Łańcuchy napędowe przenośników
 W artykule przeanalizowano schematy napędu elektrycznego niektórych przenośników. na ryc. 1 przedstawia schemat ideowy napędu elektrycznego poszczególnych linii transportowych, których prędkości muszą być ściśle takie same. Taka potrzeba pojawia się w produkcji ciągłej, kiedy różne produkty, po niezbędnych operacjach technologicznych na oddzielnych liniach, muszą spotkać się na miejscu montażu w ścisłej ze sobą zgodności.
W artykule przeanalizowano schematy napędu elektrycznego niektórych przenośników. na ryc. 1 przedstawia schemat ideowy napędu elektrycznego poszczególnych linii transportowych, których prędkości muszą być ściśle takie same. Taka potrzeba pojawia się w produkcji ciągłej, kiedy różne produkty, po niezbędnych operacjach technologicznych na oddzielnych liniach, muszą spotkać się na miejscu montażu w ścisłej ze sobą zgodności.
Schemat pozwala na jednoczesne uruchamianie i zatrzymywanie kilku linii przenośników oraz regulację ich prędkości. Skoordynowany ruch uzyskuje się poprzez przełączanie silników zgodnie ze schematem wału synchronicznego ze wspólną przetwornicą częstotliwości. Sterowanie prędkością silników D1 i D2 odbywa się poprzez zmianę prędkości falownika za pomocą przekładni o zmiennym przełożeniu P.
Zezwolenia na uruchomienie przenośników udzielają operatorzy, którzy monitorują pracę przenośników w najbardziej krytycznych obszarach. Po naciśnięciu przycisków gotowości G1 i G2 zapalają się lampki sygnalizacyjne LS1 i LS2 oraz aktywowane są przekaźniki RG1 i RG2. Te ostatnie przygotowują przekaźnik do uruchomienia RP.
Po naciśnięciu przycisku Start wyzwalany jest RP, który włącza stycznik L1. Istnieje jednofazowa synchronizacja pozycji falownika, D1 i D2. Po zwłokach czasowych przekaźniki wahadłowe wbudowane w styczniki L1 i L2 na przemian włączają L2, wyłączają L1 i włączają LZ. Uruchomienie reostatu silnika przetwornicy częstotliwości odbywa się zgodnie z zasadą czasu (przekaźniki czasowe RU1, RU2, RUZ).
na ryc. 2 przedstawiono schemat elektrycznego napędu schodów ruchomych metra, który umożliwia pracę przy wznoszeniu i opadaniu pasażerów. Jako silnik napędowy zastosowano silnik asynchroniczny z wirnikiem fazowym o mocy do 200 kW. W określonych porach dnia, przy niewielkim przepływie pasażerów, schody ruchome mogą pracować prawie na biegu jałowym przez długi czas.
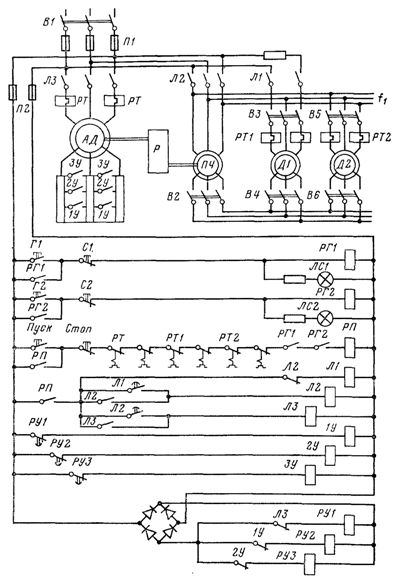
Ryż. 1. Schemat elektrycznego napędu linii transportowych o ruchu skoordynowanym.
Aby zwiększyć współczynnik mocy i sprawność silnika, gdy obciążenie jego wału jest zmniejszone do około 40% wartości nominalnej, uzwojenie stojana jest przełączane z trójkąta na gwiazdę. Wraz ze wzrostem obciążenia zmienia się z powrotem w trójkąt.
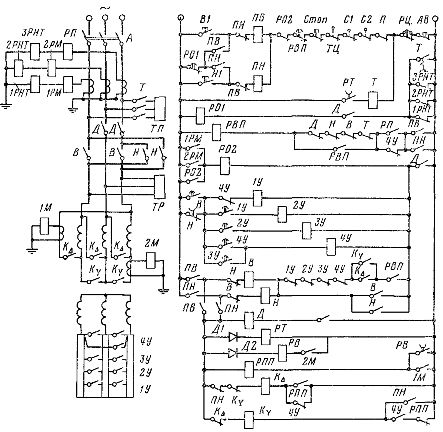
Ryż. 2. Schemat napędu elektrycznego schodów ruchomych metra.
Wspomniane przełączenie jest realizowane automatycznie przez przekaźniki nadprądowe 1M i 2M, które poprzez przekaźniki RPP i РВ sterują stycznikami k∆ i kY. Opóźnienie otwarcia styku RV zapewnia obecność obwodu cewki RPP w okresie od 2M wyłączony do 1M włączony.
W trybie zjazdu generatora przy pełnym obciążeniu silnik jest znacznie mniej obciążony (ze względu na straty mechaniczne instalacji) niż przy podobnym obciążeniu w trybie wznoszenia.Dlatego w trybie statyzmu uzwojenie stojana silnika jest zawsze połączone w gwiazdę. Silnik jest uruchamiany w funkcji czasu za pomocą przekaźników wahadłowych na stycznikach akceleratora 1U-4U. Ogranicznik jest mechaniczny. W takim przypadku hamulec roboczy TP jest zainstalowany na wale silnika, a zabezpieczenie TP jest zainstalowane na wale napędowym, aby zapewnić zatrzymanie drabiny w przypadku zerwania połączenia mechanicznego między przekładnią a wałem silnika.
Obwód realizuje typowe blokady bezpieczeństwa opisane w poprzedniej sekcji: od nieprawidłowego działania części mechanicznej urządzenia — usunięcie łańcuchów i poręczy (wyłączniki krańcowe TC, P), naruszenie konstrukcji stopni (wyłączniki krańcowe C1 i C2 ), nadmiernej temperatury łożysk (przekaźnik termiczny 7), od nadmiernej prędkości obrotowej (przekaźnik prędkości odśrodkowej RC).
Dodatkowo zapewnione jest zabezpieczenie silnika: maksymalne (przekaźnik 1RM, 2RM), od przeciążenia (przekaźnik RP), od zaniku zasilania silnika (przekaźnik zerowy 1RNT, 2RNT, 3RNT), od zespawania styków zwiernych styczników mocy ( rozwarcie styków D, Y, B, T w obwodzie cewki RVP i 1U-4U w obwodzie cewki B).
Zabezpieczenie przed utratą zasilania, przegrzaniem łożysk i przeciążeniem silnika działa z opóźnieniem określonym przez przekaźnik czasowy PO1 i RVP. Wszystkie zabezpieczenia, z wyjątkiem przekaźnika prędkości zdalnego sterowania, zatrzymują silnik poprzez odłączenie go od sieci i zaciągnięcie hamulca głównego TP. Dopiero na końcu procesu hamowania, po upływie zwłoki przekaźnika PT, następuje dodatkowo zadziałanie hamulca bezpieczeństwa TP.Po uruchomieniu przekaźnika prędkości RC lub naciśnięciu przycisku zatrzymania awaryjnego oba hamulce są uruchamiane jednocześnie.