Sterowanie silnikiem w funkcji prądu
 Sterowanie silnikiem można wykonać w zależności od siły prądu stojana. Obwód rozruchowy w funkcji prądu silnika indukcyjnego z uzwojonym wirnikiem pokazano na rys. 1a.
Sterowanie silnikiem można wykonać w zależności od siły prądu stojana. Obwód rozruchowy w funkcji prądu silnika indukcyjnego z uzwojonym wirnikiem pokazano na rys. 1a.
W momencie rozruchu prąd osiąga wartość I1, a po pewnym czasie spada do wartości I2 (rys. b). W tym momencie następuje automatyczne zwarcie części rezystancji rozruchowej w obwodzie wirnika, prąd wzrasta do wartości I1, po czym ponownie spada do wartości I2, co powoduje zwarcie kolejnej części rezystancji rozruchowej. Proces ten jest powtarzany do momentu zwarcia wszystkich stopni rezystancji rozruchowej. Do tych celów stosuje się przekaźnik nadprądowy, którego uzwojenia są zawarte w obwodzie mocy silnika.
Kiedy klikniesz przycisk Start SB1 (patrz rys. A) aktywowany jest stycznik KM, którego główne styki łączą silnik z siecią przy wspólnej rezystancji rozruchowej w obwodzie wirnika. W tym przypadku cewka przekaźnika KA otrzymuje zasilanie, którego styki otwierające znajdują się w obwodzie cewki akceleratora K1.Przekaźnik KA jest tak ustawiony, że czas odpowiedzi jest krótszy niż stycznik K1. Ponadto jego styki zrywające przy maksymalnej dopuszczalnej wartości prąd rozruchowy otwarte, a gdy prąd spadnie do wartości przełączania, ponownie się zamykają, dzięki czemu cewka K1 jest włączana przez styki przekaźnika KA w momencie zwarcia początkowego stopnia rezystancji.
Przekaźnik KA zadziała przed zasileniem stycznika przyspieszenia K1, a silnik przyspieszy, gdy rezystancja rozruchowa zostanie w pełni wprowadzona. Wraz ze spadkiem początkowego prądu przełączania styki przekaźnika KA zamkną się, a cewka K1 włączy się. W tym samym czasie styk K1 zamyka się, zapewniając samozasilanie cewki niezależnie od przekaźnika KA, a styk w obwodzie sterującym otwiera się, zapobiegając przedwczesnemu włączeniu akceleratora K2.
Ponieważ styki zasilania K1 są częścią zwarcia rezystancji rozruchowej, prąd stojana wzrasta do wartości maksymalnej, a przekaźnik KA po zadziałaniu otwiera swoje styki w obwodzie zasilania cewki K2. Gdy silnik osiągnie odpowiednią prędkość i prąd stojana spadnie z powrotem do prądu przełączania, styki przekaźnika KA zamkną się i załączą cewkę K2, co spowoduje zwarcie drugiego stopnia rezystancji rozruchowej do jego styków.
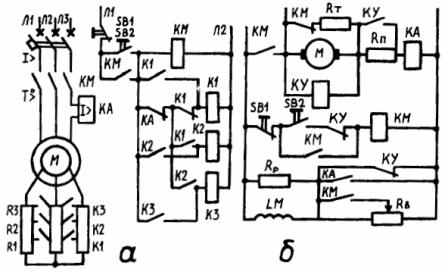
Ryż. 1. Obwody sterowania w zależności od prądu: a — silnik asynchroniczny z wirnikiem fazowym; b — Silnik prądu stałego ze wzbudzeniem równoległym
W takim przypadku prąd stojana ponownie wzrośnie, przekaźnik KA zadziała i otworzy swoje styki. Cewka K2 nie straci zasilania, ponieważ będzie miała czas na załączenie styków pomocniczych K2.Dalszy spadek prądu stojana po kolejnym przyspieszeniu spowoduje załączenie uzwojenia K3 i zwarcie ostatniego stopnia rezystancji rozruchowej. Naciśnięcie przycisku SB zatrzymuje silnik i obwód jest gotowy do następnego uruchomienia. Używając przekaźników prądowych skonfigurowanych do powrotu przy prądzie 12, różne napędy elektryczne mogą być zatrzymywane i odwracane. Wadą obwodów sterujących w bieżącej funkcji jest dość duża liczba styków.
Do nieodwracalnego sterowania silnikiem prądu stałego o wzbudzeniu równoległym o mocy kilku kilowatów można zastosować pojedynczy stopień reostatu rozruchowego (patrz ryc. C). Schemat przedstawia: rezystancję regulacyjną RB w obwodzie wzbudzenia; rezystancja wyładowania Rp połączona równolegle z cewką wzbudzenia LM; rezystancja hamowania RT połączona równolegle do twornika M po odłączeniu od sieci i rezystancja rozruchowa RP połączona szeregowo z obwodem twornika podczas okresu rozruchu. Aby wytworzyć maksymalny strumień przy rozruchu, cewka polowa LM w pozycji początkowej jest włączana przy pełnym napięciu.
Po naciśnięciu przycisku SB2 twornik silnika ze stycznika sieciowego KM jest włączany szeregowo do sieci z rezystancją RP Przekaźnik sterujący rozrusznika SC działa w zależności od prądu twornika. Gdy prąd wzrasta, zamykający styk KA manipuluje rezystancją RB, zwiększając strumień magnetyczny wzbudzenia, a gdy prąd maleje, styk KA otwiera się i cewka LM jest połączona szeregowo z rezystancją reostatu RB, z powodu w którym prąd magnetyczny maleje.
Gdy silnik jest uruchamiany, zwiększony prąd twornika rozruchowego włącza przekaźnik KA, a cewka LM wytwarza maksymalny strumień. Po osiągnięciu określonej prędkości stycznik przyspieszenia K zostaje włączony, rezystancja rozruchowa RP zostaje zwarta, po czym silnik pracuje zgodnie ze swoimi naturalnymi właściwościami. Gdy prąd twornika spadnie (w wyniku przyspieszenia silnika) przed załączeniem przekaźnika KA, styk KA w obwodzie wzbudzenia zostanie otwarty.
Uzwojenie LM włączy się szeregowo z rezystancją RB, powodując osłabienie strumienia pola i odpowiedni wzrost prądu twornika. Przekaźnik KA zadziała ponownie, zwiększając strumień i jednocześnie zwiększając prędkość silnika. Podczas uruchamiania przekaźnik statku kosmicznego jest wyzwalany kilka razy, aż silnik osiągnie prędkość ustawioną przez reostat sterujący RB. Takie urządzenie wibracyjne działające jako funkcja prądowa upraszcza obwód w porównaniu do obwodów sterujących w funkcji czasu.
Włączenie silnika przyciskiem SB1 powoduje załączenie zwory od styku otwierającego KM do rezystora hamującego RT i automatyczne hamowanie dynamiczne. Na początku zatrzymania pole magnetyczne jest nieco osłabione z powodu otwarcia styku KM na suwaku reostatu regulacyjnego, a prąd wzbudzenia przechodzi przez całą rezystancję RB. Gdy prędkość silnika dalej spada, stycznik przyspieszenia K zostaje odłączony od zasilania, a strumień wzrasta, gdy cewka wzbudzenia jest włączana do pełnego napięcia sieciowego przez styk otwierający K, co powoduje wzrost momentu hamowania.