Obwody sterowania silnikiem jako funkcja prędkości
 W sterowaniu silnikiem prędkość jest monitorowana jako funkcja prędkości wirnika silnika, aby wpływać na odpowiednie elementy sterujące w miarę jej zmian.
W sterowaniu silnikiem prędkość jest monitorowana jako funkcja prędkości wirnika silnika, aby wpływać na odpowiednie elementy sterujące w miarę jej zmian.
Przekaźniki kontroli prędkości lub małe prądnice pomiarowe mogą być stosowane w obwodach sterowania rozruchem silnika. Jednak są one używane niezwykle rzadko do tych celów ze względu na złożoność projektu, wysokie koszty i niewystarczającą niezawodność. Dlatego prędkość obrotowa silnika jest kontrolowana metodami pośrednimi. W silnikach asynchronicznych i synchronicznych częstotliwość obrotowa jest kontrolowana przez emf i częstotliwość prądu wirnika, aw silnikach prądu stałego przez emf twornika.
na ryc. 1, aib przedstawiają schematy automatycznego rozruchu silnika prądu stałego o wzbudzeniu równoległym w zależności od częstotliwości wirowania oraz w zależności od pola elektromagnetycznego i napięcia twornika od momentu rozruchu. Kontrola częstotliwości obrotowej odbywa się poprzez pomiar pola elektromagnetycznego silnika, które zmienia się proporcjonalnie do częstotliwości obrotowej.
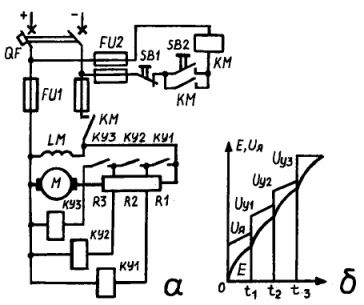
Ryż. 1.Obwody sterowania w funkcji prędkości: aib — schemat obwodu i rozruchu silnika prądu stałego o wzbudzeniu równoległym
Ponieważ EMF jest proporcjonalny do prędkości obrotowej silnika, automatyczne wprowadzanie poszczególnych stopni reostatu rozruchowego odbywa się przy określonej wielkości napięcia uruchamiającego styczników przyspieszających KM1, KM2 i KMZ, z których każdy jest ustawiony na określone wycofanie wartość. Naciskając rozrusznik guziki SB2 włącza stycznik linii KM. Wszystkie rezystancje R1, R2, R3 zostaną połączone szeregowo z uzwojeniem twornika i ograniczą prąd.
Przy określonej prędkości n1 napięcie Uy1 cewki stycznika K1 wynosi

gdzie Tutaj To jest współczynnik maszyny.
Kiedy Uy1 będzie równe napięciu obniżającemu, stycznik KM1 zadziała i zwiera rezystancję R1. Dalsze zwiększanie prędkości obrotowej aż do obrotów n2 i n3 spowoduje wzrost napięcia na cewkach styczników K2 i zwarcie do wartości


W takim przypadku styczniki K2 i zwarcie będą działać szeregowo i zwierają rezystancje R2 i R3. Po zwarciu rezystancji R3 proces rozruchu zostanie zakończony i silnik może pracować przez długi czas.
SEM w obwodzie wirnika silnika indukcyjnego jest proporcjonalna do poślizgu, tj. E2s = E2s. Tutaj E2 jest emf nieruchomego wirnika.
Im mniejszy poślizg, tym mniejsza EMF, czyli wyższa prędkość wirnika silnika. Do sterowania rozruchem silników prądu przemiennego z uzwojonym wirnikiem stosuje się przekaźniki kontrolujące wartość pola elektromagnetycznego w obwodzie wirnika.Odpowiednie urządzenia (przekaźniki, styczniki) zwierające rezystancje rozruchowe są dostosowane do tych napięć.
Do sterowania silnikami indukcyjnymi i silnikami synchronicznymi z wirnikiem uzwojonym można również zastosować metodę częstotliwości w funkcji prędkości. Metoda ta opiera się na znanej zależności częstotliwości prądu wirnika f2 od częstotliwości wirowania pola stojana n0 i wirnika n2, tj.
Ponieważ każda prędkość wirnika odpowiada określonej wartości f2, przekaźnik ustawiony na tę częstotliwość i podłączony do obwodu wirnika silnika będzie działał na obwód cewki stycznika. Stycznik zwiera stopnie rezystancji przy danej prędkości.
Hamowanie przeciwstawnymi silnikami odbywa się w zależności od prędkości przekaźnik kontroli prędkości SR. Na ryc. 2 a, b pokazano przykłady zatrzymania silników asynchronicznych przez opozycję.
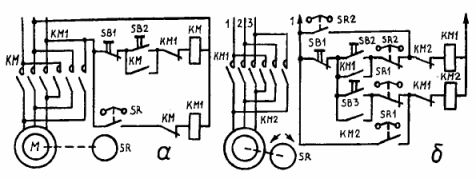
Ryż. 2. Schematy zatrzymania silników asynchronicznych przez opozycję: a — nieodwracalne; b - odwracalny
Przyjrzyjmy się, jak działają te schematy.
Naciśnięcie przycisku SB2 włącza cewkę stycznika KM (patrz ryc. 2, a), która zamyka styki mocy i blokuje przycisk SB2. Jednocześnie styk bloku otwierającego KM w obwodzie cewki stycznika hamulca KM1 i przekaźnika kontroli prędkości SR odłącza je od sieci. Gdy wirnik silnika osiągnie określoną prędkość, styk SR zamknie się, ale nie spowoduje to już zadziałania stycznika KM1. Silnik nadal pracuje normalnie.
Zatrzymanie silnika hamulcem przeciwbieżnym odbywa się poprzez naciśnięcie przycisku SB.W tym samym czasie cewka stycznika KM zostaje zneutralizowana, a jego główne styki znikają i odłączają silnik od sieci. Styk otwierający KM w obwodzie stycznika hamulca KM1 zamknie się. Ponieważ w tym momencie styk przekaźnika kontroli prędkości SR jest zamknięty, główne styki stycznika hamulca są natychmiast włączane, a uzwojenie stojana jest przełączane do tyłu, pole magnetyczne zacznie się obracać w przeciwnym kierunku, tj. obrót wirnika i silnika zostanie zatrzymany przez przełączenie licznika. Prędkość wirnika maleje i przy pewnej małej wartości jego styki przekaźnika regulacji prędkości RKS otworzą się i odłączą silnik od sieci.
W przypadku sterowania rewersyjnego z przeciwległym hamowaniem (rys. 2, b) uruchomienie silnika do przodu następuje po naciśnięciu przycisku SB1, który poprzez zamknięcie obwodu cewki stycznika KM1 zapewnia podłączenie silnika do sieć. Wirnik silnika zacznie się obracać, a gdy osiągnie określoną prędkość, styk zamykający SR1 przekaźnika kontroli prędkości zamknie się, a styk otwierający SR2 otworzy się.
Załączenie cewki stycznika KM2 nie nastąpi, ponieważ styk otwierający stycznika KM1 przerwał swój obwód. W tej pozycji silnik będzie pracował do momentu naciśnięcia przycisku SB. Po naciśnięciu przycisku SB obwód cewki KM1 zostaje wyłączony. Spowoduje to zamknięcie styku rozwiernego KM1, a obwód cewki stycznika KM2 otrzyma zasilanie.
Uzwojenie stojana silnika włączy się do tyłu. Gdy wirnik nadal obraca się w tym samym kierunku przez bezwładność, następuje hamowanie przeciwne.Gdy prędkość spadnie do pewnej małej wartości, przekaźnik kontroli prędkości otwiera swój styk SR1, stycznik KM2 wyłączy się i odłączy silnik od sieci.
Aby uruchomić silnik na biegu wstecznym, naciśnij przycisk SB2. Cały proces będzie podobny do opisanego. Teraz rolę stycznika hamulca pełni stycznik KM1, a styki SR2 przekaźnika kontroli prędkości będą sterować procesem hamowania.
Automatyczne uruchamianie silnika synchronicznego wiąże się ze znanymi trudnościami, ponieważ w tym przypadku konieczne jest nie tylko ograniczenie prądu rozruchowego, ale także synchronizacja maszyny z siecią.
Obwód sterowania silnika synchronicznego małej mocy pokazano na ryc. 3. Ograniczenie prądu rozruchowego zapewniają rezystancje czynne zawarte w uzwojeniu stojana. Przed uruchomieniem silnika włącz automatyczne przełączniki wejściowe QF i QF1 sieci AC i DC, które zapewniają ochronę maksymalną i termiczną. Naciśnięcie przycisku startu SB2 powoduje włączenie cewki stycznika KM, a uzwojenie stojana silnika synchronicznego przez styki główne KM jest podłączone do sieci przez rezystory rozruchowe Rn. Cewka jest samoblokująca, a jej styk w obwodzie prądu stałego zawiera przekaźnik blokujący KV, którego styk zamykający, zamykając się, przygotowuje cewki styczników K1 i K2 do załączenia.
Przekaźniki częstotliwości KF1 i KF2 w obwodzie wzbudzenia wirnika LM działają w zależności od prędkości obrotowej silnika Podczas rozruchu, gdy poślizg wirnika jest największy, styki rozwierne przekaźników KF1 i KF2 otwierają się.Otwarcie cewek następuje przed załączeniem przekaźnika blokującego KV i cewka K1 nie otrzyma zasilania. Styki przekaźnika KF1 i KF2 zamkną się ponownie, gdy obroty silnika osiągną synchronicznie około 60-95% zgodnie z regulacją przekaźnika.
Po zwarciu styków przekaźnika KF1 cewka stycznika K1 załączy się, jego styki w obwodzie głównym zewrą rezystory rozruchowe Rp i stojan włączy się do pełnego napięcia sieciowego. Gdy otwarte styki przekaźnika KF2 są zamknięte, tworzony jest obwód zasilający cewkę stycznika K2, niezależnie od stycznika K1 jego styk otwiera się z prędkością około 60% prędkości synchronicznej.
Stycznik K2 posiada dwa uzwojenia: jedno główne, ciągnące KM1 oraz drugie uzwojenie KM2, przeznaczone do zwalniania blokady, w którą wyposażony jest stycznik. Po włączeniu cewki odbiorczej KM1 styki zamykające K2 zamykają się w obwodzie wzbudzenia, a styki otwierające K2 otwierają się, odłączając uzwojenie wirnika od rezystorów rozładowczych R1 i R2 i podłączając wirnik do sieci prądu stałego.
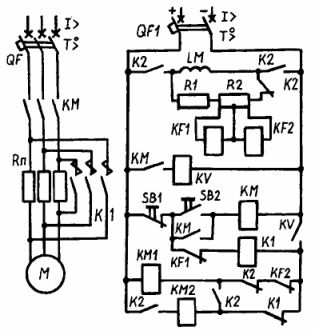
Ryż. 3. Schemat sterowania silnikiem synchronicznym
Styki stycznika K2 działają w następującej kolejności. Styk zwierny K2 otwiera się w obwodzie zasilania cewki odbiorczej, ale działanie blokujące utrzymuje napięcie stycznika. Styki zamykające K2 zamykają się w obwodzie zasilania obu cewek oraz w obwodzie cewki KM2, przygotowując obwód do późniejszego załączenia. Cewka K2 zostanie odłączona od napięcia, gdy tylko mechanizm blokujący zostanie zwolniony z cewki KM2. Silnik jest odłączany od sieci poprzez naciśnięcie przycisku SB1.Cewka K1 zwalnia swój styk rozwierny w obwodzie cewki KM2, co powoduje zwolnienie zatrzasku i wyłączenie cewki KM1, po czym obwód powraca do pierwotnego położenia.