Węzły układów automatyki w funkcji czasu
 Elektromagnetyczne, elektroniczne, silnikowe i elektropneumatyczne są szeroko stosowane w obwodach automatyki. przekaźnik czasowy... Najczęstsze schematy konwersji czasu trwania sygnału pokazano na ryc. 1. Schemat ryc. 1 i zapewnia impuls o określonym czasie trwania, niezależnie od czasu trwania naciśnięcia guziki SB. Po naciśnięciu przycisku SB załączany jest przekaźnik K, który daje impuls do włączenia mechanizmu. Czas trwania impulsu jest określony przez opóźnienie czasowe przekaźnika KT. Przycisk SB można zastąpić przekaźnikiem sterującym KQ.
Elektromagnetyczne, elektroniczne, silnikowe i elektropneumatyczne są szeroko stosowane w obwodach automatyki. przekaźnik czasowy... Najczęstsze schematy konwersji czasu trwania sygnału pokazano na ryc. 1. Schemat ryc. 1 i zapewnia impuls o określonym czasie trwania, niezależnie od czasu trwania naciśnięcia guziki SB. Po naciśnięciu przycisku SB załączany jest przekaźnik K, który daje impuls do włączenia mechanizmu. Czas trwania impulsu jest określony przez opóźnienie czasowe przekaźnika KT. Przycisk SB można zastąpić przekaźnikiem sterującym KQ.
Schematy Ryc. 8, b (z elektromagnetycznym przekaźnikiem czasowym) i ryc. 1, c (z elektropneumatycznym lub zmotoryzowanym przekaźnikiem czasowym) służą do podania krótkotrwałego impulsu po rozpoczęciu działania nastawnika jazdy SQ. W tych i kolejnych schematach zamiast kontaktów przełącznik ruchu Można zastosować styki przekaźnika KQ.
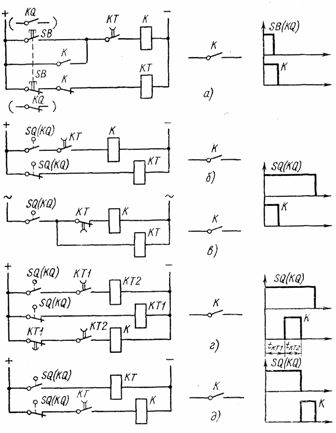
Ryż. 1. Obwody do przetwarzania czasu trwania sygnałów
Schemat ryc.1d dostarcza impuls o czasie trwania tKT2 z opóźnieniem czasowym tKT1 po rozpoczęciu działania przełącznika SQ.
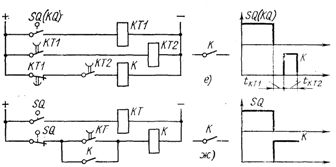
Węzeł obwodu Ryc. 1, e. Jeśli wymagane jest opóźnienie czasowe tKT1 przed podaniem tego impulsu, obwód na ryc. 1, e. Czas trwania impulsu wynosi tKT2.
W obwodach sterowania pozycyjnego obwód z ryc. 1g, który pełni funkcję wydawania długiego polecenia po zakończeniu uderzenia w wyłącznik wyzwalający SQ. Polecenie jest anulowane na początku nowej akcji na przełączniku SQ.
Krótkie opóźnienie czasowe (do 1,5 s) można uzyskać poprzez włączanie i wyłączanie w konwencjonalny sposób przekaźniki pośrednie z powodu bocznikowania ich cewek kondensatorami lub diodami.
Na schemacie rys. 2, a gdy styk KQ jest zamknięty, przekaźnik K jest uruchamiany z opóźnieniem określonym przez czas ładowania kondensatora C. Gdy KQ jest zamknięty, przekaźnik K również powraca z opóźnieniem wynikającym z rozładowania kondensatora.

Ryż. 2. Uzyskanie opóźnień czasowych przez zbocznikowanie cewek przekaźników pośredniczących kondensatorami lub diodami
Aby uzyskać opóźnienie czasowe tylko wtedy, gdy przekaźnik jest włączony, użyj obwodu z ryc. 2, b. Opóźnienie wyłączenia przekaźnika jest praktycznie nieobecne, ponieważ kondensator szybko rozładowuje się do rezystora R (rezystancja rezystora R jest znacznie mniejsza niż rezystancja cewki przekaźnika K). Podobny problem rozwiązuje obwód na ryc. 2c, który wykorzystuje jeden styk rozwierny przekaźnika KQ. Wadą tego obwodu jest znaczna utrata energii przez rezystor przy braku sygnału.
Schemat na ryc. 2d, gdzie po otwarciu styku KQ przekaźnik K wyłącza się z opóźnieniem sterowanym przez rezystor R.
Zgodnie ze schematem na rys. 2, e opóźnienie czasowe jest tworzone, gdy K jest wyłączone po zamknięciu styku przekaźnika sterującego KQ.
Jeśli wymagane jest niewielkie opóźnienie w powrocie przekaźnika K, gdy przekaźnik sterujący KQ jest aktywowany, schemat na rys. 2, e, w którym cewka przekaźnika K jest bocznikowana przez diodę.
Schemat generowania impulsów o zadanym czasie trwania i cyklu pracy pokazano na ryc. 3, A. Czas trwania impulsu jest określony przez opóźnienie czasowe przekaźnika KT2, przerwa jest określona przez czas opóźnienia przekaźnika KT1.
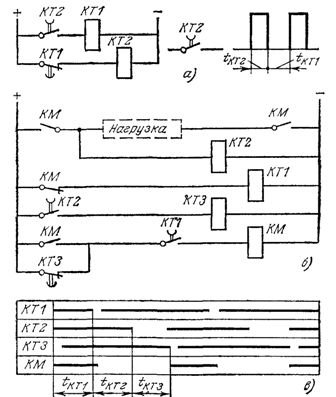
Ryż. 3. Obwody przekaźnikowe do generowania impulsów
na ryc. 3, b podano schemat okresowego załączania mechanizmu z wydłużonym czasem przerwy Czas załączenia stycznika KM jest równy zwłoce czasowej przekaźnika KT1, czas trwania przerwy to suma opóźnień przekaźnika KT2 i KTZ. Schemat czasowy pokazany jest na rys. 3, ok.
Schematy generatorów impulsów przekaźników czasowych lub elementy logiczne (patrz poniżej) służą również do regulacji szybkości działania mechanizmów liniowych. Rozpowszechnił się również regulator temperatury, zawierający urządzenie sterujące KEP-12U, pod wieloma względami podobne do przekaźnika rozrządu silnika. Jednostka posiada silnik wykonawczy, zmienne przełożenia, bęben krzywkowy, przełącznik i 12 styków.
Regulatory prędkości zwykle wykorzystują schemat cyklicznej pracy urządzenia KEP-12U (ryc. 4, a). Obwód jest wykonany za pomocą przekaźników K1 i K2 oraz styków urządzenia sterującego KT.1 i KT.2, którego schemat obwodu pokazano na ryc. 4, b.
Przed rozpoczęciem pracy włącz przełącznik S.Gdy styk przekaźnika KQ zostanie na krótko zamknięty, wydając polecenie rozpoczęcia cyklu pracy, przekaźnik K1 zostaje wzbudzony i samozatrzaskowy. Przekaźnik K2 jest aktywowany przez włączenie urządzenia sterującego KT. Uzwojenia silnika LM1 i LM2 są zasilane i bęben krzywkowy zaczyna się obracać. Styki wyjściowe urządzenia KT.3, KT.4 itp., Sekwencyjnie zamykające się, w ustalonych momentach (patrz schemat na ryc. 4, b), wydają polecenia włączenia mechanizmów liniowych. W połowie cyklu styk KT.1 otwiera się i przekaźnik K1 wyłącza się.
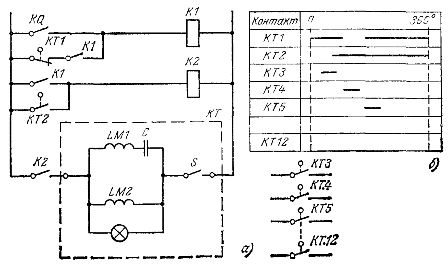
Rysunek 4. Regulator prędkości linii z urządzeniem KEP-12U
Cewka przekaźnika K2 obsługuje zasilanie poprzez styk urządzenia KT.2. Po obróceniu bębna o kąt 360° styk KT.2 otwiera się, silnik urządzenia KEP-12U zatrzymuje się. Łańcuch jest gotowy do następnego cyklu.
Podsumowując, rozważymy dwa schematy zdalnego sterowania opóźnieniem elektromagnetycznych przekaźników czasowych.
Do zmiany opóźnienia z centrali można zastosować dwucewkowy obwód przekaźnika z cewkami wyzwalającymi KT.1 i cewkami powrotnymi KT. 2 (demagnetyzacja), których MDS są skierowane przeciwnie (ryc. 5, a). MDS cewki wyzwalającej reguluje się za pomocą potencjometru RP. Aby uniknąć powtórnego zadziałania przekładnika prądowego po odwróceniu magnesowania i wyzwoleniu, MDS cewki wyzwalającej musi być mniejszy niż MDS wystarczający do pociągnięcia zwory lub własny styk zamykający przekaźnika musi być wprowadzony do cewki obwodu (rys. 5, a).
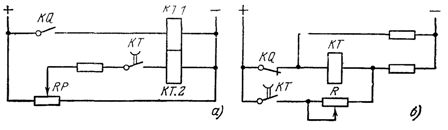
Rysunek 5. Schemat zdalnego ustawiania opóźnienia przekaźnika czasowego
Zgodnie ze schematem na rys.5, b dokonać zdalnej zmiany opóźnienia czasowego przekaźnika jednocewkowego. Gdy styk KQ otwiera się, cewka przekaźnika KT przepływa z prądem rozmagnesowania, który jest regulowany przez rezystor R. Wraz ze wzrostem prądu rozmagnesowania maleje opóźnienie przekaźnika i odwrotnie. Przy napięciu zasilania 220 V stosuje się przekaźnik z cewką na napięcie znamionowe 110 V.