Tłokowa kontrola ruchu mechanizmów
Obwody przekaźnikowe
 na ryc. 1 przedstawia różne warianty schematów sterowania ruchem tłoka o stałym skoku ustalone przez sterownik SQ.
na ryc. 1 przedstawia różne warianty schematów sterowania ruchem tłoka o stałym skoku ustalone przez sterownik SQ.
Diagramy na ryc. 1, a-c stosuje się, gdy cykl składa się z jednego ruchu „do przodu” B i jednego ruchu „do tyłu” H do pozycji wyjściowej. Schematy 1, aib są używane z automatycznym poleceniem wydanym przez przekaźnik KQ. Przekaźnik KT zapewnia pauzę przed rozpoczęciem biegu wstecznego. Na schemacie rys. 1 polecenie rozpoczęcia cyklu wydaje sterownik lub uniwersalny przełącznik SM.
Aby zaimplementować nieskończony ruch posuwisto-zwrotny, schemat na ryc. 1, d. Jeżeli liczba skoków musi być ograniczona przez zadaną wartość n, to otwarty styk przekaźnika zliczającego lub zespół kilku przekaźników, który zlicza impulsy dostarczane przez styk zwierny stycznika „tylnego” KM2, jest zawarte w obwodzie stycznika „do przodu” KM1.
Przykład realizacji ruchu posuwisto-zwrotnego o zmiennej długości skoku w czterech pozycjach pokazano na rys. 2.Styki SQ.1- SQ.4- urządzenia sterującego SQ służą do alternatywnego wyłączania mechanizmu w pozycjach 1—4 skoku „do przodu”, styk SQ.5- w pozycji wyjściowej. Obwód wykorzystuje polecenia impulsowe wydawane przez przekaźnik automatyki KQ1, który jest zamknięty, na przykład podczas podawania przedmiotu obrabianego, oraz KQ2, który ustala koniec operacji pośredniej na końcu każdego skoku.
Sekwencyjne manewrowanie SQ.1 — SQ.3 sterownika SQ odbywa się za pomocą styków przekaźnika zliczania liczby ruchów mechanizmu „powrotnego” KS1, KSZ i KS5. Przekaźnik KS7, ustalając czwarty ruch „wstecz”, wyłącza przekaźnik KS1-KC6 i zabrania kolejnego załączenia „do przodu” do czasu, aż niebieski dotrze do końca operacji technologicznej z tą grupą wykrojów (przekaźnik KR). Styk rozwarcia przekaźnika KR w obwodzie cewki KC7 przywraca obwód do pierwotnego stanu.
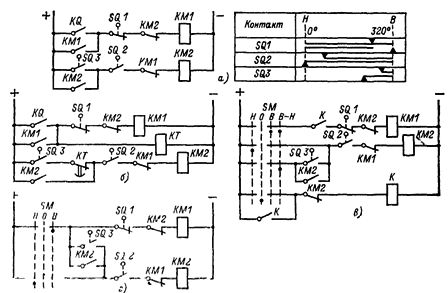
Ryż. 1. Przekaźnikowe obwody sterujące ruchem posuwisto-zwrotnym
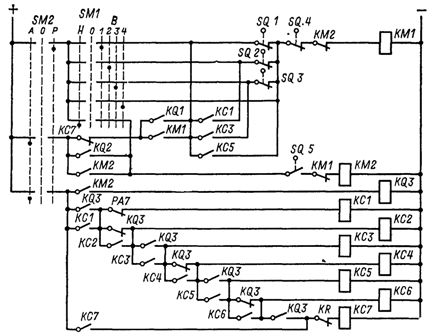
Rysunek 2. Schemat sterowania przekaźnika tłokowego o zmiennej długości skoku
Obwód logiczny
Obwód sterowania ruchem tłoka wykonany na elementach serii „Logic T” pokazano na ryc. 3. Elementy D1-D3 typu T-201 służą do koordynacji wejściowych sygnałów przekaźnikowych z elementami logicznymi.
Pamięć elementów D4.1, D4.2 naprawia obecność polecenia ruchu „do przodu”, gdy przekaźnik KQ jest włączony impulsowo. Poprzez wzmacniacz D5 włączany jest przedni stycznik KM1. Pod koniec ruchu mechanizmu „do przodu”, gdy styk sterownika SQ 1 jest zamknięty, na wyjściu odpowiedniego elementu D2 pojawia się sygnał 1, który wyłącza pamięć D4 i stycznik KM1 i włącza się pamięć na elementach D6. W tym przypadku wydawane jest i zapamiętywane polecenie cofnięcia się.To polecenie jest usuwane i ruch do tyłu zostaje zatrzymany, gdy styk kontrolera SQ 2 zamknie się w pozycji początkowej, gdy na wyjściu odpowiedniego elementu D3 pojawi się sygnał 1, wyłączający pamięć D6.
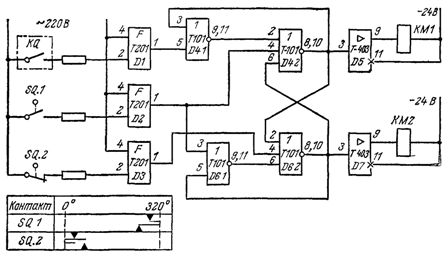
Ryż. 3. Schemat sterowania ruchem posuwisto-zwrotnym na elementach serii «Logic T»
Pamięci D4 i D6 są zablokowane, więc można włączyć tylko jedną z nich. Kiedy pamięć D4 jest włączona, sygnał 1 z wyjścia elementu D4.2 jest podawany na wejście 2 elementu D6.2, blokując pamięć D6 i odwrotnie. Gdy pamięć D6 jest włączona, sygnał 1 z wyjścia elementu D6 2 jest podawany na wejście 6 elementu D4.2, blokując pamięć D4.