Obwody elektryczne napędów elektrycznych suwnic sterowanych z podłogi
Schematy kranów i funkcje ochronne
 W przemyśle, podczas operacji transportowych i magazynowych o niskiej intensywności, w maszynowniach i pomieszczeniach laboratoryjnych, wykorzystuje się dużą liczbę suwnic, pracujących sporadycznie lub z liczbą cykli podnoszenia 6 - 10 na godzinę. Zatrudnianie pełnoetatowych operatorów takich dźwigów jest ekonomicznie niepraktyczne. Z tego powodu coraz więcej suwnic obsługiwanych jest z poziomu podłogi.
W przemyśle, podczas operacji transportowych i magazynowych o niskiej intensywności, w maszynowniach i pomieszczeniach laboratoryjnych, wykorzystuje się dużą liczbę suwnic, pracujących sporadycznie lub z liczbą cykli podnoszenia 6 - 10 na godzinę. Zatrudnianie pełnoetatowych operatorów takich dźwigów jest ekonomicznie niepraktyczne. Z tego powodu coraz więcej suwnic obsługiwanych jest z poziomu podłogi.
Cechą suwnic pomostowych sterowanych z podłogi jest możliwość dostępu do suwnicy w celu naprawy i kontroli tylko w specjalnie wyznaczonych miejscach wyposażonych w odpowiednie obszary do sprawdzania mechanizmów i urządzeń elektrycznych. W związku z powyższym cały system zabezpieczenia urządzeń elektrycznych suwnicy musi być tak skonstruowany, aby w warunkach awaryjnych suwnicę można było wyprowadzić na miejsce naprawy pod kontrolą z poziomu podłogi oraz w przypadku braku suwnicy w obwodzie zwarcia i zwarcia doziemne.
W związku z tym w przypadku dźwigów z platformą wyłączniki automatyczne nie są zainstalowane.Obwody główne są zabezpieczone automatycznym wyłącznikiem zasilania wózki podstawowei zabezpieczenie obwodów sterowania — bezpieczniki dla prądów 15 A, 380 V o przekroju przewodów obwodów sterowania 2,5 mm2. Przeprowadzane jest zabezpieczenie przeciążeniowe napędów elektrycznych mechanizmów przekaźniki termiczne w głównych obwodach silników.
Aby umożliwić ruch kranu po zadziałaniu zabezpieczenia termicznego, styki przekaźnika są podłączone do przycisku na panelu sterowania. Zawór wyposażony jest w lampki sygnalizacyjne obecności napięcia na wejściu, napięcia za stycznikiem do zabezpieczenia linii oraz lampkę sygnalizującą zadziałanie zabezpieczenia termicznego.
Schematy elektryczne mechanizmów ruchu suwnic
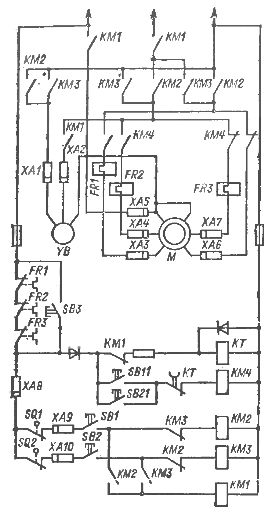
na ryc. 1 przedstawia schemat napędu elektrycznego w ruchu przy sterowaniu zwarciowym silnika jednobiegowego.
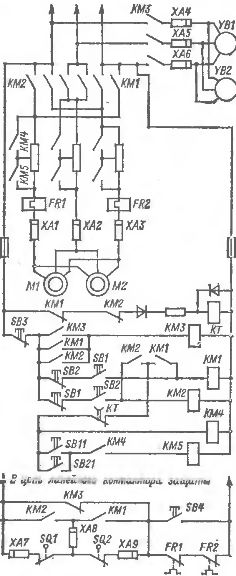
Ryż. 1. Schemat napędu elektrycznego (jednobiegowym silnikiem klatkowym) mechanizmu ruchu żurawia przy sterowaniu z podłogi: M1, M2 — silniki elektryczne, YB1, YB2 — elektromagnesy hamulców lub popychaczy elektrohydraulicznych, KM1, KM2 — styczniki kierunkowe, KM4, KM5 — styczniki rezystorowe w obwodzie stojanów, KMZ — stycznik hamulca, KT — przekaźnik czasu rozruchu, FR1, FR2 — przekaźniki termiczne, SQ1, SQ2 — wyłączniki krańcowe, SB1, SB2 — przyciski kierunku ruchu (dwa - tor), SB11, SB21 — przyciski startu, SB3 — przycisk zatrzymania swobodnego ruchu, SB4 — przycisk obejścia zabezpieczenia termicznego, XA1 — XA9 — styki wózków transferowych
Obwód ten przeznaczony jest do napędu żurawi samojezdnych o udźwigu 3-20 t oraz napędów suwnic do żurawi o udźwigu 2-5 t. Uzwojenia stojana silnika klatkowego zasilane są z sieci poprzez dwa stopnie rezystory. Charakterystykę mechaniczną napędu przedstawiono na rys. 2, A.
Sterowanie napędem elektrycznym — z podwieszanych przycisków. Sterowanie obejmuje dwa główne przyciski dwukierunkowe SB1 i SB2, które wydają polecenie ruchu w dwóch kierunkach. Przejście do pozycji bez regulacji rezystorów następuje po wydaniu komendy przyciskami SB11, SB21.
Gdy silnik jest włączony, zasilanie napędu hamulca YB jest dostarczane przez styki styczników KM1, KM2 przez styki KMZ. Po wyłączeniu silnika elektrycznego napęd hamulca nadal jest zasilany, a mechanizm pracuje swobodnie.Do zwolnienia hamulca służy przycisk SB3, który jest wspólny dla wózka i mechanizmu osi. Po uruchomieniu wyłączniki krańcowe SQ1 i SQ2, stycznik linii ochronnej zostaje wyzwolony i nałożony hamulec mechaniczny.
Aby zapewnić energię elektryczną hamowanie przeciwne po użyciu darmowego rozruchu przekaźnik czasowy CT ze zwłoką czasową 2-3 s, która spowalnia napęd do pozycji z minimalnym momentem rozruchowym (hamującym).
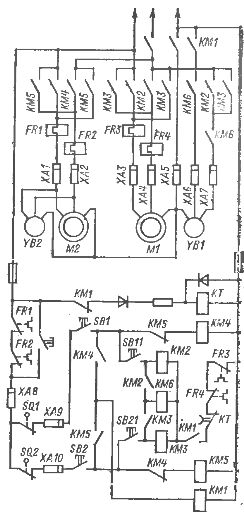
na ryc. 3 przedstawia schemat napędu elektrycznego do przemieszczania suwnicy (wózka) z pomocą dwubiegowe silniki klatkowe… Silnik ma dwa oddzielne uzwojenia o stosunku biegunów



Przycisk SB1 lub SB2 obejmuje styczniki kierunkowe KM1, KM2 oraz stycznik niskiej prędkości KM4. Po dostarczeniu zasilania do uzwojenia silnika o niskiej prędkości przez stycznik KMZ, siłownik hamulca YB1, YB2 otrzymuje moc.Aby przełączyć na wysoką prędkość, przyciski dwukierunkowe SB zamykają styki SB11, SB21 (druga pozycja) i włączają stycznik KM6.
Cewka szybkoobrotowa jest podłączona do sieci poprzez rezystor w tym samym czasie co cewka wolnoobrotowa. Cewka niskiej prędkości jest następnie wyłączana. Po opóźnieniu czasowym przekaźnika KT (2-5 s) stycznik KM5 włącza się i silnik osiąga naturalną charakterystykę trybu wysokiej prędkości (ryc. 2, b).
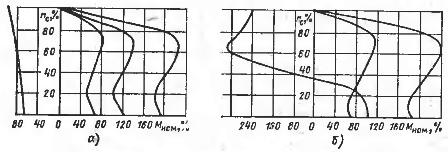
Ryż. 2. Charakterystyka mechaniczna schematów rys. 13
Gdy silnik jest odłączony od sieci, siłownik hamulca nadal otrzymuje zasilanie i następuje wybieg. Hamowanie elektryczne może być zastosowane podczas zmiany z dużej prędkości na niską. Aby zwolnić hamulec, wystarczy nacisnąć przycisk SB3.
Kiedy ostatnia obrona jest uruchamiana przez otwarcie stycznik liniowy na panelu ochronnym silnik elektryczny jest wyłączony, a hamulec mechaniczny włączony. Mechanizm jest hamowany z maksymalną intensywnością.
Ze względu na zastosowanie rezystorów w obwodzie dla uzwojeń o dużej prędkości, stosunkowo łagodny rozruch jest wykonywany pod kontrolą przekaźnika czasowego KT, ale moment hamowania uzwojenia o małej prędkości nie jest ograniczony iw tym przypadku miękki hamowanie można uzyskać za pomocą kilku przełączników impulsowych przycisku SB1 lub SB2.
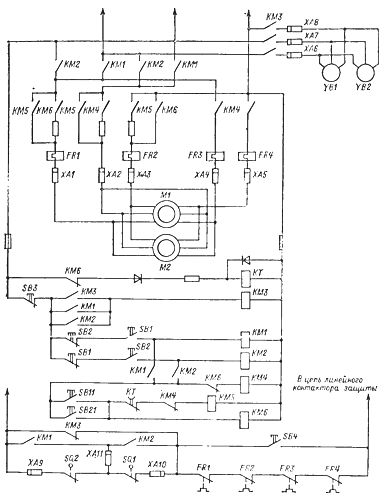
Ryż. 3. Schemat napędu elektrycznego (z dwubiegowym silnikiem klatkowym) mechanizmu ruchu żurawia przy sterowaniu z podłogi: M1.M2 - silniki elektryczne, YB1, YB2 - napędy hamulców, KM1, KM 12 - styczniki kierunku jazdy, KMZ - stycznik hamulca, KM4 - stycznik wolnych obrotów, KM5 - stycznik wysokich obrotów, KM6 - stycznik rezystorów w obwodzie stojana, FRI, FR2 , FR3 — przekaźniki termiczne, KT — przekaźnik czasowy sterowania pracą, SQ1, SQ2 — wyłączniki krańcowe, SB1, SB2 — przyciski kierunku jazdy (dwukierunkowe): SB11, SB21 — przyciski wysokiej prędkości (druga pozycja przycisku SB1, SB2), СВЗ — zwolnienie przycisku wolnego zatrzymania, SB4 — przycisk obejścia zabezpieczenia termicznego, ХА1- ~ ХЛ11 — styki wózków transmisyjnych prądu.
na ryc. 4 przedstawia schemat mechanizmu jazdy suwnicy za pomocą silnika dwubiegowego bez swobodnego drenażu. Obwód różni się od rozważanego sekwencyjnym włączeniem uzwojeń o małej i dużej prędkości oraz pewnym ograniczeniem momentu hamowania, gdy uzwojenia są połączone szeregowo. Schemat jest zalecany dla suwnic pracujących na zewnątrz.
Schematy połączeń mechanizmów podnoszenia dźwigów
na ryc. 5 przedstawia obwód sterowania elektrycznym napędem wciągnika wykorzystującym dwubiegowy silnik klatkowy z dwoma niezależnymi uzwojeniami o stosunku liczby biegunów 4/24 i 6/16. Obwód zbudowany jest na zasadzie podwójnego rozłączenia z dwóch niezależnych urządzeń obwodu głównego uzwojeń silnika elektrycznego i obwodów napędu hamulca, co zapewnia niezbędną niezawodność napędu wyciągu.
Uzwojenie silnika elektrycznego o niskiej prędkości jest zasilane przez styki stycznika sieciowego KM1, styki styczników kierunkowych KM2, KMZ i styki przerywające stycznika KM4 po naciśnięciu odpowiedniego przycisku SB1, SB2 (pierwsza pozycja).
Ryż. 4. Schemat napędu elektrycznego (z dwubiegowym silnikiem klatkowym) mechanizmu ruchu żurawia: M — silnik elektryczny, YB — napęd hamulca, KM1, KM2 — styczniki kierunku ruchu, KMZ — wolnoobrotowy Stycznik, KM4 — Stycznik szybki, KM5 — Rezystor wysokiej prędkości Stycznik, CT — Przekaźnik sterowania czasem startu, FR4 — Przekaźniki termiczne, SQ1, SQ2 — Wyłączniki krańcowe, SB1, SB2 — Przyciski kierunku jazdy, SB11, SB21 — Wysokie Przyciski prędkości, SB3 — Przycisk Bypass Thermal Relay, XA1 -XA10 — styki transferu prądu
Po naciśnięciu przycisku SB11 (SB21) cewka stycznika KM4 otrzymuje zasilanie, przełącza się z niskiej prędkości na wysoką prędkość przy minimalnej przerwie w zasilaniu. W takim przypadku nie może być żadnej pozycji, gdy cewki wysokiej i niskiej prędkości są wyłączone. Przejście z uzwojenia o małej prędkości do uzwojenia o dużej prędkości odbywa się pod kontrolą przekaźnika czasowego KT. Gdy zabezpieczenie graniczne jest aktywne, uzwojenia silnika i hamulec są aktywowane dwukrotnie.
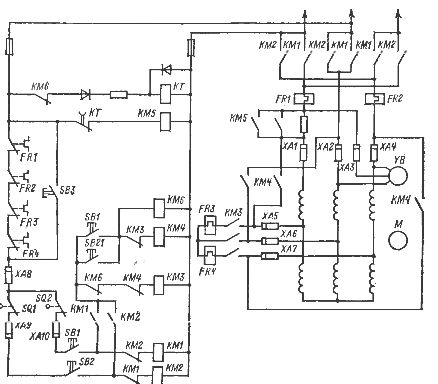
na ryc. 6 przedstawia schemat elektrycznego napędu mechanizmu podnoszącego za pomocą dwóch zwartych silników elektrycznych połączonych ze sobą iz przekładnią poprzez przekładnię planetarną o przełożeniu 6-8. Wolnoobrotowy silnik elektryczny M2 jest włączony przez cały czas pracy mechanizmu. Silnik o dużej prędkości jest włączany podczas pracy z dużą prędkością.Wolnoobrotowy silnik elektryczny ma wbudowany hamulec.
Ryż. 5. Schemat napędu elektrycznego (dwubiegowym silnikiem klatkowym) mechanizmu podnoszącego przy sterowaniu z podłogi: M — silnik elektryczny, YB — cewka hamulcowa, KM1 — stycznik lilia, KM2 — KMZ — styczniki kierunkowe, KM4 — stycznik przełączania prędkości, FR1 — FR3 — przekaźnik termiczny, CT — przekaźnik sterowania przyspieszeniem, SQ1, SQ2 — wyłączniki krańcowe, SB1, SB2 — przyciski kierunkowe (dwukierunkowe). SB3 — przycisk do bocznikowania przekaźników termicznych, SB11, SB21 — przyciski szybkie (druga pozycja przycisków SB1, SB2), XA1 — XA10 — styki wózków transferu prądu.
Ryż. 6. Schemat mikrosilnika mechanizmu podnoszącego przy sterowaniu z podłogi: M1 - silnik elektryczny szybkoobrotowy, M2 - silnik elektryczny wolnoobrotowy, YB1 - cewka hamulcowa wysokoobrotowa, YB2 - cewka hamulcowa silnika wolnoobrotowego, KM1 - stycznik liniowy, KM2 - KMZ - obroty styczników kierunkowych wysokich, KM4, KM5 - styczniki wolnoobrotowe, KM6 - stycznik hamulca szybkiego, KT - przekaźnik kontroli czasu rozruchu, SQ1, SQ2 - wyłączniki krańcowe, FR1 - FR4 - przekaźniki termiczne, SB1, SB2 - przyciski dwukierunkowe, SB11, SB21 — przyciski szybkie (druga pozycja przycisków SB1, SB2), XA1 — XA10 — styki wózków transferu prądu
Szybki silnik elektryczny ma oddzielny hamulec obsługiwany przez elektrohydrauliczny ster strumieniowy… Po naciśnięciu przycisku kierunku SB1 (SB2) cewka stycznika KM4 (KM5) jest zasilana i włącza się silnik wolnoobrotowy. W tym samym czasie włączany jest stycznik wspólnej linii KM1.
Gdy przycisk SB1 (SB2) jest wciśnięty do końca, styki SB11 (SB21) są zamknięte, cewka stycznika KM2 (KMZ) i KM6 jest zasilana, ale po upływie czasu startu niskiej prędkości pod kontrolą przekaźnika KT , silnik o dużej prędkości jest włączony.
Podczas zwalniania wznoszenia lub opadania po wyłączeniu silnika dużej prędkości, hamowanie do niskiej prędkości jest wykonywane przez hamulec YB1. Po zadziałaniu wyłączników krańcowych SQ1 i SQ2 następuje wyłączenie napędu elektrycznego przy podwójnym rozwarciu obwodu napędu silnika i hamulca.
Wszystkie opisane schematy zgodnie z zastrzeżeniem uruchomienia mechanizmów dźwigu podczas pracy z podłogi tylko przy ciągłym naciśnięciu przycisku Po wyłączeniu dowolnego rodzaju zabezpieczenia mechanizm zatrzymuje się niezależnie od stanu przycisku sterującego urządzenie.
Rozważane schematy na ryc. 2-5 można złożyć z standardowe rozruszniki magnetyczne typu PMA, PML i przekaźnik czasowy. Wyjątkiem jest schemat na ryc. 2, w którym stycznik służy do przełączania obrotów stycznik prądu stałego MK1-22, 40 A, 380 V, cewka 220 V. Zgodnie ze wskazanymi schematami wykonano panele sterowania silnikami o mocy od 0,8 do 2×8,5 kW oraz panele sterowania silnikami podnoszenia o mocy od 10 do 22 kW rozwinięty .