Odmiany obwodów przekaźnikowych
Układy przekaźnikowe zajmują poczesne miejsce wśród wielu urządzeń automatyki. Ich cechą charakterystyczną jest gwałtowna zmiana wartości regulowanej (wyjściowej) przy zmianie wartości wejściowej. Innymi słowy, każdy element systemu przekaźnikowego może przyjmować tylko dwa stany: „włączony” lub „wyłączony”. Najbardziej typowe i powszechne są obwody przekaźnikowe składające się z kontaktowe elementy elektromagnetyczne (przekaźniki).
Ze względu na charakter pracy systemy przekaźników dzielą się na jednocyklowe i wielocyklowe.
W systemach z pojedynczą pętlą stan napędów jest jednoznacznie określany przez stan elementów odbiorczych w dowolnym momencie. W ich działaniach nie ma wyraźnej kolejności i dlatego nie ma potrzeby stosowania elementów pośrednich. Innymi słowy, w systemie jednopętlowym pewna kombinacja sygnałów wejściowych (argumentów) odpowiada określonej wartości wielkości wyjściowej (funkcji). Opisując schematy takich systemów, nie można używać pojęć „przed”, „po”, „bye” itp., które charakteryzują kolejność wprowadzania argumentów.
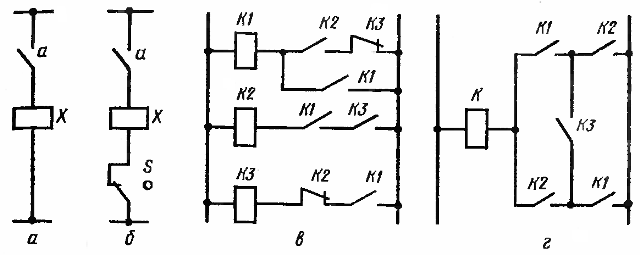
Ryż. 1.Odmiany obwodów przekaźnikowych: a — jednocyklowe, b — wielocyklowe, c — typ P, d — typ H.
Na przykład w pojedynczym obwodzie pokazanym na rysunku 1, a, działanie elementu uruchamiającego X jest jednoznacznie zależne od działania elementu odbiorczego — styku zamykającego a. Nie ma tu elementów pośrednich.
W systemach wielocyklowych w pracy elementów odbiorczych i wykonawczych zapewniona jest pewna sekwencja, do realizacji której konieczna jest obecność elementów pośrednich. Dlatego kilka funkcji może dopasować argumenty tej samej kombinacji, ale zgodnie z danymi w różnych punktach w czasie.
Tak więc w obwodzie z rysunku 1, b działanie siłownika X jest określone nie tylko przez działanie elementu odbiorczego - styku zamykającego a, ale także przez element pośredni S.
Obraz schematu systemu przekaźnikowego, przedstawiający liczbę i skład elementów konstrukcyjnych, a także konfigurację połączeń między elementami, nazywany jest strukturą obwodu przekaźnikowego. Część obwodu przekaźnika zawierająca tylko styki nazywana jest obwodem stykowym.
Najczęściej strukturę obwodów przekaźnikowych przedstawia się graficznie w postaci symboli elementów i ich połączeń. Każdy element graficzny obwodu otrzymuje oznaczenie literowe.
Według GOST cewki styków, rozruszniki magnetyczne, przekaźniki są oznaczone literą K. Jeśli w obwodzie jest kilka elementów, wówczas do oznaczenia literowego dodaje się liczbę odpowiadającą numerowi seryjnemu elementu na schemacie. Możesz użyć oznaczenia dwuliterowego: na przykład cewki stycznika, rozrusznika magnetycznego są oznaczone jako KM, przekaźnik czasowy KT, przekaźnik napięciowy KV, przekaźnik prądowy KA itp.Styki elementów mają takie same oznaczenia jak cewki. Na przykład K4 jest czwartym przekaźnikiem i wszystkie styki tego przekaźnika będą miały to samo oznaczenie.
W zależności od rodzaju połączeń wyróżnia się obwody równoległe (typ P) oraz z połączeniami mostkowymi (typ H). W obwodach typu P (ryc. 1, c) styki i cewki różnych elementów są połączone szeregowo ze sobą, a poszczególne obwody równolegle. W obwodach typu H (ryc. 1, d) obecność elementów mostkowych (element zwierający) prowadzi do równoczesnych połączeń szeregowych i równoległych w różnych obwodach. Obwody mostkowe mają znacznie mniej styków niż obwody typu P.

Badając systemy automatyki przekaźnikowej, rozwiązują głównie dwa problemy:
-
pierwszy sprowadza się do analizy obwodów przekaźnikowych, czyli do określenia warunków pracy każdego przekaźnika i kolejności ich działania,
-
drugi — do syntezy schematów, czyli do znalezienia struktury obwodu zgodnie z zadanymi warunkami jego działania.
Analiza i synteza umożliwiają uzyskanie schematu elektrycznego układu z minimalną możliwą liczbą przekaźników i styków. Podczas badania stanów stacjonarnych poszczególnych elementów układów automatyki przekaźnikowej, bez uwzględnienia ich zachowania w czasie, szeroko stosuje się specjalny aparat matematyczny - tzw. algebra logiki.