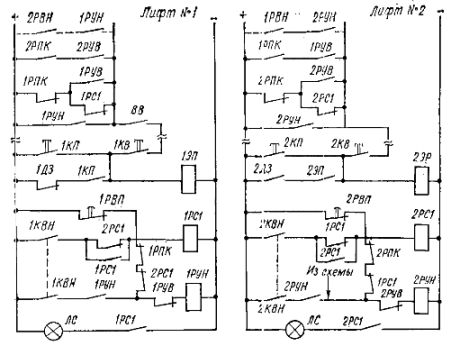
Ryż. 3. Fragment schematu sterowania windą sparowaną: ER — przekaźnik pięter, RPK — przekaźnik przełączania kanałów, przekaźnik automatycznego startu RVP
W tym przypadku samochód, który zjechał z pasażerami na pierwsze piętro, nie odbiera wezwań z innych pięter i czeka na pasażerów. Jeśli na pierwszym piętrze nie ma samochodu, to samochód, który podniósł się na polecenie i został zwolniony, jest automatycznie wysyłany na pierwsze piętro, a gdy inny samochód zostanie opuszczony lub zaparkowany, ostatni pozostanie na podłodze na koniec lotu lub trafia do centrum załadunkowego i służy do operacji wezwania głównie w kierunku tonięcia.
Przekaźnik postojowy kabiny pierwszego piętra 1PC1 lub 2PC1 jest włączany po przybyciu kabiny pierwszego piętra z wyłącznika krańcowego 1KVN lub 2KVN (zainstalowanego w kopalniach). Te przekaźniki są zablokowane.Dlatego włączenie jednego z nich wskazuje, że ten samochód przyjechał na pierwsze piętro wcześniej niż drugi. W takim przypadku przekaźnik 1PC1 lub 2PC1 swoim stykiem zwiernym włącza lampkę sygnalizacyjną LS, a swoim stykiem otwierającym przerywa obwód dzwonka swojej windy, przerywając wywołanie, gdy samochód jest zaparkowany na pierwszym piętrze.
Kiedy samochód opuszcza pierwsze piętro, gaśnie jego lampka sygnalizacyjna LS, zasilanie wywoływanych obwodów tej windy jest przywracane natychmiast po zwolnieniu wagonu, a po przybyciu wagonu innej windy na pierwsze piętro, jej przekaźnik komputerowy jest włączone. Kabina ta pozostaje na parterze i czeka na pasażerów (co sygnalizowane jest zapaleniem się lampki ostrzegawczej LS). Gdy samochód, który wstał na zamówienie, zostanie zwolniony i nie ma wezwań, do obwodu wysyłany jest sygnał, który włącza cewki przekaźnika 1RUN lub 2RUV 1RUN lub 2RUV przez styki otwierające wyłącznika krańcowego 1KVN lub 2KVN, a samochód idzie na pierwsze piętro, a t .n.
Sterowanie silnikami typowych wind pojedynczych, podwójnych i grupowych jest zwykle umieszczane na typowych panelach, stanowiskach lub jednostkach sterujących instalowanych w maszynowniach.