Obwody sterowania i zasilania elektromagnesów podnoszących
 Elektromagnesy podnoszące mają dużą indukcyjność, dlatego do szybkiego i całkowitego rozładowania ładunku, a także do ograniczenia przepięcia do wartości nie większej niż 2 kV, stosuje się specjalne obwody i urządzenia sterujące. Elektromagnesy otrzymują napięcie z generatora silnikowego lub prostownika. Schematyczne schematy sterowania, gdy elektromagnesy są zasilane siecią prądu stałego, pokazano na ryc. 1, aib.
Elektromagnesy podnoszące mają dużą indukcyjność, dlatego do szybkiego i całkowitego rozładowania ładunku, a także do ograniczenia przepięcia do wartości nie większej niż 2 kV, stosuje się specjalne obwody i urządzenia sterujące. Elektromagnesy otrzymują napięcie z generatora silnikowego lub prostownika. Schematyczne schematy sterowania, gdy elektromagnesy są zasilane siecią prądu stałego, pokazano na ryc. 1, aib.
Kontrola elektromagnes podnoszący zgodnie ze wskazanym schematem odbywa się w następujący sposób. Gdy sterownik K jest włączony, napięcie jest przykładane do stycznika magnesującego B, którego styki zamykające łączą elektromagnes z siecią. W tym przypadku prąd znamionowy przepływa przez cewkę M elektromagnesu, a równolegle połączona rezystancja rozładowania (P1 — P4, P4 — PZ i PZ — P2) krąży z prądem o mniejszej wartości. Cewka H stycznika podłączona między punktami 6 i 7 nie przewodzi z powodu obecności połączonego szeregowo otwartego styku pomocniczego B, otwartego, gdy stycznik B jest załączony.
Kiedy kontroler K.wyłącza się, styki zwierne stycznika B otwierają się, elektromagnes zostaje na chwilę odłączony od napięcia i automatycznie przełącza się na odwrotną polaryzację, a po spadku obciążenia następuje ostateczne odłączenie elektromagnesu od źródła zasilania. To włączenie elektromagnesu zapewnia rozmagnesowanie ładunku, co przyczynia się do jego szybkiego spadku.
Samoczynne działanie po wyłączeniu elektromagnesu zapewnia głównie działanie stycznika rozmagnesowującego H. Napięcie na zaciskach cewki stycznika H jest określone spadkiem napięcia na odcinkach rezystancyjnych 6 — P4 i P4—7 . Gdy elektromagnes jest wyłączony, jego prąd nie zanika natychmiast, ale jest zamykany przez obwód rezystancji wyładowczych. Rezystancje sekcji 6 — P4 i P4—7 dobiera się tak, aby po wyłączeniu sterownika K i zwarciu styku otwierającego B stycznik H był załączony.
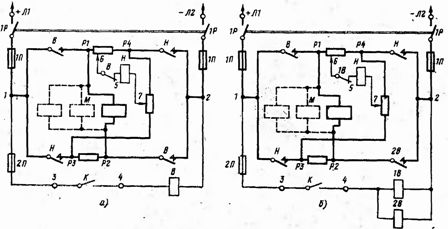
Ryż. 1. Schematyczne schematy sterowania sterowników magnetycznych PMS 50(a) i PMS 150(b) do podnoszenia elektromagnesów: V lub 1V, 2V-stycznik magnesujący bipolarny lub dwa unipolarne; H — stycznik rozmagnesowania dwubiegunowy; 1P — przełącznik; 1P, 2P — bezpieczniki obwodu mocy i obwodu sterowania; K — kontroler poleceń; M — elektromagnes; Rezystory rozładowcze P1-P4, P4-P3 i P3-P2.
Po załączeniu stycznika H jego styki zasilające są zwarte, a elektromagnes zostaje podłączony do sieci. W tym przypadku kierunek prądu w cewce elektromagnesu iw rezystancji 6-P4 połączonej szeregowo z cewką zmienia się z czasem na przeciwny. Zmiana kierunku prądu w odcinku rezystancji 6 — P4 następuje przy wstępnym zmniejszeniu poprzedniego prądu skierowanego przeciwnie do zera.Przy zerowym prądzie w sekcji 6 — P4 stycznik H pozostaje włączony, ponieważ spadek napięcia w sekcji P4-7 jest do tego wystarczający (w sekcji 6 — P4 spadek napięcia wynosi zero).
Gdy kierunek prądu zmienia się w sekcji 6 — P4, stycznik H zostaje wyłączony, ponieważ okazuje się, że jego cewka jest podłączona do różnicy spadku napięcia w sekcjach 6 — P4 i P4 — 7. Przerwanie stycznika H następuje, gdy prąd rozmagnesowania osiągnie wartość równą 10-20% prądu roboczego zimnej cewki elektromagnesu, czyli praktycznie po rozmagnesowaniu i utracie obciążenia.
Po wyłączeniu stycznik H odłącza cewkę elektromagnesu od sieci, która pozostaje zamknięta dla rezystancji rozładowania. Ułatwia to przerwanie łuku ze stycznika i zmniejsza przepięcia, zwiększając żywotność izolacji cewki. Rozwarcie styku pomocniczego stycznika B (w obwodzie cewki stycznika H) uniemożliwia jednoczesną pracę obu styczników.
Obwód umożliwia regulację czasu rozmagnesowania, co można zrobić, przesuwając zaciski rezystora, czyli zmieniając wartości rezystancji sekcji 6 — P4 i P4—7. Jednocześnie czas ten jest automatycznie dostosowywany w zależności od rodzaju podnoszonego ładunku. Przy większej masie ładunku jego przewodnictwo magnetyczne jest większe, co prowadzi do wzrostu stałej czasowej elektromagnesu, a tym samym do wydłużenia czasu rozmagnesowania. Przy niewielkiej masie ładunku czas rozmagnesowania jest skrócony.
Zgodnie z opisanym schematem produkowane są regulatory magnetyczne typu PMS 50, PMS 150, PMS50T i PMS 150T.
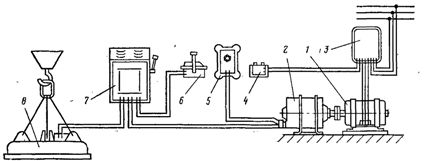
Ryż. 2.Obwód elektryczny elektromagnesu podnoszącego dźwigu w obecności sieci prądu przemiennego: 1 — asynchroniczny silnik elektryczny; 2 — odpowiedni generator prądu; 3 — rozrusznik magnetyczny; 4 — przycisk sterujący; 5 — regulator wzbudzenia; 6 — kontroler poleceń; 7 — kontroler magnetyczny; 8 — elektromagnes podnoszący.
Większość dźwigów z elektromagnesami do podnoszenia jest zasilana z sieci prądu przemiennego, więc w przypadku elektrozaworów prądu stałego należy zastosować generator lub prostownik. na ryc. 2 pokazuje obwód zasilania elektromagnesu podnoszącego z generatora silnikowego. Zabezpieczenie generatora przed prądami zwarciowymi. w kablu zasilającym elektromagnes prowadzony jest przekaźnik napięciowy typu REV 84.
Zastąpienie przetwornic obrotowych przetwornicami statycznymi zmniejsza koszty kapitałowe, masę elektryczną i koszty operacyjne. Sterownik magnetyczny typu PSM 80 w połączeniu ze sterownikiem KP 1818 selsyn umożliwia regulację nośności. Ma to ogromne znaczenie przy pracach związanych z wykańczaniem, sortowaniem, znakowaniem i transportem blach w zakładach hutniczych, a także w różnego rodzaju magazynach i bazach.
na ryc. 3 przedstawia schemat działania sterownika magnetycznego PSM 80 z przetwornicą sterowaną statycznie. Konwerter jest wykonany zgodnie z beztransformatorowym trójfazowym obwodem pełnofalowym z jednym tyrystorem i diodą wyładowczą. Regulacja prądu odbywa się poprzez zmianę napięcia wyjściowego przetwornicy poprzez zmianę kąta otwarcia tyrystora. Kąt otwarcia tyrystora zależy od sygnału odniesienia, który jest bezstopniowo regulowany w szerokim zakresie za pomocą synchronicznego sterownika sterującego.
Zasilanie I wykorzystuje transformator trójuzwojeniowy.Uzwojenie 36 V służy do zasilania elementów przekaźnika, napięcie wzbudzenia selsin sterownika jest usuwane z uzwojenia 115 V. W skład zasilacza wchodzi prostownik jednofazowy D7-D10, na wyjściu którego znajdują się diody Zenera St1-St3 i rezystor balastowy R2 są zainstalowane.
Ustabilizowane napięcie zasilania elementu przekaźnikowego 16,4 V jest usuwane przez diody Zenera St2 i St3. W tym przypadku prąd przewodzenia przepływa przez rezystor R3 i podstawę tranzystora T1, który włącza tranzystor. Z diody Zenera St1 do podstawy tranzystora T2 przykładane jest ujemne napięcie polaryzacyjne (-5,6 V), aby go wyłączyć, gdy tranzystor T1 jest otwarty.
Zadanie blokowe II składa się z Selsinawchodzących w skład sterownika selsyny oraz prostownika jednofazowego D11-D14. Napięcie sieciowe wirnika selsynowego jest podawane na wejście mostka, które zmienia się, gdy obraca się względem stojana. Wirnik jest obracany przez uchwyt CCK.Na wyjściu mostka uzyskuje się zmieniające się napięcie wyprostowane, proporcjonalnie do którego zmienia się również prąd wyjściowy, który przepływa, gdy tranzystor T1 jest otwarty, przez jego podstawę i rezystor R6. Element przekaźnikowy jest montowany na dwóch tranzystorach typu p-p-p.
Aby zapewnić tryb kontroli fazy w obwodzie, zapewniono piłokształtne źródło napięcia, które jest obwodem RC, który jest bocznikowany przez tyrystor T. Gdy tyrystor jest zamknięty, kondensatory C4 C5 są ładowane. Kiedy tyrystor T otwiera się, następuje szybkie rozładowanie kondensatorów. Prąd piły przepływa przez rezystor R13 i bazę tranzystora T1.
Sterownik selsinki ma jedną stałą pozycję (zero) i zapewnia stan hamowania w dowolnej pośredniej pozycji manetki sterującej.W tym przypadku każdej pozycji selsynu wirnika odpowiada określona wartość prądu elektromagnetycznego. W pozycjach kontrolnych obwód utrzymuje z wystarczającą dokładnością średnią wartość prądu elektromagnesu, gdy jego cewka jest podgrzewana. Tolerancje prądu dla cewki zimnej i gorącej nie przekraczają 10%, a maksymalna wartość prądu dla cewki nagrzewanej nie przekracza wartości katalogowej prądu o więcej niż 5. Gdy napięcie zasilania waha się w przedziale (0,85 - 1,05) UH, zmiana prądu elektromagnesu nie przekracza określonych limitów.
Obwód przełączający po stronie prądu stałego obejmuje:
• styczniki dwubiegunowe do bezpośredniego przełączania elektromagnesu KB i rewersyjnego CV;
• dwa przekaźniki czasowe РВ i РП do sterowania procesem rozmagnesowania elektromagnesu podczas postoju,
• rezystory rozładowcze R19 — R22 ograniczające przepięcia powstające przy wyłączonym elektromagnesie;
• dioda D4 do zmniejszania mocy rezystorów rozładowczych.
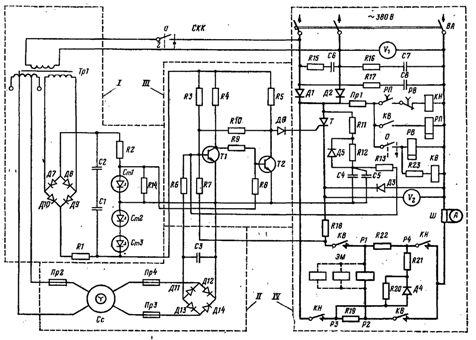
Ryż. 3. Schemat regulacji obciążalności elektromagnesu: I - blok zasilania: II - blok zadaniowy; III — element przekaźnikowy; VI — obwód zasilania; R1 — R25 — rezystory; C1 — C8 — kondensatory, W — bocznik; VA — przełącznik automatyczny; D1 -D16 — diody; KV i KN — styczniki z bezpośrednim i odwrotnym uzwojeniem elektromagnesu (magnesowanie i demagnetyzacja); РВ i РП — przekaźnik czasowy do sterowania procesem rozmagnesowania, Pr1 — Pr4 — bezpieczniki; Сс — kontroler selsyn; St1 -St3 — diody Zenera; T — tyrystor: T1, T2 — tranzystory, TP1 — transformator; EM — elektromagnes podnoszący; SKK — kontroler sterowania selsyn.
W przypadku zerwania przewodu zasilającego elektromagnes należy wyłączyć wyłącznik lub wyłącznik automatyczny sterownika magnetycznego. Surowo zabrania się przebywania pod kranem z działającym elektromagnesem. Kontrolę i wymianę urządzeń należy przeprowadzać przy wyłączonym wyłączniku głównym baterii.
Wszystkie urządzenia elektryczne muszą być bezpiecznie uziemione. Zwróć szczególną uwagę na uziemienie elektromagnesu. Śruba uziemiająca w skrzynce elektromagnesu jest połączona ze śrubą uziemiającą szafki sterownika magnetycznego. Połączenie wykonuje się z jednej z żył trójżyłowego kabla zasilającego. W przeciwnym razie w eksploatacji urządzeń elektrycznych należy kierować się ogólnymi zasadami bezpieczeństwa przy obsłudze instalacji elektrycznych.