Intuicyjna metoda projektowania schematów sterowania
 Metoda intuicyjna — metoda opracowywania schematów sterowania oparta na doświadczeniu zdobytym w różnych organizacjach projektowych w zakresie automatyzacji różnych mechanizmów. Opiera się na inżynierskiej intuicji projektanta.
Metoda intuicyjna — metoda opracowywania schematów sterowania oparta na doświadczeniu zdobytym w różnych organizacjach projektowych w zakresie automatyzacji różnych mechanizmów. Opiera się na inżynierskiej intuicji projektanta.
Tylko ten, kto przyswoił całe dotychczasowe doświadczenie i ma pewne umiejętności w zakresie konstruowania schematów, który potrafi myśleć abstrakcyjnie i rozumować logicznie, może doskonale opanować tę metodę. Pomimo jej złożoności, większość projektantów instalacji elektrycznych intensywnie korzysta z tej intuicyjnej metody.
Rozważmy na przykład uproszczony schemat kinematyczny dźwigni popychającej (ryc. 1). Gdy koło 5 obraca się zgodnie z ruchem wskazówek zegara, dźwignia 4 obraca dźwignię 1 wokół osi O, zmuszając w ten sposób klocek 3 wraz z dźwignią 2 do przesunięcia. Przy dalszym obrocie koła 5 kierunek ruchu dźwigni 1 zmienia się, a klocek powraca do pierwotnego położenia, po czym silnik musi się zatrzymać.
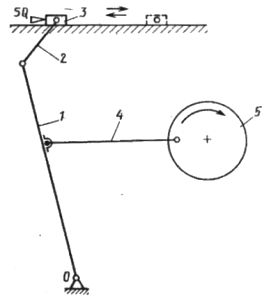
Ryż. 1. Schemat ideowy sterowania popychaczem dźwigni
Rozważany mechanizm jest typowym przedstawicielem urządzenia pchającego.W pierwszym cyklu mechanizm jest włączony i pracuje. W drugim przypadku to nie działa. Cykl, w którym mechanizm nie działa, nazywa się zerem. Chociaż but porusza się w pełni posuwisto-zwrotnie (do przodu i do tyłu), do napędu można użyć nieodwracalnego silnika elektrycznego.
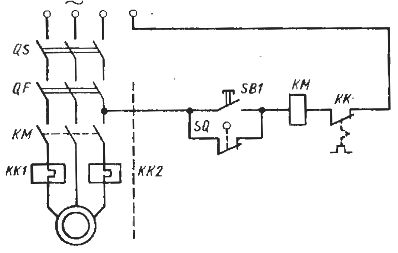
Obwód sterujący silnika elektrycznego dźwigniowo-tłokowego składa się z dwóch części (na ryc. 1 są one oddzielone linią przerywaną): obwodu mocy i obwodu sterowania.
Rozważ cel elementów obwodu mocy. Do wyłącznika QS doprowadzany jest prąd trójfazowy, który odcina zasilanie silnika elektrycznego w przypadku naprawy lub uszkodzenia rozrusznika magnetycznego. Następnie prąd przepływa przez wyłącznik, którego wyzwalacz QF pokazano na schemacie. Przeznaczony jest do zabezpieczenia i odłączenia zasilania napędu w przypadku wystąpienia prądów zwarciowych. Główne styki rozrusznika magnetycznego KM włączają lub wyłączają uzwojenie silnika elektrycznego M.
Przekaźniki termiczne KK1 i KK2, których elementy grzejne są pokazane w obwodach mocy, mają na celu ochronę silnika elektrycznego przed długotrwałymi przeciążeniami:
Schemat sterowania działa w następujący sposób. Po naciśnięciu przycisku Start SB1 cewka rozrusznika magnetycznego KM jest zasilana, a zatem styki obwodu zasilania KM są zamknięte, a prąd elektryczny wpływa do uzwojenia silnika. Wirnik silnika obraca się, a bęben zaczyna się poruszać do przodu. Jednocześnie odsuwa się od dźwigni wyłącznika krańcowego SQ i jego styki są zwarte.
Gdy przycisk startu SB1 zostanie zwolniony, a jego styki otwarte, cewka KM rozrusznika magnetycznego otrzyma zasilanie przez styki wyłącznika krańcowego SQ.Po ruchu do przodu, a następnie do tyłu, tłok naciśnie dźwignię wyłącznika krańcowego SQ, jego styki rozwarte i cewka KM wyłączy się. Spowoduje to otwarcie styków KM w obwodzie zasilania i zatrzymanie silnika elektrycznego.
Rozważany obwód zawiera obwody zasilania i sterowania. W przyszłości będą brane pod uwagę tylko schematy kontroli.
Według funkcji, tj. celowo wszystkie elementy biorące udział w działaniu obwodu można podzielić na trzy grupy: styki sterujące, elementy pośrednie i elementy wykonawcze.
Styki sterujące to elementy, za pomocą których wydawane są polecenia (przyciski sterujące, przełączniki, wyłączniki krańcowe, przetworniki pierwotne, styki przekaźników itp.).
Już sama nazwa elementów pośrednich wskazuje, że zajmują one pozycję pośrednią między elementem kontrolnym a wykonawczym. W obwodach przekaźnikowo-stykowych obejmują przekaźniki czasowe i przekaźniki pośrednie, aw obwodach bezstykowych — bramki logiczne.
Elementy wykonawcze to mechanizmy wykonawcze. Jednak przy opracowywaniu obwodów sterujących nie wykorzystuje się samych mechanizmów napędowych (silników elektrycznych czy elementów grzejnych), ale urządzenia, które je zawierają, tj. rozruszniki magnetyczne, styczniki itp.
Wszystkie styki sterujące, zgodnie z ich zasadą działania, dzielą się na pięć typów: styk startowy o krótkim działaniu (PC), styk startowy o długim działaniu (PD), styk stop o krótkim działaniu (OK), styk stop o długim działaniu (OD). ), styk start-stop (oprogramowanie). Te kontakty nazywane są głównymi.
Cyklogramy działania wszystkich typowych styków w sterowaniu mechanizmami cyklicznymi przedstawiono na ryc. 2.
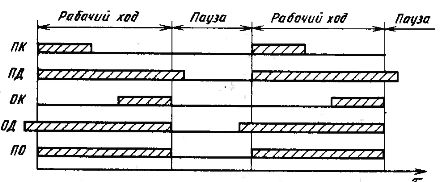
Ryż. 2.Cyklogram styków sterujących
Każdy z pięciu styków zaczyna działać (zamyka się) i kończy (otwiera) w określonych momentach. Tak więc styki startowe rozpoczynają pracę razem z początkiem suwu roboczego, ale styk YAK przestaje działać podczas suwu roboczego, OD — w czasie pauzy, czyli różnią się od siebie tylko momentami wyłączenia ( otwarcie).
Styki zatrzymujące, które w przeciwieństwie do styków rozruchowych przestają działać w tym samym czasie, co koniec skoku roboczego, różnią się momentami włączenia (zamknięcia). Styk zatrzymania OK rozpoczyna działanie podczas skoku roboczego, a styk OD - podczas przerwy. Dopiero kontakt oprogramowania rozpoczyna swoją pracę wraz z początkiem przebiegu pracy i kończy się wraz z jego końcem.
Za pomocą rozważanych pięciu głównych styków możliwe jest uzyskanie czterech schematów sterowania elementami wykonawczymi i pośrednimi, które nazywane są schematami typowymi (ryc. 3).

Ryż. 3. Typowe schematy sterowania obwodami wykonawczymi i pośrednimi
Pierwszy typowy obwód (ryc. 3, a) ma tylko jeden kontakt sterujący oprogramowaniem. Jeśli jest zamknięty, to prąd elektryczny przepływa przez siłownik X, a jeśli jest otwarty, prąd nie płynie. Styk PO ma swoje własne znaczenie, a wszystkie inne styki muszą być używane parami (start i stop).
Drugi typowy obwód ma dwa styki sterujące o działaniu ciągłym: PD i OD (ryc. 3, b).
Trzeci typowy obwód składa się ze styku startowego komputera i styku stop OD, oprócz styków sterujących obwód ten powinien zawierać styk blokujący x, przez który siłownik X będzie nadal zasilany po zestyku startowym komputer jest otwarty (ryc. 3, c).
Czwarty typowy schemat opiera się na dwóch krótkotrwałych kontaktach: uruchom komputer i zatrzymaj OK, połączone równolegle (ryc. 3, d).
Podane cztery typowe schematy pozwalają (jak z kostek) komponować złożone równolegle-szeregowe schematy sterowania stykami. Na przykład rozważany schemat sterowania dźwignią (patrz ryc. 1) opiera się na czwartym typowym schemacie. Wykorzystuje przyciski SB1 jako krótkotrwały styk rozruchu i wyłącznik krańcowy SQ jako styk krótkotrwałego zatrzymania.
Podczas opracowywania schematu sterowania za pomocą intuicyjnej metody konieczne jest prawidłowe określenie rodzaju kontaktu sterującego, czyli czasu jego działania.
Rozważ przykład opracowania schematu sterowania przy użyciu intuicyjnej metody przy użyciu typowych schematów.
Niech konieczne będzie opracowanie półautomatycznego urządzenia do sterowania wzbudnikiem oraz urządzenia do zraszania instalacji przeznaczonej do podgrzewania produktu prądami o wysokiej częstotliwości, a następnie schładzania go strumieniami wody. Czas nagrzewania produktu w induktorze wynosi 12 s, a czas chłodzenia 8 h. Produkt jest montowany ręcznie w induktorze.
Najpierw przeanalizujemy działanie urządzenia półautomatycznego i określimy wszystkie elementy wykonawcze i pośrednie. Pracownik ręcznie instaluje produkt w induktorze i naciska przycisk start.W tym momencie induktor włącza się i rozpoczyna się nagrzewanie produktu. W tym samym czasie przekaźnik czasowy powinien również się włączyć, biorąc pod uwagę czas nagrzewania (12 s).
Ten przekaźnik czasowy (a dokładniej jego styki) wyłącza cewkę indukcyjną i włącza zraszacz, który dostarcza wodę do chłodzenia. W tym samym czasie drugi przekaźnik musi być włączony, aby odliczać czas schładzania, czyli wyłączyć opryskiwacz. W ten sposób konieczne jest sterowanie czterema elementami: cewką indukcyjną, urządzeniem natryskowym i dwoma przekaźnikami czasowymi.
Cewka jest włączana i wyłączana za pomocą stycznika, dlatego konieczne jest sterowanie tym ostatnim. Sterowanie opryskiwaczem odbywa się za pomocą elektrozaworu.
Oznaczmy odpowiednio cewkę (cewkę) stycznika KM1, cewkę elektrozaworu KM2 i cewki przekaźnika czasowego KT1 i K.T2. Mamy więc dwa siłowniki: KM1 i KM2 oraz dwa elementy pośrednie: KT1 i KT2.
Z przeprowadzonej analizy wynika, że najpierw powinno ruszyć grzanie, czyli cewka KM1 będzie wzbudzona. Przycisk spustowy SB (krótkie działanie) służy jako styk startowy. Zatem zastosowanie ma albo trzeci, albo czwarty typowy schemat.
Cewkę należy odłączyć od styków przekaźnika czasowego KT1.1, które w tym przypadku są stykami o długim działaniu. Dlatego wybieramy trzeci typowy schemat. Równocześnie z uzwojeniem rozrusznika magnetycznego KM1 konieczne jest włączenie przekaźnika czasowego KT1, co jest bardzo łatwe, łącząc je równolegle.
Rozważ działanie powstałego obwodu (ryc. 4, a).
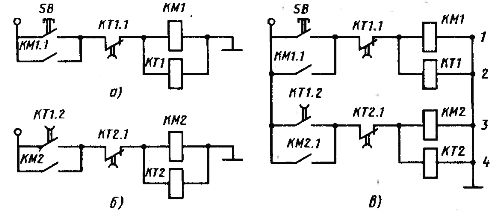
Ryż. 4.Obwody sterowania: a — cewka indukcyjna i przekaźnik czasu nagrzewania, b — urządzenie tryskaczowe i przekaźnik czasu chłodzenia, c — instalacja jako całość
Po naciśnięciu przycisku Start SB cewka stycznika KM1 jest zasilana, to znaczy rozpoczyna się ogrzewanie produktu. W tym samym czasie cewka przekaźnika czasowego KT1 zostaje zasilona i rozpoczyna odliczanie czasu grzania. Za pomocą styku blokującego KM1.1 napięcie cewki KM1 będzie utrzymywane nawet po zwolnieniu przycisku spustowego SB, tj. po otwarciu jego kontaktów.
Po upływie czasu grzania przekaźnik czasowy KT1 zadziała, jego styk KT1.1 zostanie rozwarty. Spowoduje to wyłączenie cewki KM1 (nagrzewanie produktu zostanie zakończone). Opryskiwacz powinien być teraz włączony. Może być załączony przez przekaźnik czasowy KT1 poprzez zwarcie styku. Gdy opryskiwacz jest włączony, przekaźnik czasowy KT1 jest wyłączony. Dlatego styk zamykający KT1.1 będzie stykiem krótkotrwałym. Dlatego ponownie użyjemy trzeciego typowego schematu.
Równocześnie z opryskiwaczem należy załączyć przekaźnik czasowy KT2, który odlicza czas schładzania. W tym celu wykorzystamy zastosowaną technikę i połączymy cewkę przekaźnika czasowego KT2 równolegle z cewką KM2. W ten sposób otrzymujemy drugi schemat sterowania (ryc. 4, b). Łącząc dwa obwody (ryc. 4, aib), otrzymujemy ogólny schemat sterowania (ryc. 4, c).
Rozważmy teraz działanie obwodu jako całości (ryc. 4, c). Po naciśnięciu przycisku start SB cewki stycznika KM1 i przekaźnika czasowego KT1 są zasilane i produkt zaczyna się nagrzewać.Po 12 s zadziała przekaźnik czasowy KT1 i jego styki w obwodzie 1 zostaną otwarte, aw obwodzie 2 zwarte. Produkt zacznie się ochładzać. Równocześnie z cewką KM2 elektrozaworu zostanie zasilony przekaźnik czasowy T2 odliczający czas schładzania.Rozwarcie styku KT2.1 (obwód 3) powoduje wyłączenie zaworu KM2 i przekaźnika czasowego KT2, a obwód powraca do swojej pierwotnej pozycji.
Powstały schemat sterowania induktorem i tryskaczem został opracowany przy użyciu intuicyjnej metody. Nie ma jednak dowodów na to, że schemat ten będzie poprawny i optymalny. Kwestię działania obwodu można rozwiązać dopiero po jego wyprodukowaniu i starannej weryfikacji eksperymentalnej. To jest właśnie największa wada metody intuicyjnej. Odnotowanej wady nie ma w metodzie analitycznej. Analityczna metoda opracowywania schematów sterowania zostanie omówiona w następnym artykule.